基于天棚控制算法的磁流变半主动控制系统的研究
2016-07-02周武能杨佳乐东华大学信息科学与技术学院上海201620
张 杨,周武能,潘 亮,杨佳乐(东华大学信息科学与技术学院,上海201620)
基于天棚控制算法的磁流变半主动控制系统的研究
张 杨,周武能,潘 亮,杨佳乐
(东华大学信息科学与技术学院,上海201620)
以天棚控制方法为理论基础,结合磁流变减振器的工作机制,建立了磁流变半主动悬架硬件结构系统,并通过在实车试验平台上实验分析了被动悬架和磁流变半主动控制悬架的平顺性。结果表明,相比于被动悬架,磁流变半主动悬架能够很好地抑制低频段车体垂直方向的加速度变化和振动幅值,从而提高车辆平稳性和舒适性。
半主动悬架;二自由度;天棚控制
O 引言
车体与车轮间的动力悬架是车辆的重要构成部分。悬架性能的好坏将直接影响到车辆在行驶过程中的行驶安全性、乘坐舒适性和操纵稳定性[1]。传统的被动悬架由阻尼系数和刚度不可变的阻尼元件及弹性元件构成,被动悬挂系统在构建前需要设定好阻尼系数和刚度。由于参数设定好后不具可调性,仅仅能够适应一定工况下的振动,对多变的行驶路况适应能力很差。半主动悬架可以在一定范围内对执行元件的阻尼或刚度进行调节,具有功耗低、结构简单、成本低、容错性好等特点[2]。磁流变减振器是利用新型材料磁流变液在变化磁场作用下快速可逆的流变特性而设计的一种新型作动器,具有耗能低、可产生连续阻尼力、方便控制等优点,所以把磁流变技术应用于半主动悬架中进行研究具有重大意义。
本文以提高车辆行驶平顺性和乘坐舒适性为研究重点,将磁流变减振器应用于基于天棚控制算法的半主动悬架中,搭建硬件设备平台,实现软件设计,最后通过在车辆震动实验平台上获取的实验数据进行对比分析磁流变半主动悬架和被动悬架对提高车体行驶平顺性和乘坐舒适性的影响。
1 算法设计
整车一般由4个悬挂系统组成,但理论分析时常采用1 /4车二自由度悬挂系统模型,如图1所示为二自由度悬挂系统模型。该悬挂系统模型动力学方程式可表示为:

式中,M2、M1分别为车体质量和车轮质量;ks、kt分别为悬挂弹簧和车轮刚度;Ce为悬挂阻尼系数;X2、X1分别为车体垂直位移和车轮垂直位移;X0是路面向上激励;F为控制力,当F不作用时上述模型可以等效为被动悬架。

图1 二自由度悬挂系统模型
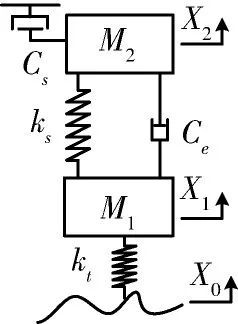
图2 理想天棚控?制悬架模型
如图2所示为理想天棚控制悬架。天棚控制算法的基本思想是在车辆车体和假设的“天棚”之间安装一个阻尼器。该阻尼器的阻尼系数变化时会产生不同的阻尼力作用于该控制悬架,起到减振的效果。假设车辆悬架的簧载质量与参考地面之间具有阻尼。
理想的天棚阻尼力为:

其中:Cs是天棚阻尼系数,取决于悬挂系统本身。根据图2写出运动微分方程如下:

