水面无人艇避碰方法回顾与展望*
2016-06-30文元桥周思杨肖长诗
吴 博 文元桥 吴 贝 周思杨 肖长诗
(武汉理工大学航运学院1) 武汉 430063) (内河航运技术湖北省重点实验室2) 武汉 430063) (武汉海事局3) 武汉 430000) (武汉第二船舶设计研究所4) 武汉 430000)
水面无人艇避碰方法回顾与展望*
吴博1,2)文元桥1,2)吴贝3)周思杨4)肖长诗1,2)
(武汉理工大学航运学院1)武汉430063)(内河航运技术湖北省重点实验室2)武汉430063) (武汉海事局3)武汉430000)(武汉第二船舶设计研究所4)武汉430000)
摘要:水面无人艇因其具有体积小、速度快、较好的隐身性、较高的智能化等特点被世界各国广泛应用.随着其应用价值的不断提高,水面无人艇日益成为国内外研究的焦点.避碰技术作为水面无人艇的核心技术之一,是实现无人艇安全航行正常执行任务的重要前提.针对水面无人艇的避碰问题,从水面无人艇全局路径规划和局部避碰的角度,分别阐述了国内外主要研究成果,并且总结了水面无人艇避碰方法目前存在的一些问题,同时对未来的研究方向进行了展望.
关键词:水面无人艇;避碰方法;全局路径规划;局部避碰
0引言
水面无人艇是因军事作战、海事监管巡航、海洋环境监测等需求应运而生的新型智能水面航行艇,常被用来执行在复杂多变的海洋环境中特殊的、不适合有人船只完成的任务.它集速度快、安全性高、多功能一体化等特点于一身,可实现快速、高效、准确完成任务的要求.在复杂多变的海洋环境中,水面无人艇安全航行、顺利完成各项任务的一个重要的前提就是水面无人艇能够实现避碰功能.作为水面无人艇研究的核心技术之一,水面无人艇的避碰不仅从一定程度上反映了水面无人艇智能化水平的高低,也是水面无人艇实现自主安全可靠航行的关键技术之一.水面无人艇避碰技术包括无人艇全局路径规划和局部避碰.
水面无人艇的全局路径规划主要解决水面无人艇定位和路径跟踪问题[1-2].水面无人艇在已知任务的起始点和目标点的情况下,根据任务的要求(时间最少、距离最短或者安全性最高等)规划出一条无碰可航路径.在进入某水域前,全局路径规划已为水面无人艇规划出在该水域安全可航的路径,这为其快速、灵活、安全地航行提供了基础.
水面无人艇的局部避碰是指在无人艇航行过程中,遇到障碍物(全局路径规划过程中未考虑的障碍物,例如,突然出现的船舶等)采取正确合理的规避行为.水面无人艇在航行过程中,遇到突然出现的船舶、漂浮物等碍航物时,能够及时有效的调整航速或航向,驶离原规划路径,进而躲避新出现的碍航物,在完成原目标任务的前提下,尽可能的确保快速安全航行.
水面无人艇在航行及执行任务过程中,可通过航行前的全局路径规划和航行过程中的局部避碰实现航线整体实时设定,完成无人艇的安全快速航行及正常执行相关任务的要求.下面分别介绍水面无人艇在全局路径规划和局部避碰方面的国内外研究成果.
1水面无人艇全局路径规划
目前,国内外已有许多专家学者对水面无人艇全局路径规划进行了研究,并取得了一定的研究成果.其中涉及到的研究方法包括可视图法、遗传算法、模糊算法、势场法、粒子群优化算法、Dijkstra算法和A*算法等.
陈超等[3]提出了一种基于可视图的 A*算法解决全局路径规划问题.该算法的优点在于结合了可视图法处理无人艇避让障碍物,同时运用启发式的方法增强可视图法对环境的适应性和实时性,不仅克服了传统可视图法灵活性差的问题,还可以提高规划效率.
在利用势场法进行路径规划过程中,容易出现局部最小点问题,造成无法找到最优路径.文献[4]针对这种情况提出了基于改进人工势场法的水面无人艇路径规划,通过建立新的引力和斥力势场函数来解决局部最小点问题.
