基于嵌入式的IC芯片外观质量检测系统设计
2016-07-01作者陈文凤佛山职业技术学院张淼广东工业大学自动化学院欧幸福李本红佛山职业技术学院
作者 / 陈文凤,佛山职业技术学院;张淼,广东工业大学自动化学院;欧幸福、 李本红,佛山职业技术学院
基于嵌入式的IC芯片外观质量检测系统设计
作者 / 陈文凤,佛山职业技术学院;张淼,广东工业大学自动化学院;欧幸福、 李本红,佛山职业技术学院
为解决人工检测集成芯片引脚存在的诸多弊端,设计一套基于ARM-DSP双核结构的集成芯片引脚缺陷自动检测系统。采用阈值分割算法提取芯片引脚目标,通过灰度跃变检测引脚中心点,并统计引脚中点间距以识别芯片引脚缺陷;设计实现图像采集电路、图像处理电路和其他外围控制电路等,并进行实验研究。实验结果表明设计的系统检测速度快,检测精度高。
嵌入式;集成芯片;引脚缺陷检测;
引言
在IC集成芯片器件生产过程中,芯片的外观质量检测是其中一项必不可少的环节,包括芯片的引脚尺寸、残缺、偏曲、间距不均、平整度差等检测项目,而上述质量问题会直接影响电路产品的质量。目前IC集成芯片器件的外观质量检测主要采用人工目检方法。但人工目检方法存在检测速度慢、检测精度低等诸多缺陷,在一定程度上制约了我国芯片生产行业的发展,如何改进生产检测工艺,实现检测方法的智能化和自动化,提高微观级别工艺检测精度和效率,降低成本,促进大规模集成电路工业化生产技术的升级,成为产业发展的迫切需要。
针对集成芯片的特点,本文提出一种集成芯片引脚缺陷检测的图像处理方法,并设计基于ARM和DSP双处理器的芯片引脚缺陷实时检测系统,实现对芯片引脚的外观质量检验。
1. 系统总体
系统是由背景光源及驱动电路、线阵式CCD工业相机及其辅助装置、FPGA图像采集电路、基于DSP和ARM双处理器结构的嵌入式图像处理和控制部分、信号输出部分等组成。
嵌入式图像处理和控制部分是系统的核心,主控制器采用三星公司的S3C6410 ARM处理器,配置、移植Linux操作系统,协处理器使用TI公司的TMS320C6678DSP处理器。DSP协处理器主要接收来自FPGA图像采集电路传送过来的图像数据,完成图像预处理、分割、模板匹配、缺陷分析等复杂的图像处理工作,将图像处理结果发送给ARM主控制器,同时以AV信号输出给显示器进行显示。
ARM主控制器主要完成人机交互、任务管理、数据输入输出、外部设备的控制和通信等系统的基本运行。(1)通过操作触摸屏查看图像处理结果等数据,设置、处理系统参数等;(2)接收光纤传感器的芯片位置触发信号,通过光源控制器点亮环形LED光源,触发CCD工业相机拍摄芯片图像;(3)采集、处理和控制电机转速、加减速及正反转。(4)将检测结果数据存储到硬盘中,以待日后查阅、统计应用等;(5)根据图像处理结果,控制剔除装置剔除缺陷芯片等。
2. 系统硬件设计
■2.1 图像处理电路
为满足ARM主处理器和DSP协处理器之间高速的数据传输要求,本文采用基于IDT70261的双端口RAM的接口电路,通过IDT70261芯片两组独立数据接口D0LD15L和D0R-D15R实现S3C6410和TMS320C6678连接。
■2.2 ARM外围控制电路
主控制器S3C6410的外围控制电路主要包括触摸屏显示器、以太网接口电路、电机控制电路、环形光源控制电路、光纤传感器、硬盘存储器以及次品分拣装置等部分。
3. 系统软件设计
■3.1 系统软件实现流程