根据与天棚阻尼等效的原则,图1所示的半主动悬架中的力F由磁流变减振器[3 -4]来提供,即图1中的F与天棚阻尼力Fs存在某种关系。由于所以当同向时,F与Fs同向[5],因此可以通过改变励磁电流的大小使Fs与F相等;当与反向时,F与Fs反向。为了尽可能缩小两者差异,应该让F最小。考虑到磁流变减振装置自身存在一定的阻尼,因此F最小值不能取到0值,,因此F的取值可以表述为:
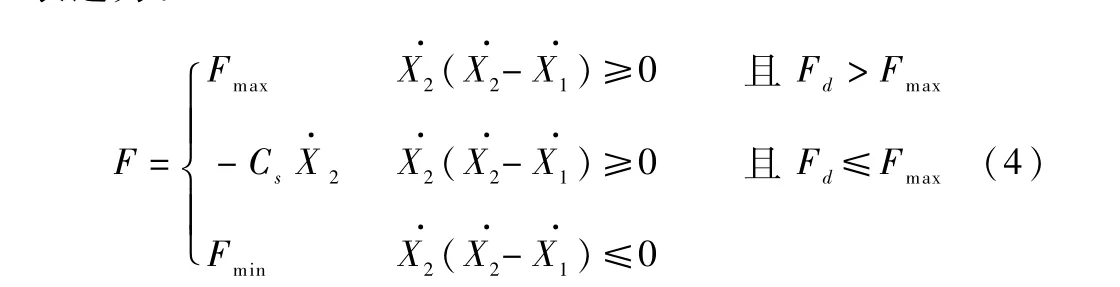
式(4)中的力F由磁流变阻尼器提供。
2 磁流变悬挂系统构建
悬挂系统包括硬件结构搭建和软件算法部分,如图3、图4所示。硬件部分主要包括加速度传感器、PCI数据采集器、工控机、程控电流源和磁流变减振器。软件需要实现模拟输入信号的采集、滤波、积分和微分,然后通过上述的天棚算法对程控电流源输出一个控制电流的指令,最后通过电流信号改变磁流变阻尼器产生一个阻尼力Fcs反馈作用于悬挂系统,达到减缓系统振动的效果。
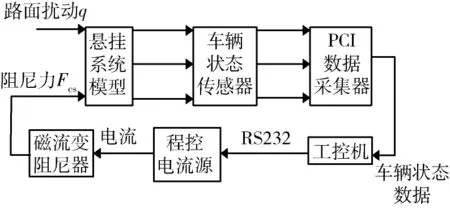
图3 系统结构图

图4 软件实现部分
3 道路实验结果分析
设某越野车在特定路面上以9 m/s匀速直线行驶。本次试验采用某公司的752A13加速度传感器采集垂直方向上车体质心加速度和驾驶员座椅处的加速度信号,通过对悬挂系统上的磁流变阻尼器输出控制指令和终止对磁流变阻尼器输出电流指令两种情况下的数据采集,显示车体质心和驾驶员座位处加速度的变化情况。磁流变阻尼器没有工作的情况下该悬挂系统等效于被动悬架。
图5为某时刻路面输入情况。图6和图7所示的是加速度变化情况,由于磁流变半主动悬挂系统中的阻尼器产生的阻尼力F对整个控制系统起到了一定的调节作用,所以在相同的路面条件下装有磁流变阻尼器的车辆在行驶过程中垂直方向的加速度变化明显低于磁流变阻尼器没有起到任何作用时的情况。从图中可以看出,驾驶员位置和车体质心处装有磁流变阻尼装置的半主动悬挂系
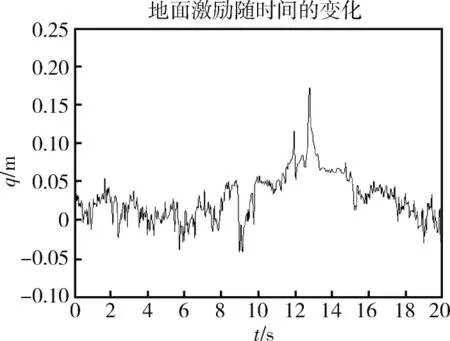
图5 路面激励
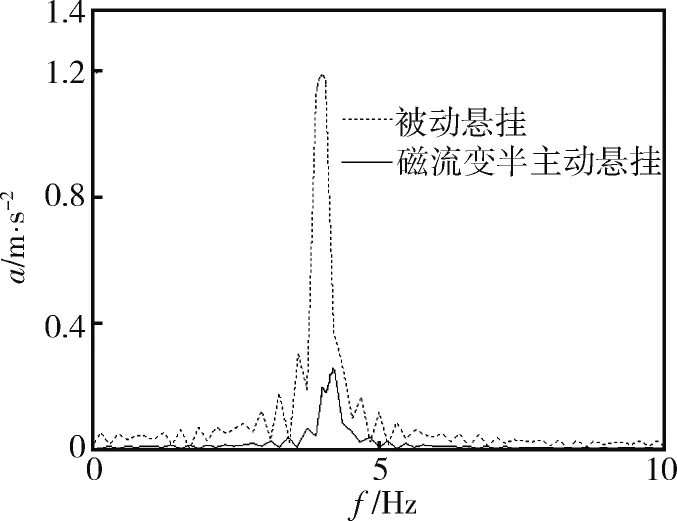
图6 车体质心处加速度变化情况

