巡检机器人自主充电对接控制方法
2016-06-28吴功平杨智勇
吴功平, 杨智勇, 王 伟, 郭 磊, 胡 健, 周 鹏
(武汉大学 动力与机械学院, 武汉 430072)
巡检机器人自主充电对接控制方法
吴功平, 杨智勇, 王伟, 郭磊, 胡健, 周鹏
(武汉大学 动力与机械学院, 武汉 430072)
摘要:为保证轮臂复合式巡检机器人与太阳能充电基站充电座能准确和可靠自主充电对接,提出一种基于位置关系粗定位、视觉伺服精定位、以及压力传感器接合反馈的自主充电对接控制方法. 通过感知机器人所处地线坡度信息,将安装在机器人压紧机构的充电插头运动至安装在悬垂C型挂板底端中心部位的充电座附近;根据图像空间充电座中心棱边与成像区域中心线距离来表征图像特征的变化,设计充电精定位伺服控制律,采用变论域模糊控制方法进行精确定位控制;依据贴合在正负电极片下压力应变片传感器信号变化反馈对接状态. 模拟线路和实际线路的试验运行结果表明,该方法具有准确、可靠、效率高的特点,能够满足自主充电对接的任务要求.
关键词:视觉伺服;自主对接;巡检机器人;架空输电线路;模糊控制
巡检机器人是实现电力系统巡检作业自动化的重要工具之一[1-3]. 由于高压输电线路多分布在野外,跨越山川湖泊,机器人巡检过程中更换电池比较困难,从而限制了巡检机器人的广泛应用[4]. 为实现巡检机器人全线路自主巡检,能量补给是亟需解决的关键问题之一. 目前,高压输电线路在线能量补给的主要方式有太阳能充电[5]、感应取电[5-6]等. 为减轻搭载在机器人上取电装置负载重量,目前多采用在杆塔上搭建太阳能充电基站的方式为机器人提供能量. 巡检机器人从太阳能充电基站获取能量,面临着机器人充电插头与太阳能充电座充电定位与对接的问题. 机器人运行在柔性悬链线结构的地线[7]上,存在因地线坡度变化造成充电插头与充电座定位困难的问题,再加之高空风载使机器人绕地线产生偏转,从而加大充电定位与对接难度. 目前,国内外对充电定位与对接已开展了许多研究,Cassini等[8]设计了一种通过光线束引导机器人与充电站进行自主充电的方法,该方法适合在室内光强影响较小的环境. Yuta等[9]使用导航系统,利用已知环境地图引导机器人与充电站对接,实现机器人自主充电, 但存在一旦环境地图受到破坏,机器人将失去寻找目标的缺点,并限制了移动机器人的灵活性. Nourbakhsh等[10]和Silverman等[11]采用视觉系统与信标对充电目标进行定位充电,但两者均要求充电插针必须对正窗口的支点,定位精度要求较高. 郝宗波等[12]使用激光传感器、PTZ彩色摄像机和里程计来引导机器人进行自主充电,但没有进行充电装置设计,对接容忍度过小,容易导致充电失败. 林丹等[13]提出以返回固定充电座为目标的自主返回路径规划策略,该方法需要求机器人具有先验知识,不适用于机器人在周围环境复杂的柔性悬链线结构地线上充电定位对接.
本文采用基于坡度信息的位置关系粗定位,通过充电插头与充电基站充电座之间的相对位置关系,将充电插头运动至充电座附近,使充电座进入安装在压紧轮支架上的摄像头视野范围内;通过图像处理提取充电座中心棱边与成像区域中心线截距特征值,伺服控制机器人收展臂运动,以达到充电定位精确定位的目的;结合机器人的控制经验,采用变论域模糊控制方法实现机器人充电对接过程中执行机构伺服控制,并根据压力应变片传感器信号变化反馈充电对接结合状态. 通过模拟线路试验和实际线路的现场运行,验证了该方法的正确性和有效性.
1巡检机器人充电系统
1.1巡检机器人太阳能充电系统
巡检机器人采用轮-臂-夹持器复合的双臂悬挂移动机器人机构. 图1(a)为太阳能充电基站与机器人示意图,该机构共有4个自由度,其中,行走关节I为虚绞;回转关节IV和VI分别为两个机械臂绕铅垂轴的回转关节;移动关节V为双臂相对机体的移动,两臂收拢称为收臂运动,两臂张开称为展臂运动. 4个关节可执行动作为:行走关节I实现巡检机器人相对地线的滚动;移动关节V实现双臂相对地线的蠕动爬行;回转关节IV和VI提供变曲率仿形运动;为了实现巡检机器人的蠕动爬行功能和提高爬坡能力,在每个臂上各增加一对压紧轮,由有限约束回转副II实现压紧轮的均压运动,为充电插头与充电座对接的自适应调整提供支持. 由移动副III和VII提供压紧轮的压紧和松开运动.