当斥力大于引力时,将会产生水面无人艇不能到达目标位置,而是在目标点附近振荡情况.通常的斥力势场函数:
(1)
新的斥力势场函数:
(2)
式中:ρo为障碍物的影响距离;ρ为水面无人艇与障碍物的最近距离;x-xgoal为水面无人艇与目标之间的相对距离;n为一个任意的大于零的实数;ϑ为增益系数.改进算法的特点为:当无人艇向目标点前进时,斥力会大幅减小,保证整个势场仅在xgoal点.
当水面无人艇进入局部最小点,可以给引力加个振荡函数,以此来协助无人艇寻找下一个运动点.
通常的引力场函数:
(3)
新的引力场函数:
(4)
式中:F(X)为振荡函数;k为引力增益系数;X-Xgoal为水面无人艇与目标之间的相对距离.改进算法的特点为:当水面无人艇进入局部最小点时,振荡函数会随机改变引力场的方向,相当于改变了终点的坐标,以这种振荡行为来破坏平衡,以此协助水面无人艇走出局部最小点.
Soltan等[5-6]在对水面无人艇全局路径规划研究过程中,利用基于离散空间遗传算法、基于势场栅格法的人工势场算法进行路径规划,并选取合适的参数缩短规划时间和优化规划路径,提高了水面无人艇的安全航行效率.
饶森等[7]对水面无人艇的全局路径规划进行了系统的分析研究,研究了将遗传算法和分层模型相结合的路径规划算法,解决了大尺度环境范围内的全局路径规划问题.
庄佳园等[8]为解决水面无人艇全局路径规划问题,提出了一种基于电子海图的距离寻优Dijkstra算法,该算法基于电子海图进行环境建模,将电子海图信息转化为可识别模式进行环境读取,运用改变网格精度方法在水域中选取有效网格,并通过仿真验证了该方法的有效性.
文献[9]提出了利用基于电子江图的路径遍历算法进行内河水面无人艇路径规划研究.算法运用栅格法在内河水域中选择可航水域,并利用Voronoi图对动态物标建立航行路径集,进行优化后选取可航路径.
文献[10]设计了一种基于航海雷达图像处理的规划方法,以处理水面无人艇的全局路径规划问题.利用边缘保持去噪平滑算法和自适应阈值法对航海雷达的原始图进行处理并建立了环境模型.采用距离寻优的Dijkstra算法搜索最佳路径,将所提出的算法经海上和湖上实验加以验证.
庄佳园等[11]针对无人艇速度快及实时性要求高的特点,为满足路径规划需要,在经典快速扩展随机树(RRT)算法的基础上,设计一种基于改进RRT算法的路径规划方法,通过雷达获取环境信息,引入抑制因子,限定转角和距离启发信息,改进生长点和探索点的选择,提高了规划速度.采取去除多余规划航点和运用船舶回转性能平滑规划路径方法,缩短航行距离,提高了路径的可航性.
Kim等[12]结合Line-of-Sight(LOS)导航策略研究无人艇的全局路径规划问题(见图1),其主要功能为检测在规划的路径上是否存在障碍物,如果无人艇与目标位置LOS角度收敛于某一角度ψlos,那么该角度被视为收敛目标位置.在无人艇航行过程中,使无人艇位置能够收敛到期望路径上,偏航角收敛到视线角内.
(5)
Kim研究了基于ARC-θ*(angular rate-constrained-θ*)路径旋转角速率限制法方法的路径规划,该规划方法类似于A*算法,但主要区别在于选择规划点的不同.ARC-θ*中限制了LOS的收敛角度和能够适应于无人艇转弯能力的角速度大小,即
(6)
式中:r为角速度;v为航行速率;R为旋转半径.
该方法改善了其他算法没有考虑船舶的性能的不足,实现路径规划的实时性,并且具有规划路径距离最短优点.
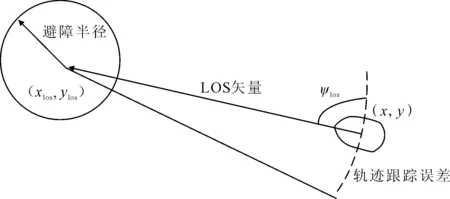
图1 Line-of-Sight(LOS)模型图
Campbell等[13]仍是基于LOS导航策略研究无人艇的路径规划问题.文中结合了无人艇控制方法,引入国际避碰规则作为限制因素研究水上无人艇避碰问题,国际海上避碰规则的融入主要是为降低由于人为错误造成的避碰事故.但是,运用LOS方法规划路径,容易在外界环境的扰动下提高轨迹跟踪误差,造成超调而无法精确到达下一指定点.
