浅谈GPS RTK在工程中的应用
2016-06-30刘晨辰薛亮
刘晨辰+薛亮

【摘 要】本文简述GPS原理,介绍GPS RTK相关工作原理以及两种测量模式,并结合其在一个工程中实际应用的例子,指出其相较于传统工程测量方式的优缺点。
【关键词】GPS;RTK;工程测量
1 GPS系统简介
全球定位系统(Global Positioning System,简称GPS)是美国从20实际70年代开始研制的用于军事部门的新一代卫星导航与定位系统。
1.1 GPS的构成
GPS主要由GPS卫星星座(空间部分)、地面监控部分。用户接收处理部分组成。
1.1.1 空间部分
GPS空间部分由24颗GPS工作卫星组成,这些GPS工作卫星共同组成了GPS卫星星座,其中21颗为可用于导航的卫星,3颗为活动的备用卫星。这24颗卫星分布在6个倾角为55°的轨道上绕地球运行,卫星的运行周期约为12恒星时。每颗GPS工作卫星都发射用于导航定位的信号。GPS用户正是利用这些信号来进行工作。
1.1.2 地面监控部分
GPS的地面监控部分由分布在全球的若干个跟踪站组成的监控系统所构成,根据起作用的不同,这些跟踪站又被分为主控站、监控站和注入站。GPS的地面监控部分主要作用是根据获得数据计算卫星的星历和卫星钟的改正参数等,并将这些数据反馈给卫星,同时也可以对卫星进行控制,向卫星发布指令,当工作卫星出现故障时,调度备用卫星,替代失效的工作卫星工作。
1.1.3 用户接收处理部分
GPS的用户部分由GPS接收机、数据处理软件及相应的用户设备(如计算机、气象仪器等)组成。它的作用是接受GPS卫星所发出的信号。并利用这些信号进行导航定位工作。
1.2 GPS RTK工作原理
1.2.1 GPS定位原理
GPS定位是根据测量中的距离教会定点原理实现的。在待测点Q设置GPS接收机,在某一时刻GPS同时接收到3颗(或3颗以上)卫星S1,S2,S3所发出的信号。通过数据处理和计算,可求得该时刻接收机天线中心(测站点)至卫星的距离P1,P2,P3。根据卫星行李可获得该时刻3颗卫星的三维坐标(Xi,Yi,Zi),i=1,2,3,从而由下式解算出Q点的三维坐标(X,Y,Z):
P12=(X-X1)2+(Y-Y1)2+(Z-Z1)2
P22=(X-X2)2+(Y-Y2)2+(Z+Z2)2
P32=(X-X3)2+(Y-Y3)2+(Z-Z3)2
1.2.2 RTK工作原理
RTK,即实时动态相对定位(real time kinematic positioning)。相位动态相对定位,由于采用的载波相位观测值存在整周模糊度参数,要实现精密动态相位定位,必须预先解算载波相位整周模糊度,一旦整周模糊度确定,则定位结算只需4颗以上卫星的同步观测值一个历元即可。如果将参考站观测数据(或改正数)通过无线数据链路发送到流动站接收机,流动站接收机在确定(或称固定)载波相位观测值的初始模糊度后(又称初始化完成),就可以实现实时动态相对定位(RTK)。目前,在一定的范围内(如流动站和参考站间的距离小于20km时),其定位精度可达1~2cm以内。
2 GPS RTK的两种测量模式
2.1 快速静态定位模式
测量过程中要求GPS接收机在每一流动站上,静止地进行观测。在观测过程中,同时接收基准站和卫星的同步观测数据,实时解算整周模糊度和用户站的三维坐标,如果结算结果的变化趋于稳定,且其精度已经满足设计要求,便可以结束实时观测。一般应用在控制测量中,如控制网加密若采用常规测量方法(如全站仪测量),受客观因素影响较大,在自然条件比较恶劣的地区实施比较困难,而采用RTK快速静态测量,可起到事半功倍的效果。单点定位只需要5min~10min,不及静态测量所需时间的1/5,在工程测量中可以基本代替全站仪完成工作。
2.2 动态定位