1—地线;2—后臂;3—后臂压紧轮;4—锂电池;5—机体;6—二维倾角传感器;7—摄像头;8—前臂压紧轮支架;9—前臂压紧轮;10—前臂;
11—充电插头;12—充电座;13—悬垂C型挂板;14—控制箱;15—太阳能电池板;16—蓄电池;17—充电座正电极片;18—充电插头正电极片;
19—正电极片压力应变片传感器;20—负电极片压力应变片传感器;21—充电插头负电极片;22—充电座负电极片;
(a)太阳能充电基站与机器人示意(b)充电座与充电插头示意
图1巡检机器人太阳能充电系统
太阳能充电基站采用太阳能电池板将太阳能转化为电能,存储到蓄电池,由蓄电池向机器人锂电池充电的取能方案. 在图1(a)中,太阳能充电基站由太阳能电池板15、控制箱14、蓄电池16、充电座12组成,充电座安装在悬垂C型挂板13正下方;充电插头11安装在前臂压紧轮9上,摄像头7安装在前臂压紧轮支架8上,充电插头、摄像头的中心面与前臂10中心面在同一平面. 图1(b)为充电座与充电插头细节示意图,充电座12“︿”形两斜面上分别安装正电极片17和负电极片22;充电插头由正电极片18、正电极压力应变片传感器19、负电极片21和负电极压力应变片传感器20构成. 正负压力应变片传感器分别贴合在正负电极片的下方,当充电插头与充电座对接完成后,正负电极片因充电插头与充电座相互作用产生形变,正负压力应变片传感器信号发生变化.
1.2机器人充电对接的运动规划
机器人检测到自身电压低于设定的阈值时,将在就近的充电基站处进行充电,完成能量补给. 图2为机器人充电对接运动规划流程图,机器人前臂压紧轮碰检悬垂C型挂板,初步确定充电基站充电座的所在位置,如图2(a)所示; 机器人两臂收拢,为机器人充电定位预留运动空间,此时,前臂压紧轮处于压紧状态,固定不动,如图2(b)所示;前臂压紧轮松开到松开极限位置,如图2(c)所示;充电定位运动过程中,后臂压紧轮压紧,后臂固定不动,前臂完成充电插头与充电座的定位运动,如图2(d)所示;充电对接完成后,机器人开始充电,如图2(e)所示.

(a)前臂碰检C型挂板 (b)两臂收拢 (c)前臂压紧轮松开 (d)充电定位 (e)充电对接
2巡检机器人自主充电的定位与对接策略
将充电定位过程分为基于坡度信息位置反馈粗定位和基于图像处理的视觉伺服精定位两个过程,通过压力应变片传感器信号变化反馈机器人自主充电对接接合状态,有效保证充电对接过程安全自主运行. 图3为机器人充电的定位与对接流程图.
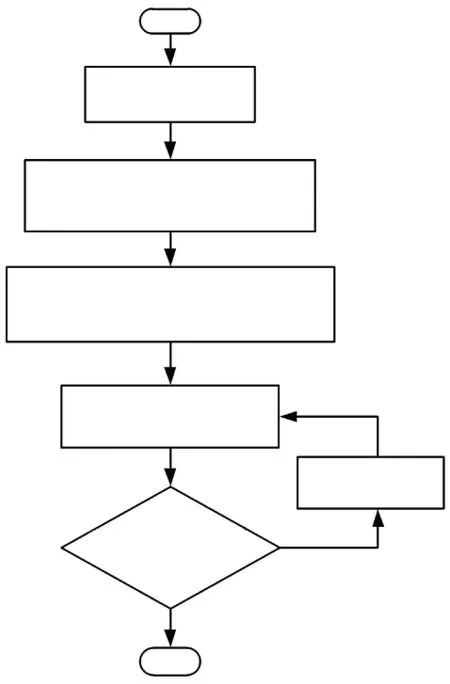
图3 机器人充电的定位与对接流程
2.1自主充电定位
2.1.1基于坡度信息位置反馈粗定位
由于架空地线为悬链线结构,杆塔附近地线均有一定的坡度,故将杆塔附近地线段简化为有一定坡度的刚性斜杆. 图4为机器人自主充电粗定位位置关系,虚线位置为充电定位理想位置,机器人前臂中心面通过充电座中心棱边,充电插头中心面亦通过充电座中心棱边. 机器人前臂碰检C型挂板后运动到虚线位置的展臂距离为
AB=AE+EB=0.5(LCcosθ+Lj).
式中:θ为C型挂板处地线坡度;LC为C型挂板两挡板间的距离;Lj为前臂压紧轮的宽度.
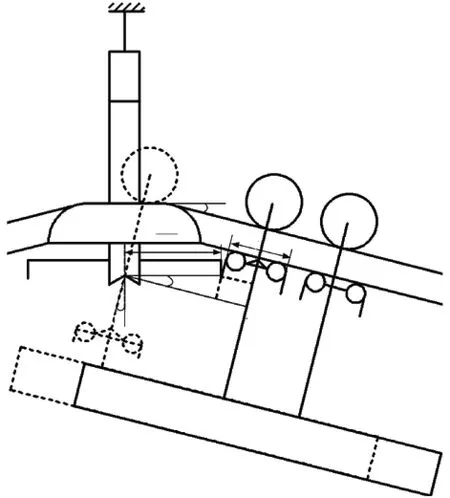
图4 机器人粗定位位置关系
由于实际地线为柔性的悬链线,通过现场实验数据分析,机器人在展臂过程中机器人角度有1°左右变化;展臂距离EB近似计算为机器人压紧轮宽度的一半;展臂机构运行存在误差,该方式只能作为机器人充电定位的粗定位.