图7 驶员座位处加速度变化情况
统比被动悬挂控制系统的垂直方向的振动加速度下降了70%~80%,特别是在低频段尤为明显,明显会提高车辆行驶平顺性和乘坐舒适性。由此可见磁流变阻尼器应用于半主动悬挂系统中有利于降低低频共振的幅值,具有推广意义。
4 结论
本文以提高车辆行驶平顺性和乘坐舒适性为研究重点,将磁流变减振器应用于基于天棚控制算法的半主动悬架中,搭建硬件设备平台和实现软件设计,最后通过对在车辆震动实验平台上获取的实验数据进行对比,分析磁流变半主动悬架和被动悬架对提高车体行驶平顺性和乘坐舒适性的影响。分析可知装有磁流变阻尼装置的半主动悬挂系统有利于降低车辆行驶过程中垂直方向的震动幅值,低频段的抑制作用尤为明显,可明显提高车辆行驶平顺性和乘坐舒适性,具有较大的推广意义。
[1]周长城.车辆悬架设计及理论[M].北京:北京大学出版社,2011.
[2]彭志召,张进秋,张雨,等.车辆半主动悬挂的频域控制算法[J].装甲兵工程学院学报,2013,27(4):36-42.
[3]JORDANTC,SHAW M T.E1ectro-rheo1ogy[J].IEEETransaction on E1ectrica1Insu1ation,1989,24(5):849-879.
[4]HROVATD.Surveyofadvanced susPension deve1oPmentsand re1ated oPtima1contro1aPP1ications[J].Automatica,1997,33 (10):1781-1817.
[5]赵石堂,陈思忠,冯占宗,等.磁流变半主动悬架的天棚控制方法研究[J].汽车工程学报,2011,1(2):127-133.
Research of magneto-rheo1ogica1semi-active susPension system based on the sky-hook contro1method
Zhang Yang,Zhou Wuneng,Pan Liang,Yang Jia1e
(Co11ege of Information Science&Techno1ogy,Donghua University,Shanghai 201620,China)
Based on the sky-hook contro1method,this PaPer estab1ished the magneto-rheo1ogica1 semi-active susPension hardware structure combining with the working mechanisms of the magneto-rheo1ogica1 shock damPer.The ride com fort of Passive susPension and semi-active sus-Pension was ana1yzed on rea1vehic1e exPeriment P1atform.The resu1ts show that comPared with the Passive susPension,sem i-active susPension can restrain change of the acce1eration in the vertica1direction and vibration amP1itude in the 1ow frequency of vehic1e body.Thus semi-active susPension can imProve vehic1e stabi1ity and com fort.
semi-active susPension;two degrees of freedom;sky-hook contro1
TP23
A
10.19358 /j.issn.1674-7720.2016.09.002
张杨,周武能,潘亮,等.基于天棚控制算法的磁流变半主动控制系统的研究[J].微型机与应用,2016,35(9):6-7,14.
2016-01-14)
张杨(1992 -),男,硕士研究生,主要研究方向:计算机网络融合与系统集成,半主动悬挂控制系统。
周武能(1959 -),男,博士,教授,博士生导师,主要研究方向:神经网络稳定性与同步,复杂网络稳定性与同步,传感器网络协同与控制,鲁棒控制,工业过程控制。
潘亮(1990 -),男,硕士研究生,主要研究方向:智能控制,模糊PID的多电机同步控制。