测量前需要在一控制点上静止观测数分钟(有的仪器只需2~10s)进行初始化工作,之后流动站就可以按欲动的采样间隔自动进行观测,并连同基准站的同步观测数据,实时确定采样点的空间位置。目前,其定位精度可以达到厘米级。动态定位模式可以进行一般工程放线工作,方便快捷,且测量过程不需要通视,有着常规测量仪器(如全站仪)不可比拟的优点。
3 在工程中的应用实例
3.1 工程实例简介
蓝色硅谷轨道交通工程项目南起青岛崂山苗岭路北至青岛即墨市盐田东,全长59.2km,共设车站22座。平面基准为青岛城市坐标系(东部带),1980西安坐标系参考椭球,高斯投影中央子午线120度、45分带,投影面高程0m。
本文针对其利用GPS RTK模式对控制点数据测量的结果与采用常规导线测量的结果进行对比,分析其特点。
3.2 实际应用结果
本次测量采用GPS型号为徕卡GPS1200,采用全站仪型号为徕卡TC802,均可满足测量精度需要。
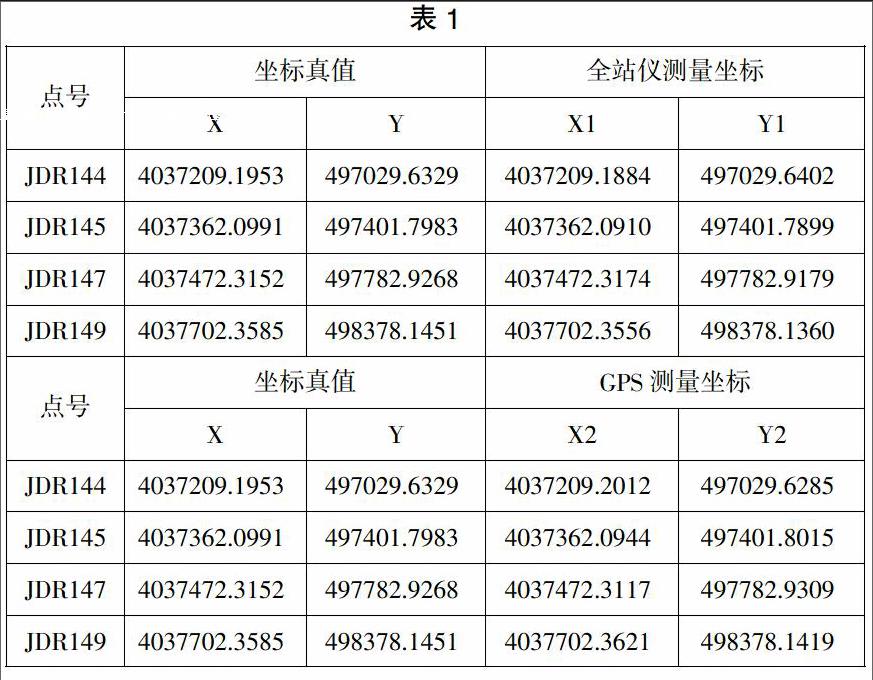
测量以测绘院提供坐标为真值,利用两种一起分别进行测量和数据处理,最终得到测量结果如表1:
两种测量方式与坐标真值进行比对,获得相互之间差值,如表2:
其中,全站仪测量结果与坐标真值最大差值为0.0091,GPS测量结果与坐标真值最大差值为0.0059,所的结果均符合工程测量规范(GB50026-2007)要求,且两种测量方式对同一点所得到数据差值较小,可以根据实际情况进行替代使用。
4 GPS RTK在工程测量使用中的优劣势
4.1 优势
相对于常规测量手段来说,GPS RTK在工程测量中主要具有以下优势:
1)测量精度高,根据所选设备最高能达到毫米级;
2)测站之间无需通视,解决了复杂环境导线测量所无法完成的工作;
3)观测时间短,一个测点仅需几分钟即可完成;
4)仪器操作简便,只要懂得最基本操作即可;
5)全天候作业,不受周围环境明暗影响;
6)根据实际情况可以提供三维坐标。
4.2 劣势
但是,GPS RTK在应用中也存在以下问题:
1)精度受到与基站距离,以及信号强度影响较,少数测区存在一些干扰源,造成RT K 测量质量不正常。
2)所得到的结果不稳定,必须为固定解才能正常使用。
3)天空环境影响。白天中午,受电离层干扰大,共用卫星数少,初始化时间长甚至不能初始化,达不到测量要求。GPS-RT K 半径比其标称半径要小很多,工程实践和专门研究都证明了这一点,解决这类问题的有效办法是把基准站布设在测区中央的最高点上。
4)数据的处理主要查看PDOP 值是不是超限,放样精度是不是达到作业精度的要求,基线距离是不是在规定的距离范围内等等,如达不到要求需考虑结合全站仪测量。
5)高程异常问题。RT K 作业模式要求高程的转换必须精确,但我国现有的高程异常图在有些地区,尤其是山区,存在较大误差,在有些地区还是空白,这就使得将GPS-RT K 大地高程转换至海拔高程的工作变得相当困难,精度也不均匀。
5 结语
随着我国国民经济的快速增长,我国的基础工程建设迎来前所未有的发展机遇,这就对测量技术提出了更高的要求,目前工程测量中虽已采用电子全站仪等先进仪器设备,但常规测量方法受横向通视和作业条件的限制, 作业强度大且效率低,大大延长了设计周期。
GPS RTK 应用于工程测量时可根据待测点的精度指标,确定观测时间,提高工作效率。展望未来,俄罗斯的GLONASS,欧盟的GALLIEO 以及我国的北斗都在亚太地区具备完全导航能力。我国 2000 国家大地控制网为GPS-RT K 提供了进一步的数据支撑。随着各部委、城市、矿区连续运行卫星定位服务系统(CORS)的建立和GPS 软硬件的不断更新,GPS RTK 技术在工程测量中的应用有着非常广阔的前景。
[责任编辑:杨玉洁]