2.1.2基于图像处理的视觉伺服精定位
机器人充电粗定位完成后,充电座进入安装在压紧轮支架摄像头视野范围内. 当充电插头与充电座定位不精确时,一方面,容易引起对接结构间的不良约束力,损坏充电座与充电插头;另一方面,容易出现充电接触不良,产生放电电弧,损坏机器人与充电基站的部件,造成额外能量消耗. 因此,自主充电定位需进行精定位. 通过摄像头获取充电基站充电座图像信息,对采集的图像进行预处理与特征计算[14],结合运动算法推理,控制机器人展臂或收臂运动,达到机器人充电精确定位的目的.
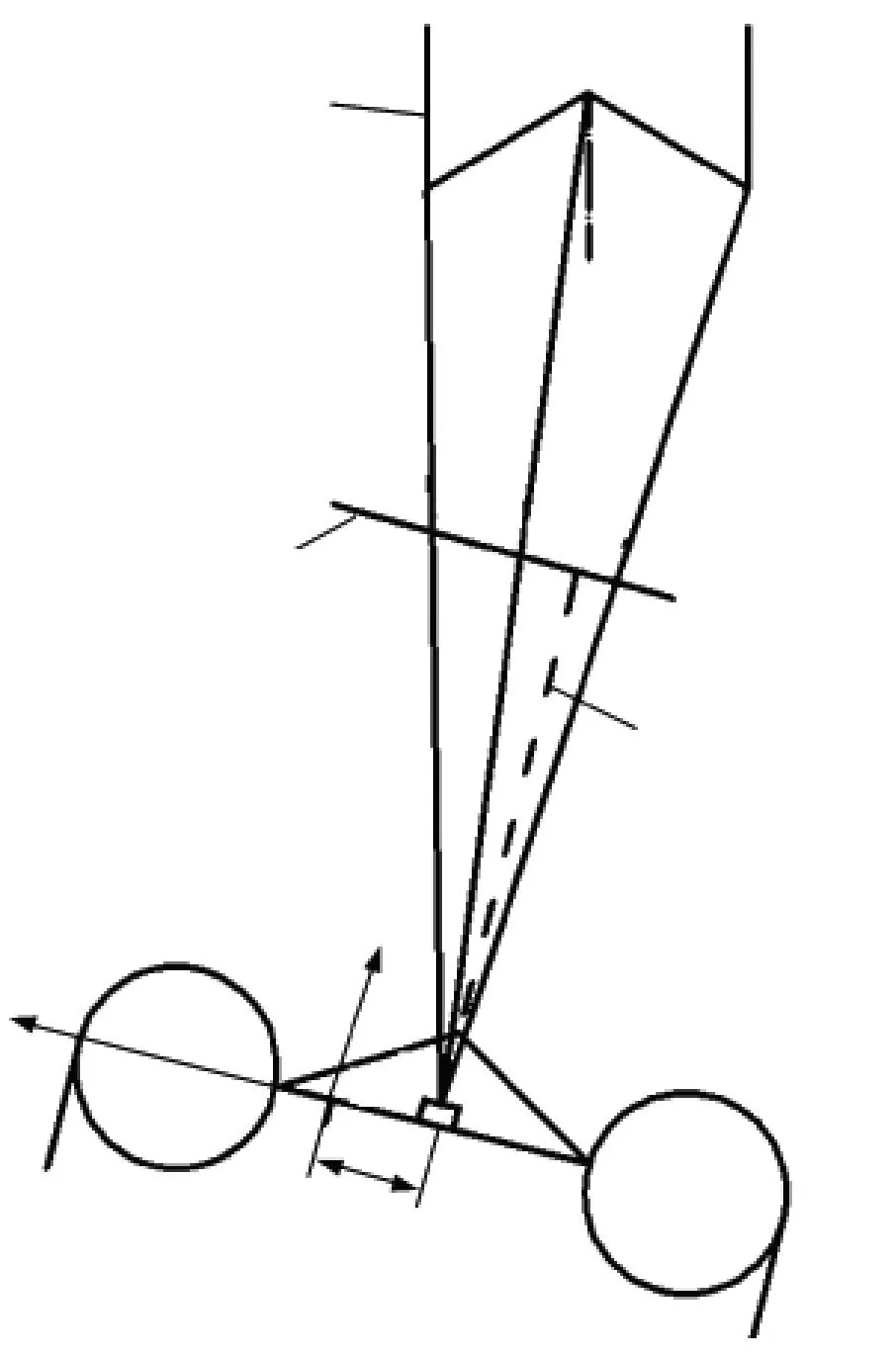
摄像头安装在前臂压紧轮支架上,其视野中心面与前臂中心面在同一平面上,充电插头与充电座对准时,摄像头视野中心面通过充电座中心棱边,充电座中心棱边在成像面投影与成像区域中心线重合;图5为视觉精定位充电座成像关系模型,图5(a)中,充电座左棱边BB1,中心棱边AA1,右棱边CC1在成像面上的投影分别为B′B1′、A′A1′、C′C1′,视场中心面与成像面的相交线ef为摄像头成像区域中心线,以充电插头与充电座对准时摄像头焦点为原点o′,建立坐标系{x′o′y′},x′轴正方向为机器人展臂方向,负方向为收臂方向,y′轴为对准时摄像头光轴,当充电插头与充电座对准时,充电插头与y′轴的距离D为0;图5(b)为精定位充电座成像示意图,abcd为摄像头成像区域,以成像区域中心点o为原点,建立坐标系{xoy}. 可知充电插头与充电座对准时,A′A1′与ef距离dk为0.