文献[14]基于快速步进(FM)方法进行无人艇路径规划研究.FM方法公式为

(7)
式中:T(x)为无人艇到达目标点的时间;w(x)为无人艇在目标点处的移动速度.文章中选取环境地图进行栅格化处理,建立环境模型,在没有障碍物的网格中赋值1,有障碍物的网格中赋值0.建立以物标到达不同点时间为势值的势场,到达越远的地方势场值越高.当有障碍物存在的地方,到达目标点的时间为无穷大.
该方法区别于势场法的地方为:FM的潜在领域有全局最小值,从而避免了局部最小值的问题出现.
在选取避碰路径过程中,找到从起始点到达目标点的所有最佳路径,选择其中势场值最低点的集合路径,并且该路径保证欧几里德距离最短.
Casalino等[15]利用分层思想进行避碰,其主要避碰策略为:利用栅格法建立环境模型,并根据障碍物信息及相关约束条件建立全局路径,根据障碍物实时动态,对路径进行完善,实现避碰的实时有效性.在建立环境模型的过程中,首先将静态障碍物膨化处理,采用A*算法获取全局路径,根据动态障碍物的运动趋势修改完善规划路径,从而实现实时避碰.当运动障碍物的信息数据不能有效获取时,采用最后一层规避方式,即反应式短期危险规避.
2水面无人艇局部避碰算法
目前,在解决水面无人艇局部避碰问题时众多学者将智能算法应用到局部避碰过程中,有些方法考虑了无人艇的操纵运动特性和外界环境的干扰,在环境模型的建立过程中有利用航海助航仪器进行环境识别,并通过仿真验证避碰的有效性.
Almeida等[16]利用航海仪器、传感器等探测障碍物,根据障碍物距离进行危险等级划分,加以避碰.在研究过程中,通过摄像机获取外界环境信息,输入“C&C”框架进行处理,实现无人艇局部避碰.
马闯等[17]基于改进的VFH(vector field histogram)算法,实现了无人艇在三维空间内的实时避碰,在环境建模过程中利用双层声呐获取障碍物的信息.Liao等[18-19]提出了综合运用全局路径规划和局部避碰而建立的混合路径,对无人艇进行避碰规划,并取得了一定的成果.
文献[20]提出了3种基于轨迹规划的障碍物规避方法.方法一,以障碍物的边缘为界限进行路径规划;方法二,考虑外界环境的影响,当外界环境影响了水面无人艇路径规划,将进行修正再规划;方法三,将启发式A*算法与局部边界最优规划相结合,利用博弈树搜索方法获得位置.在进行无人艇避碰过程中考虑海浪对船体的影响,并且当周围存在多个障碍物时,避碰原则为碰撞危险度最低.
Aaron等[21]提出了基于标准和规则的水面无人艇避碰方法.该方法首先制定了一组候选避碰策略,根据时变环境水域特征等外界条件选择不同的速度或转向措施.制定出的多种避碰策略,要求其满足相关的规则和标准,这里的规则是指根据目标的避碰优先权高低来确定避碰准则.
Glotzbach等[22]提出了一种应用于异构水面无人艇编队避障的方法.文中所介绍的避碰方式有2种:(1) 保持原有队形避碰,重新规划路径;(2) 重构队形避碰,以“一”字队形穿越障碍物群.
文献[23-24]提出了基于速度障碍法的水面无人艇避碰方法.首先建立了速度空间坐标系,水面无人艇在航行过程中避免进入速度重叠空间即可安全通过.文章结合国际海上避碰规则(COLREGS)相关内容,判断无人艇避障的方向.
文献[25]研究基于速度障碍法并考虑风浪流影响下的无人艇操纵运动特性的自主避碰算法.首先建立了无人艇和障碍物速度坐标系,通过改变无人艇速度方向使无人艇和避障物的速度不发生重叠,以此避让障碍物.该方法考虑了无人艇操纵运动特性,在避碰过程中均以无人艇作为主动避碰船舶去比让他船,并且在转向避让的过程中以最小的转向角作为一个限制条件.