集成芯片引脚缺陷检测算法包括对集成芯片的引脚尺寸偏差、残缺、偏曲、间距不均等类型缺陷的检测。
4. 实验结果及分析
系统图像传感器采用30万像素的嘉恒OK_AM1121 型1/3英寸黑白面阵CCD工业相机;配备6mm的T2616FICS-3型Computar镜头;背景光源使用奥普特OPT-RI5030白色LED环形光源,同时将EMCV (Embedded Computer Vision Library)移植至系统DSP协处理器上完成图像的预处理等工作。
■4.1 芯片图像提取
使用上述算法对2000幅集成型芯片图像进行测试验证,现选取3幅有代表性的图像予以说明。分别对原始图片进行旋转至准水平、裁剪、滤波降噪、二值分割和开关运算等处理提取芯片引脚目标。
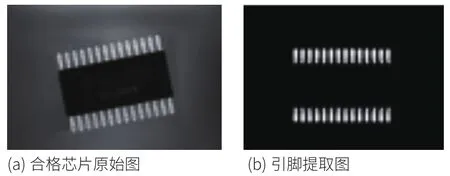
图1 合格芯片引脚提取算法效果

图2 引脚缺失提取算法效果
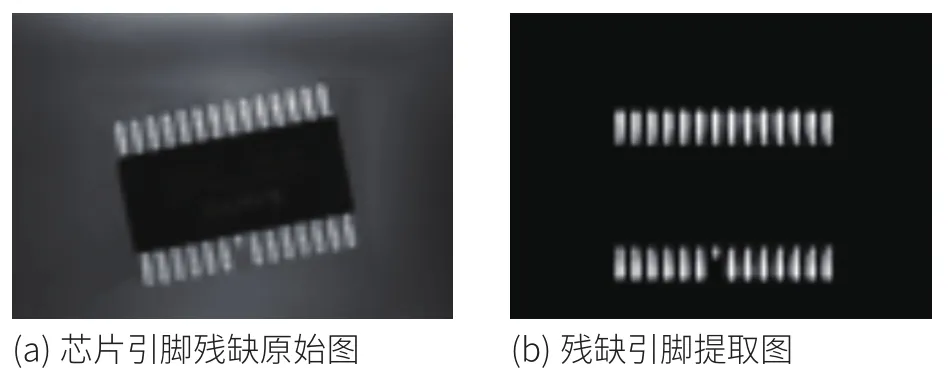
图3 引脚残缺提取算法效果
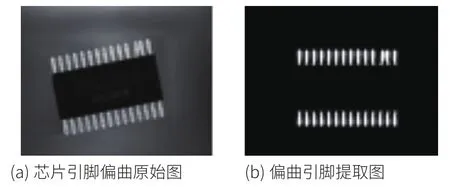
图4 引脚偏曲提取算法效果
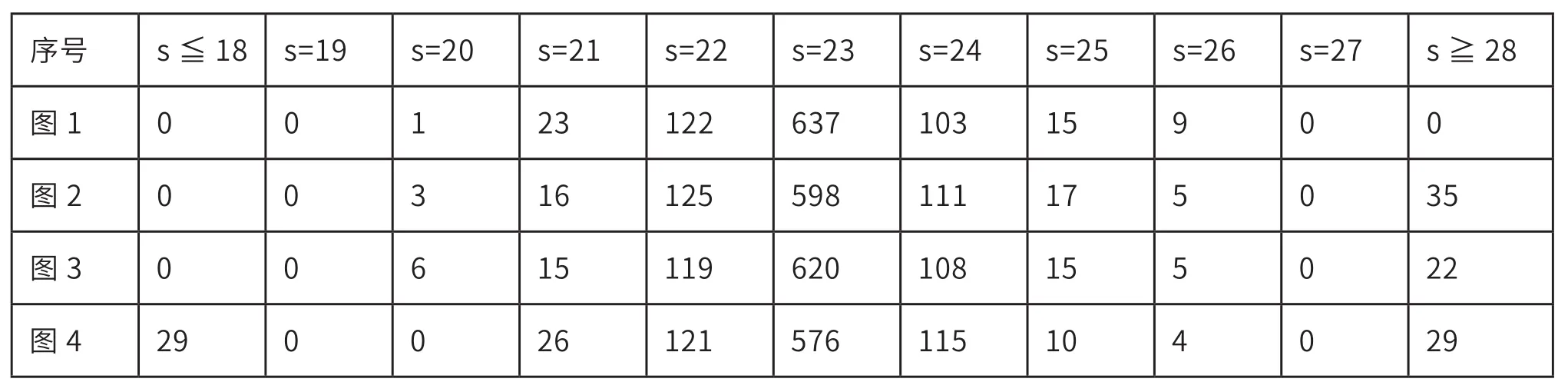
表1 引脚中心间距统计结果
■4.2 引脚缺陷检测
根据集成芯片常用封装标准,引脚间距为1.27mm,引脚长度为2.54mm。结合系统的标定和芯片图像的测量统计结果,引脚平均长度为46个像素,引脚平均间距为23个像素,合格芯片引脚个数为单列14个,按照设计要求设定合格引脚间距误差为不超过5个像素。
在提取芯片引脚图像的基础上,使用本文的方法进行缺陷检测,分别设置35条灰度跃变检测直线,获取引脚根部、端部和其他部分的中心坐标,记录引脚根部中心个数,并得到芯片缺失引脚个数;计算每条扫描直线上每两个引脚中心坐标的间隔距离,如表1所示,其中图1所示芯片引脚间距均在标准范围内,图2、图3、图4所示芯片引脚分别存在缺失、残缺、偏曲等缺陷。
通过对2000个集成芯片进行检验,可得系统的引脚缺陷检验出错率为0.5%,且其中0.2%错判现象为合格产品被误判为次品,系统可满足实际生产的需要。
5. 结束语
本文提出了整个集成芯片引脚缺陷检测系统的硬件设计和软件算法设计;采用ARM+DSP的双处理器结构实现缺陷检测算法和系统应用功能的快速处理;设计了迭代阈值二值分割算法和数学形态学算法相结合的方法完成引脚图像的有效提取,设计了基于灰度跃变检测引脚中心点的引脚缺陷识别方法。从实验结果看来,该方法检测效率高、稳定性好,满足工程的实际应用。
* [1] 朱更明,李方敏.芯片管脚缺陷在线视觉检测系统研究[J]. 电子制作,2015,30(9):1866-1873.
* [2] 郑金驹,李文龙,王瑜辉,等. QFP芯片外观视觉检测系统及检测方法[J]. 中国机械工程,2013,24(3):290-298.
* [3] MaYide,Dai Ruo lang,Li Lian. Ancounting and segmenta tion method of blood cell image with logical and morpho log ical feature of cell [J]. Chinese Journal of Electronics,2002,11(01):53-55.
广东省教育部产学研重大专项(2012A090300005)资助项目