(a)视觉精定位成像关系模型
当充电插头与充电座非对准时,摄像头视场中心面不通过充电座中心棱边AA1,充电座中心棱边在成像面投影A′A1′与成像区域中心线ef之间距离dk不为0. 图(6)为充电插头相对充电座非对准成像关系模型,充电插头相对于充电座左偏距离D,其成像关系如图6(a),D>0,充电座成像示意图如图6(b),dk>0;充电插头相对充电座右偏距离D,其成像关系如图6(c),D<0,充电座成像示意图如图6(d),dk<0. 根据小孔成像原理,可知偏移量D与dk存在如下关系:
(1)
式中n为成像比例系数. 由式(1)可知,若获取图像中充电座中心棱边到成像区域中心线距离dk的特征值,就可知充电插头相对于充电座偏移方向和偏移量,通过机器人收臂或展臂运动,将dk趋近于0,伺服控制充电插头与充电座精确定位.

(a)充电插头相对于充电座左偏成像关系

(b)充电插头相对充电座左偏时充电座成像示意
(c)充电插头相对于充电座右偏成像关系
(d)充电插头相对充电座右偏时充电座成像示意
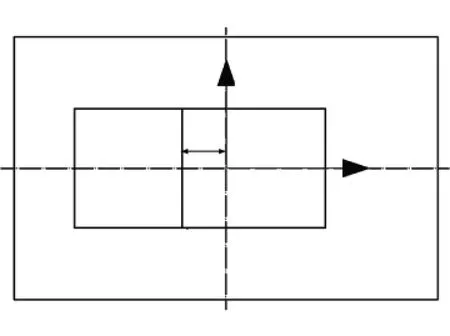
定义1截距dk为图像区域内充电座中间棱边A′A1′与中心线ef之间距离,单位为像素. 规定dk>0时,充电插头相对于充电座左偏;dk<0时,充电插头相对于充电座右偏.
定义2对于地线坡度θ,充电精定位后,充电插头相对于充电座左偏最大容许度所对应的截距为Cl(θ),右偏最大容许度所对应的截距绝对值为Cr(θ),取临界值ξθ=min(Cl(θ),Cr(θ)).
2.2自主对接
机器人自主充电精定位完成后,前臂压紧轮向上运动,充电插头与充电座进行充电对接. 为避免充电插头与充电座接触不良造成机器人不能正常充电,通过压力应变片传感器信号变化来检测充电对接的状态,并控制前臂压紧轮是否继续压紧.

(2)
则认为充电对接完成,前臂压紧轮停止向上压紧.
3充电对接精定位变论域模糊控制器设计
由于充电对接装置存在加工误差,对接过程中机器人存在打滑现象,以及机器人作业环境为柔性悬链线结构等因素影响,截距dk趋近零的精定位控制模型呈现非线性特征. 为使系统在遇到不确定因素或参数未知时保持既定的特性,采用变论域模糊控制方法. 该方法实时评价偏差及偏差变化率,并调整模糊控制器的模糊划分,实现模糊系统的自适应变化,克服专家经验不足造成控制精度不够的问题[15-17], 适用于机器人充电定位精定位的控制.
变论域模糊控制器由两部分组成,将截距dk的偏差e与偏差变化率ec作为控制器的输入量,收展臂电机运动位置量u作为输出量,形成主控制器,同时将偏差e与偏差变化率ec作为伸缩因子模糊控制器的输入,输入及输出伸缩因子α1、α2、α3作为控制器输出量,成为主控制器的伸缩因子. 构建系统控制框图如图7所示.
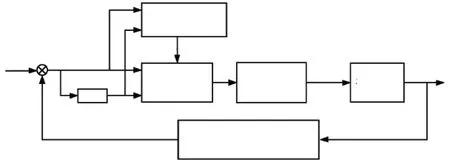
图7 变论域模糊控制系统框图
3.1伸缩因子模糊控制器设计
由于伸缩因子主要影响论域的伸缩程度,无正负区别,为从输入获得伸缩因子,将偏差e与偏差变化率ec的绝对值与各自设定范围相除,Ee和Eec分别为偏差和偏差变化率设定的论域,并取最大值作为伸缩因子模糊控制器的输入量[15]:
(3)
经过式(3)处理,伸缩因子模糊控制器成为单输入单输出模糊控制器,输入量与输出量取值范围是[0,1],描述输入变量l(t)与输出变量α(t)的模糊量语言值定为PS、PM、PB,隶属度函数均采用三角形隶属度函数,得到对应的模糊推理规则表见表1.
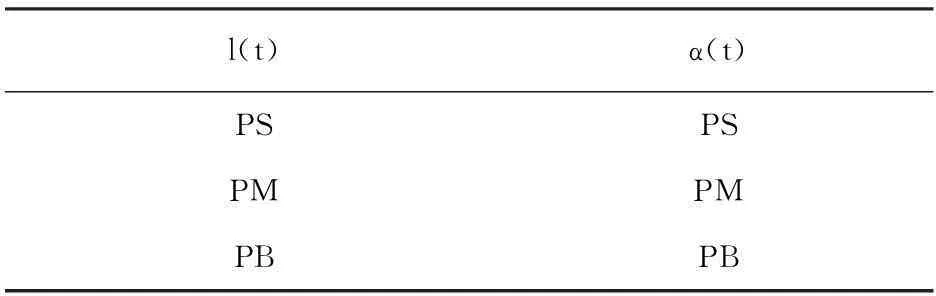
表1 伸缩因子模糊控制器推理规则表
将输出变量α(t)作为主模糊控制器输入论域的伸缩因子,输出变量比例因子为α(t)+b(b为常数),根据实验经验,取b为0.3.