卢艳爽[26]设计了一种基于速度调整法的局部避碰方法,通过调整水面无人艇在原有路径上行驶的速度和方向来避开其他运动的物体.该速度避障法融合了海事避碰规则,同时考虑外界与内部的不确定性,对获取的信息进行了不确定建模.
Benjamin等[27]利用多目标优化区间规划方法解决无人艇的避碰问题.方法融入多目标最优化、间隔规划、行为控制框架原理,在满足相关的航行约束条件同时,实现多任务的同步.
Jacoby等[28-29]等建立障碍物预估区域,估计障碍物的将来位置,根据障碍物和水面无人艇的位置关系建立局部环境模型,并且以转弯半径和角速度作为限制条件进行可航路径搜索.
文献[30]利用了基于视觉探测方法,实现水面无人艇海面上多障碍物探测和定位,探测范围为30~100 m距离内,并且通过卡尔曼滤波对障碍物下一步可能的运动轨迹进行估计,然后采取措施避碰.
唐平鹏等[31-32]根据水面无人艇运动学特征和基础控制特性提出一种局部危险规避算法,采用分层策略将动态窗口分解为指向窗口和线速度窗口,使用切线法和弧线法分别从指向窗口和线速度窗口中求出规避角速度和线速度,并引入角速度缓冲模型以提升无人艇在航行避碰过程中的稳定型.以无人艇偏航角和速度为优化目标,以最小回转半径和障碍物动态为约束条件,将多目标问题转化为单目标优化问题,通过快速搜索水面无人艇的动态窗口获取无人艇规避策略.
杜开君等[33]针对水面无人艇对探测到的电子海图上没有标示的动态障碍物的规避问题,提出符合国际海上避碰规则公约的规避方法,将动态障碍物某一运动时刻转换为相对无人艇瞬时静止的状态,对避障模型进行实时计算;并通过粒子群优化算法解算出无人艇进行避障所需的最优航速和航向改变量.
吉大海等[34]针对高速水面无人艇提出了一种基于行为的动态危险规避算法.首先对水面无人艇的运动性能进行分析,并获得基本运动特性,采用碰撞锥理论对水面无人艇与障碍物之间的情况进行判定,将海事规则约束和碰撞约束转换为水面无人艇基于行为的约束,通过求解基于偏航角度和速度的优化问题获得水面无人艇最优规避行为.
庄肖波等[35]提出基于蚁群算法(ACA)实现高速无人艇对运动目标避碰的方法,该方法把避碰、路径最短和航迹跟踪等约束条件映射为目标函数,使得路径搜索过程快速高效.
3结论
本文针对水面无人艇的避碰问题,从全局路径规划和局部避碰的角度,综述了国内外主要的研究成果,总结如下.
1) 全局路径规划在研究水面无人艇全局路径规划的过程中,主要采取利用可视图法、遗传算法、模糊算法、势场法、粒子群优化算法、Dijkstra算法和A*算法等规划安全可航路径,并且在一些规划的约束条件中,融入了《国际海上避碰规则》相关条款.同时,在原有的智能算法的基础上,进行改进优化,使得规划时间缩短,规划路径更加可行.但是,目前提出的路径规划算法较多没有将无人艇操纵运动特性以及外界风浪流的影响作为约束条件,往往规划出的路径较为理想,与水面无人艇实际航行轨迹有一定的差别.
2) 局部避碰多基于航海助航仪器进行水面无人艇航行环境信息提取,并且一些研究方法考虑了外界环境对无人艇航行过程中的操纵避让的影响,利用速度障碍法、动态窗口法、蚁群算法等对动态船舶及静态物标进行避让.但是,局部避碰没有全局路径规划的前提约束,往往容易造成避让过大偏航后无法及时恢复原航线,不能沿最短最优路径航行至目标点.
目前,有许多水面无人艇全局路径规划和局部避碰的方法,虽然有些方法做了较完整的证明,并通过仿真试验验证算法的可行性.但目前仍存在许多实际应用困难,并且方法还不够成熟,因此很难在实际操作中得到应用.
根据目前研究的现状以及未来的发展趋势,在研究过程中,笔者建议对以下几个方面开展深入探讨.
1) 考虑水面无人艇操纵运动特性,结合《国际海上避碰规则》的水面无人艇全局路径和局部避碰综合研究.