3.2主模糊控制器设计
由于伸缩因子模糊控制器可根据输入值不同改变主模糊控制器的伸缩因子以及比例因子,故主模糊控制器的设计主要集中在初始论域控制器的设计. 根据偏差e与偏差变化率ec的值决定收展臂执行器移动位置增量u的大小,将偏差e与偏差变化率ec以及收展臂执行器移动位置增量u的模糊量语言值均设置为7档,分别为:NB、NM、NS、ZE、PS、PM、PB,论域及隶属度函数如图8所示.
根据偏差e与ec情况,结合实验经验,以快速稳定为目标,制定输出变量收展臂移动位置增量的模糊推理规则如表2所示.
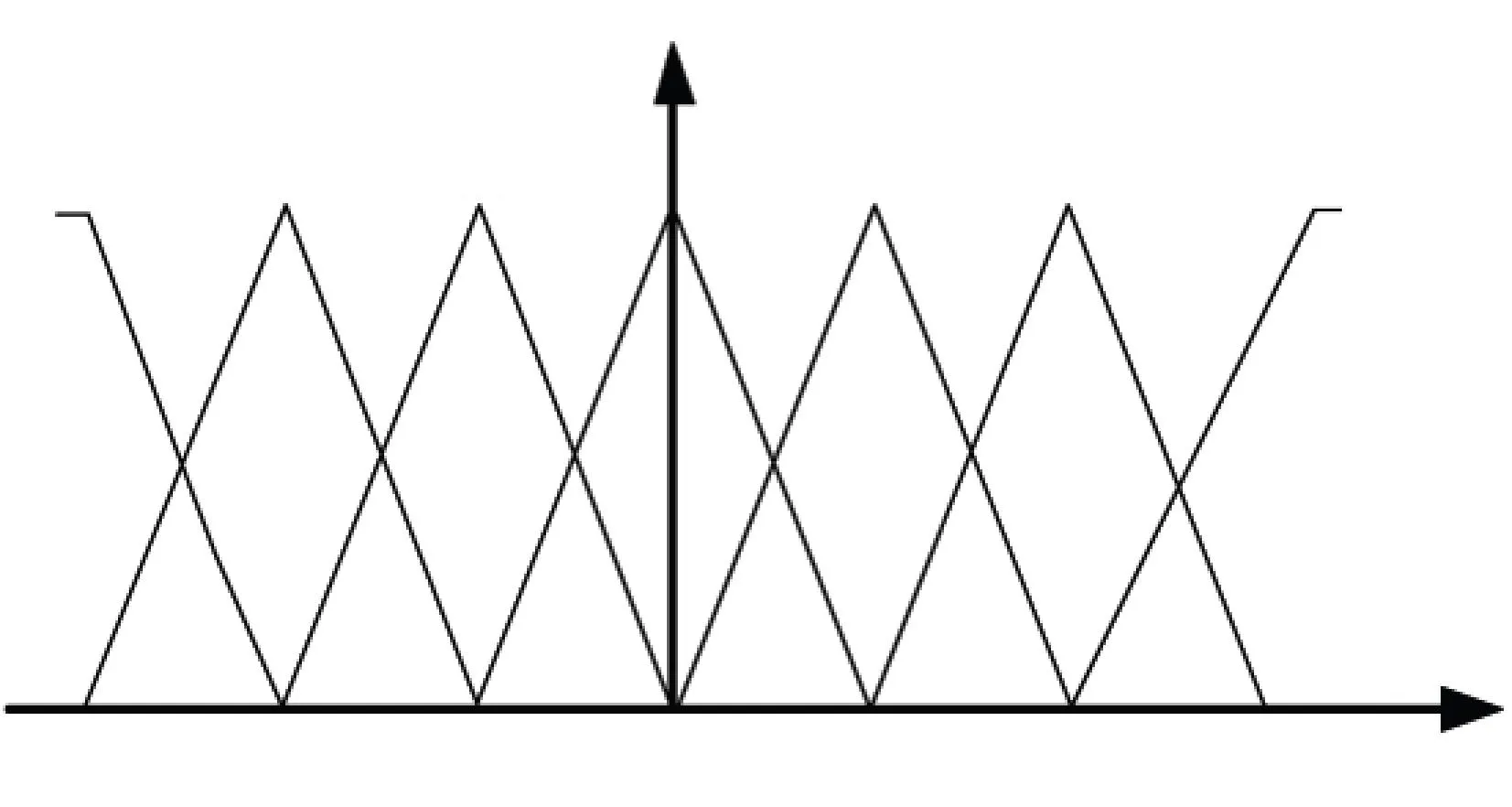
(a)e的初始论域及隶属度函数

(b)移动位置增量u的初始论域及隶属度函数
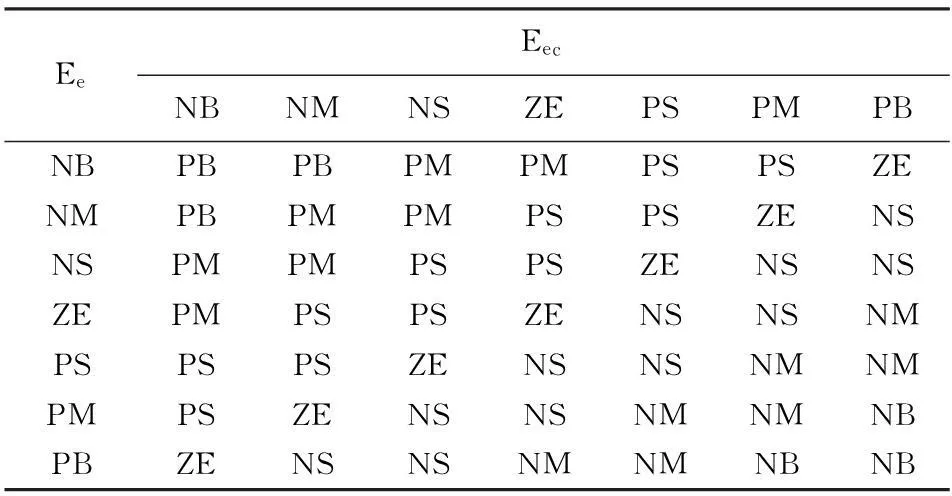
EeEecNBNMNSZEPSPMPBNBPBPBPMPMPSPSZENMPBPMPMPSPSZENSNSPMPMPSPSZENSNSZEPMPSPSZENSNSNMPSPSPSZENSNSNMNMPMPSZENSNSNMNMNBPBZENSNSNMNMNBNB
4实验与试验运行
4.1模拟输电线路试验
通过二维倾角传感器,获取地线坡度值θ和绕地线偏转角α. 考虑到充电插头与充电座结构尺寸按机器人绕地线偏转角小于45°设计,充电对接实验应实时监测偏转角α,当高于45°时停止对接. 根据无刷电机位置环进行机器人充电粗定位. 视觉控制器对摄像头采集的图像进行处理,并根据处理结果进行视觉伺服控制,运动控制器完成充电定位和对接运动控制. 依据充电基站附近实际线路坡度范围,模拟输电线坡度可在0~27°范围调整.
模拟输电线路充电对接实验过程如下:(1)机器人定位悬垂C型挂板,(2)充电粗定位,将充电座移至摄像头视野范围,(3)充电精定位,(4)充电对接. 在模拟输电线路上进行了102次充电对接实验,机器人粗定位时间随地线坡度变化曲线如图9所示,可知粗定位时间随地线坡度增大而减小,但基本维持在28 s左右. 取其中一次实验为例,地线坡度为12°,图10(a)为精定位充电座中心棱边截距dk调整曲线,可知机器人采用变论域模糊控制器完成图像视觉伺服精定位用时23 s,而使用模糊控制需30 s,因此,采用变论域模糊控制方法具有较高的效率. 图10(b)为正负压力应变片传感器信号输出变化曲线,可知充电对接共用时11.5 s,其中充电插头与充电座接合共用时3.5 s.