在水面无人艇航行前规划水域全局可航路径,在航行过程中进行局部避碰,并且在水面无人艇避碰过程中,考虑水面无人艇操纵运动特性,以《国际海上避碰规则》作为避碰行为的约束条件之一.避碰结束后,水面无人艇能够实现航迹恢复,确保水面无人艇不偏离规划路径继续安全航行.
基于以上条件进行避碰仿真,能够更有效、更真实的反映出在外界环境影响下的水面无人艇避碰效果,更符合水面无人艇实际航行避碰情况,同时对研究水面无人艇复杂水上环境中避碰问题更具有实际应用价值.
2) 结合水域复杂度研究水面无人艇避碰研究
水域复杂度[36]是水域环境复杂程度的指标,以本船与其他船舶相对距离、最小会遇距离(DCPA)和最小会遇时间(TCPA)等为主要参数,反应本船与他船及周围环境危险程度.基于水域复杂度模型研究水面无人艇避碰技术,不仅能衡量多船之间的相互影响趋势,同时能够更好地为水面无人艇描述周围的交通态势,还能构建船舶之间危险区域,进而寻找到水面无人艇的避碰路径.
参 考 文 献
[1]王敏捷.USV自适应局部危险规避方法研究[D].哈尔滨:哈尔滨工程大学,2012.
[2]付岩.智能水下机器人全局及局部路径规划技术研究[D].哈尔滨:哈尔滨工程大学,2004.
[3]陈超,唐坚.基于可视图法的水面无人艇路径规划设计[J].中国造船,2013(1):129-135.
[4]陈超,耿沛文,张新慈.基于改进人工势场法的水面无人艇路径规划研究[J].船舶工程,2015(9):72-75.
[5]SOLTAN R A, ASHRAFIUON H, MUSKE K R. State-Dependent trajectory planning and tracking control of unmanned surface vessels[C].2009 American Control Conference Hyatt Regency River Front, St. Louis, MO, USA June10-12,2009:3597-3602.
[6]张玉奎.水面无人艇路径规划技术研究[D].哈尔滨:哈尔滨工程大学,2008.
[7]饶森.水面无人艇的全局路径规划技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[8]庄佳园,万磊,廖煜雷,等.基于电子海图的水面无人艇全局路径规划研究[J].计算机科学,2011,38(9):211-219.
[9]吴博,文元桥,肖长诗.一种内河海事无人艇路径规划算法设计与仿真[J].计算机工程与应用,2013,49(14):241-246.
[10]庄佳园,苏玉民,廖煜雷,等.基于航海雷达的水面无人艇局部路径规划[J].上海交通大学学报,2012,46(9):1371-1375.
[11]庄佳园,张磊,孙寒冰,等.应用改进随机树算法的无人艇局部路径规划[J].哈尔滨工业大学学报,2015(1):112-117.
[12]KIM H, KIM D, SHIN J, et al. Angular rate-constrained path planning algorithm for unmanned surface vehicles[J]. Ocean Engineering,2014,84:37-44.
[13]CAMPBELL S, NAEEM W, IRWIN. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J]. Annual Reviews in Control,2012,36(2):267-283.
[14]LIU Yuanchang,RICHARD B. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Ocean Engineering,2015,97:126-144.
[15]CASALINO G, TURETTA A, SIMETTI E. A three-layered architecture for real time path planning and obstacle avoidance for surveillance USVs operating in harbour fields[C]. Oceans 2009-Europe, 11-14 May,2009:1-8.
[16]ALMEIDA C, FRANCO T, FERREIRA H. Radar based collision detection developments on USV ROAZ II[C]. Oceans 2009-Europe,11-14 May,2009:1-6.
[17]马闯,殷波,马文帅.水上机器人三维实时避障算法研究[J].机器人技术,2009,25(32):235-237.
[18]LIAO Yulei, PANG Yongjie, WAN Lei. Combined speed and yaw control of underactuated unmanned surface vehicles[C].International Asia Conference on Informatics in Control, Automation and Robotics-CAR. Wuhan: IEEE Computer Society,2010:157-161.
[19]CACCIA M, BIBULI M, BONO R. Basic navigation, guidance and control of an unmanned surface vehicle[J]. Auto Robot,2008,25:349-365.
[20]PETR S, MAX S, ATUL T, et al. Trajectory planning with look-ahead for unmanned sea surface vehicles to handle environmental disturbances[C].2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September,25-30,2011,San Francisco,CA, USA:1154-1159.