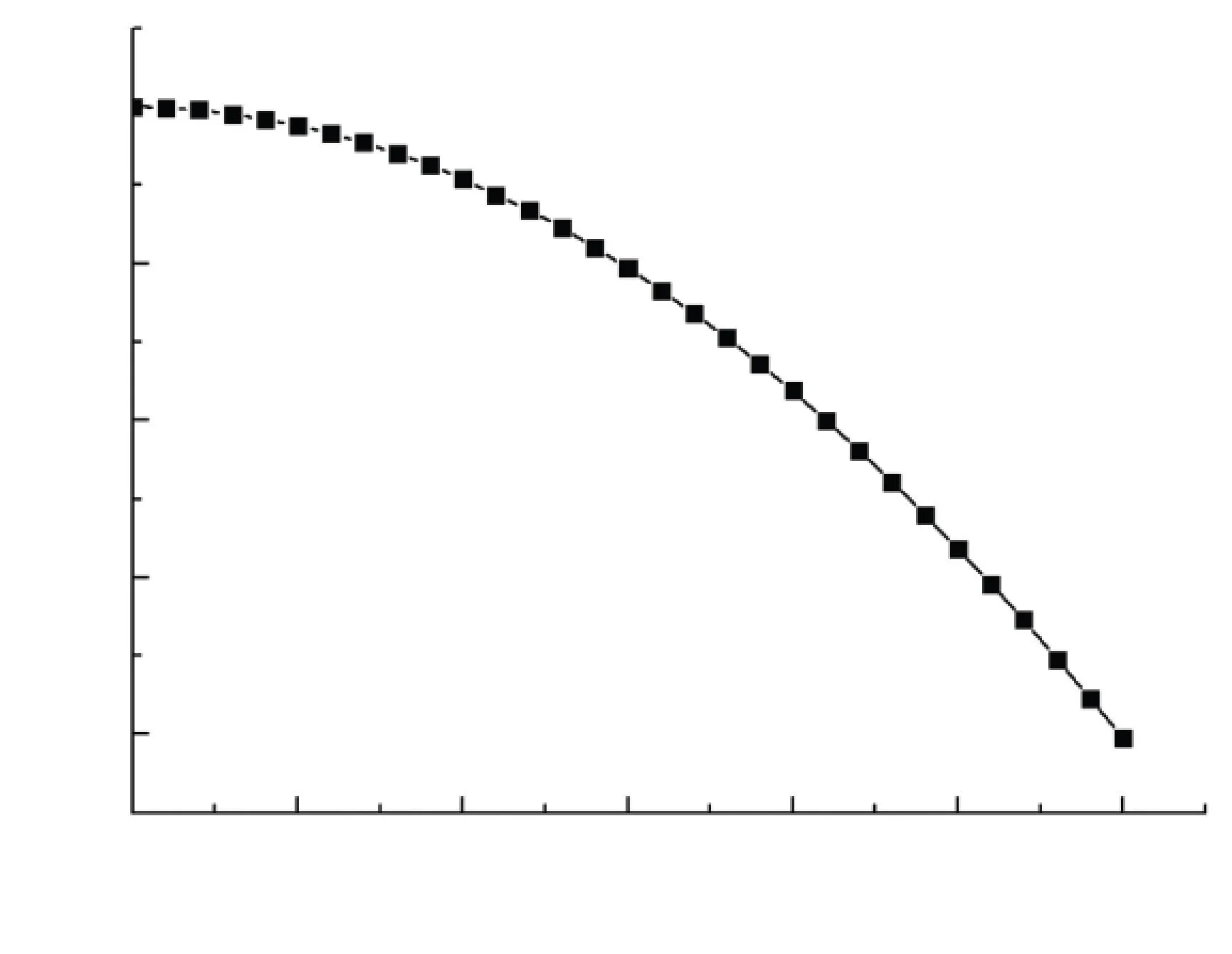
图9 粗定位时间随地线坡度变化曲线

(a)充电座中心棱边截距调整曲线

(b)正负压力应变片传感器信号采样值变化曲线
4.2现场试验
在吉林白山跨林区松长甲线#114-#156杆塔间进行试验,机器人从#114杆塔小号侧往大号侧开始运行,运行到#141杆塔(该杆塔安装太阳能充电基站)处进行自主充电对接,补充能量. 通过现场20次充电对接实验,20次充电对接成功,表3为充电对接实验结果,其中对接完成最少用时62 s,最多耗时93 s. 实验结果表明,基于坡度信息位置反馈粗定位、图像视觉伺服精定位、压力传感器对接完成的自主充电对接方法是准确可靠的.
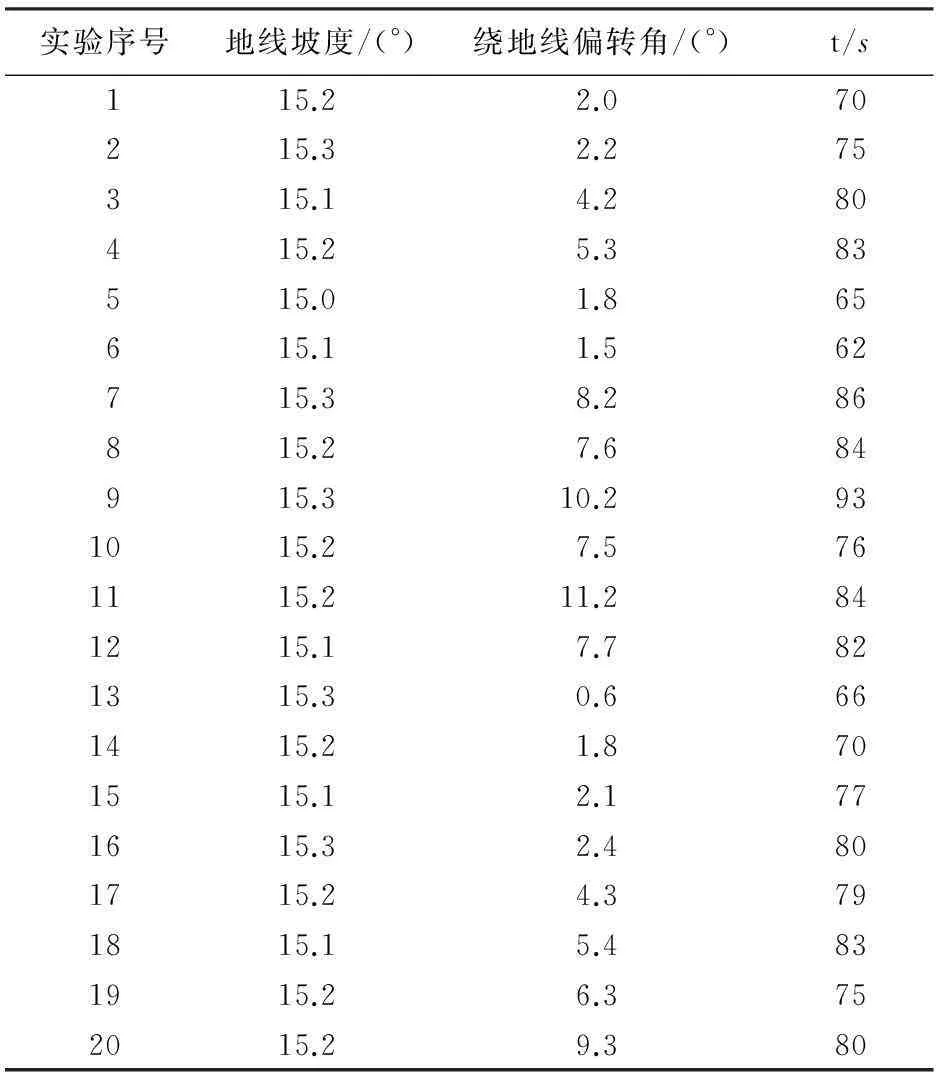
表3 充电对接实验结果
5结论
1)针对轮臂复合式巡检机器人,提出了一套基于坡度信息位置反馈粗定位、图像视觉伺服精定位、压力传感器反馈对接状态的自主充电对接控制方法.
2)粗定位将充电座移至视觉精定位的视觉检测范围;视觉伺服精定位通过提取图像中充电座中心棱边与成像区域中心线距离特征值,伺服控制收展臂电机运动,提高充电对接准确度;通过压力应变片传感器信号变化来反馈充电对接状态,确保机器人对接充电安全可靠;变论域模糊控制方法能够避免机器人在充电定位过程中因金具尺寸加工误差,收展臂运行偏差以及悬链线结构的柔性地线坡度变化对充电定位精度的影响.
3)模拟输电线路和实际线路的运行效果验证了该自主充电对接方法的正确性和有效性.
参考文献
[1] 吴功平, 肖晓晖, 肖华,等. 架空高压输电线路巡线机器人样机研制[J]. 电力系统自动化, 2006,30(13):90-93.[2] WANG Hongguang, JIANG Yong, LIU Aihua, et al. Research of power transmission line maintenance robots in SIACAS[C]//International Conference on Applied Robotics for the Power Industry. Montreal:IEEE, 2010:1-7.[3] 张运楚, 梁自泽, 谭民. 架空电力线路巡线机器人的研究综述[J]. 机器人, 2004, 26(5):467-473. DOI:10.3321/j.issn:1002-0446.2004.05.017.
[4] 周风余, 温龙旺, 苏鹏,等. 高压输电线路巡检机器人能源在线补给装置的研制[J]. 电网与清洁能源, 2010, 26(1):18-23.
[5] EMILY I N, PORTER E, AYOOB E. The design of a highly reliable robot for unmediated museum interaction[C]// International Conference on Robotics and Automation. Barcelona: IEEE, 2005:3225 - 3231.[6] 白玉成, 吴功平, 肖华,等. 输电线路感应取电装置参数匹配方法[J]. 电力系统自动化, 2010, 34(21):75-80.
[7] 孟遂民,孔伟.架空输电线路设计[M].北京:中国电力出版社,2007:67.
[8] CASSINI R, TAMPALINI F, BARTOLINI P, et al. Docking and charging system for autonomous mobile robots[J]. Massachusetts Institute of Technology, 2005, 18(4):513-524.[9]YUTA S, HADA Y. Long term activity of the autonomous robot-proposal of a bench-mark problem for the autonomy[C]// Conference on Intelligent Robots and Systems. Victoria: IEEE , 1998:1871-1878.[10]NOURBAKHSH I R, BOBENAGE J, GRANGE S, et al. An affective mobile robot educator with a full-time job[J]. Artificial Intelligence, 1999, 114(12):95-124.
[11]SILVERMAN M C, NIES D, BOYOON J, et al. Staying alive : a docking station for autonomous robot recharging[C]//IEEE International Conference on Robotics and Automation. Washington D C:[s. n.], 2002:1050-1055.
[12]郝宗波, 洪炳镕. 室内环境下移动机器人自主充电研究[J]. 哈尔滨工业大学学报, 2005, 37(7):885-887. DOI:10.3321/j.issn:0367-6234.2005.07.007.
[13]林丹. 一种室内清洁机器人返回路径规划算法[J]. 重庆科技学院学报(自然科学版), 2010, 12(1):110-113.
[14]WANGWei, WU Gongping , BAI Yucheng, et al. Hand-eye-vision based control for an inspection robot’s autonomous line grasping[J]. Journal of Central South University, 2014, 21(6):2216-2227.
[15]李力, 邹砚湖. 海底采矿车路径跟踪的变论域模糊控制[J]. 中南大学学报(自然科学版), 2012, 43(2):489-496.[16]管成, 彭华. 基于非线性函数的注塑机注射压力模糊控制[J]. 浙江大学学报(工学版), 2011, 45(8):1382-1386.
[17]LU Yongkun, XIA Chaoying. Observer-based variable universe fuzzy control with dynamic self-structure[C]//International Conference on Machine Learning and Cybernetics. Baoding: IEEE, 2009:743-748.
(编辑杨波)
On auto-docking charging control method for the inspection robot
WU Gongping, YANG Zhiyong, WANG Wei, GUO Lei, HU Jian, ZHOU Peng
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract:To guarantee the wheel-arm inspection robot auto-docks with the recharge stand of the solar charging station correctly and reliably, an auto-recharging docking control way is presented, which is based on position relation coarse positioning, visual servo precise positioning and pressure sensor joint feedback. By perceiving the slope information of the place where the robot stands, the charging plug in the pressing mechanism of the robot is moved near the recharge stand in the central bottom of the pensile C type plate. According to the distance between the central seamed edge of the docks in the image space and the central line in the imaging area, the variety of the image features is shown. Charging precise positioning servo control law is designed by adopting variable universe fuzzy control method. The docking state is fed back according to the signal variety of the pressure straingauge sensor under the positive and negative electrodes. The auto-recharging docking control way has been tested in the imitate and real routines, which proves that the method is correct, reliable and effective, and also can satisfy the docking demands of auto-recharging.
Keywords:visual servo; auto-docking; inspection robot; high voltage transmission line; fuzzy control
doi:10.11918/j.issn.0367-6234.2016.07.020
收稿日期:2015-04-29
基金项目:国家高技术研究发展计划 (2006AA04Z202);
作者简介:吴功平(1961—),男,教授,博士生导师
通信作者:王伟, whuww@whu.edu.cn
中图分类号:TP24
文献标志码:A
文章编号:0367-6234(2016)07-0123-07
国家自然科学基金 (51105281)