[21]AARON T, WONG C W, TIMOTHY J T. Criteria and rule based obstacle avoidance for USV[C]. Waterside security conference (WSS), 2010 International,3-5Nov.2010:1-6.
[22]GLOTZBACH T, SCHNEIDER M, JACOBI M. Obstacle avoidance for multiple unmanned marine vehicles (mumvs) in close formation[C].Oceans 2009-Europe,11-14May,2009:1-10.
[23]YOSHIAKI K, MICHAEL T, DIMITRI Z, et al. Safe maritime navigation with colregs using velocity obstacles[C]. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30,2011:4728-4734.
[24]庄佳园,张国成,苏玉民,等.水面无人艇危险规避方法[J].东南大学学报,2013,43(1):126-130.
[25]吴博,熊勇,文元桥.基于速度障碍原理无人艇自动避碰算法研究[J].大连海事大学学报,2014,40(2):57-60.
[26]卢艳爽.水面无人艇路径规划算法研究[D].哈尔滨:哈尔滨工程大学,2010.
[27]BENJAMIN M R, CURCIO J A, LEONARD J A., NEWMAN P M. Navigation of unmanned marine vehicles in accordance with the rules of the road[C]. IEEE International Conference on Robotics and Automation ICRA 2006, May 15-19,2006:3581-3587.
[28]JACOBY L, MICHAEL B, RYAN H, et al. Advances in autonomous obstacle avoidance for unmanned surface vehicles[C]. AUVSI Unmanned Systems North America 2007, August 6-9,2007.
[29]JACOBY L, MICHAEL B.Autonomous navigation and obstacle avoidance for unmanned surface vehicles[C]. SPIE Unmanned Systems Technology VIII.Orlando ,USA,2006.
[30]WANG Han, WEI Zhuo, WANG Sisong, et al. A vision-based obstacle detection system for unmanned surface vehicle[C].2011 IEEE 5th International Conference on Robotics, Automation and Mechatronics (RAM).2011:364-369.
[31]唐平鹏,张汝波,史长亭,等.水面无人艇分层策略局部危险规避[J].应用科学学报,2013(4):418-426.
[32]唐平鹏,乔梁,张汝波.水面无人艇近程反应式危险规避方法研究[J].华中科技大学学报(自然科学版),2011(2):400-402.
[33]杜开君,茅云生,向祖权,等.基于海事规则的水面无人艇动态障碍规避方法[J].船海工程,2015(3):119-124.
[34]吉大海,杨溢,戴捷,等.高速水面无人艇动态障碍物危险规避算法[J].应用科技,2014(3):40-45.
[35]庄肖波,齐亮.高速无人艇动目标避碰规划方法研究[J].舰船电子工程,2008(12):95-97.
[36]黄亚敏.水上交通复杂性测度研究[D].武汉:武汉理工大学,2014.
Review and Expectation on Collision Avoidance Method of Unmanned Surface Vessel
WU Bo1,2)WEN Yuanqiao1,2)WU Bei3)ZHOU Siyang4)XIAO Changshi1,2)
(SchoolofNavigation,WuhanUniversityofTechnology,Wuhan430063,China1)(HubeiKeyLaboratoryofInlandShippingTechnology,Wuhan430063,China)2)(WuhanMaritimeSafetyAdministration,Wuhan430000,China)3)(WuhanSecondShipDesignandResearchInstitute,Wuhan430000,China)4)
Abstract:Because of small size, fast speed, good invisibility and high intelligence, the Unmanned Surface Vessel (USV) is widely used in the world. Along with the continuous improvement of its application value, the USV has increasingly become the focus of the domestic and foreign research. As one of the core technologies for the USV, collision avoidance technology is an important premise to ensure ship navigation safety and to perform normal tasks. In this paper, according to the collision avoidance problem of the USV, the main research achievements at home and abroad is expounded and some problems of USV collision avoidance methods are summarized from the view of USV global path planning and local collision avoidance. In addition, the future research directions are discussed.
Key words:unmanned surface vessel (USV); collision avoidance method; global path planning; local collision avoidance
收稿日期:2016-02-09
中图法分类号:U675.5
doi:10.3963/j.issn.2095-3844.2016.03.013
吴博(1988- ):男,硕士,助理实验师,主要研究领域为水面无人艇智能仿真避碰、船舶控制
*国家自然科学基金项目资助(51579204)