基于嵌入式的农田信息采集四旋翼飞行器设计
2016-06-28田芳明骆家诚谷沛尚黑龙江八一农垦大学信息技术学院黑龙江大庆163000
王 涵 田芳明 骆家诚 谷沛尚 刘 莹(黑龙江八一农垦大学信息技术学院,黑龙江 大庆 163000)
基于嵌入式的农田信息采集四旋翼飞行器设计
王 涵 田芳明 骆家诚 谷沛尚 刘 莹
(黑龙江八一农垦大学信息技术学院,黑龙江 大庆 163000)
摘 要:农业生产中,实时对农作物的生长环境信息、作物状态信息、图像信息等进行采集是必不可少的,而当前,农作物生长监测方式大多针对点的监测,监测范围小,费时费力,不具有普遍性。本项目旨在突破单点监测方式,以STM32为主控芯片,结合GPS全球定位技术、传感器采集及电量监测技术,遥控视距内四旋翼飞行,采集目标一定范围内的地理位置、温湿度、光照及飞行器电量的信息,利用上位机显示采集数据,并生成数据文档。此无人机监测方式,在无损农作物的前提下,能够实现对农田多方位的便捷监测,弥补了当前农田环境监测方式的不足,且采集到的数据存储系统化,对农田作物生长监测具有重要意义。
关键词:农田;信息采集;stm32;飞行器
现代化农业生产中,为了提高农作物的产量与品质,实时对农作物的生长环境信息、作物状态信息、图像信息等进行采集是必不可少的。然而目前,农作物生长监测主要有监测点监测与工作人员手持移动设备监测两种方式,前者监测范围小,设定的固定点无法代表整个农田作物的生长情况,后者也是对点监测,监测麻烦、费时费力,并且很多农田环境不适宜工作人员进入特定点进行监测。目前,我国对四旋翼飞行器的研究尚处于初级阶段,虽然各高校及高新技术企业都很重视,但是四轴飞行器在农田数据监测方向的应用相对较少,而且技术并不成熟,仅仅是应用于农药喷洒等工作上。
针对以上情况,设计以无人机监测的方式采集信息,在无损农作物的前提下,能够在农田任意地点随时监测,弥补当前农田环境监测方式的不足。本设计以STM32为控制芯片,结合GPS全球定位技术、温湿度技术、光照强度采集技术及电量监测技术,通过发送特定信号监测目标点地理位置、温湿度及电量信息,并通过上位机显示温湿度曲线及光照强度,可生成数据文档,便于存储,为分析农作物生长状况提供数据支撑。
1 系统总体设计
该系统由飞行控制、环境信息采集、电量采集、显示及上位机信息监控系统等组成,具体如图1所示。
1.1 飞行器控制系统
系统选用STM32F103RCT6 处理芯片作为四旋翼飞行器的主控芯片,最高工作频率72MHz,该控制器具有丰富的内部资源,适合实时多通道数据采样与处理,实现飞行速度、角度的检测及控制。
1.1.1 加速度陀螺仪传感器
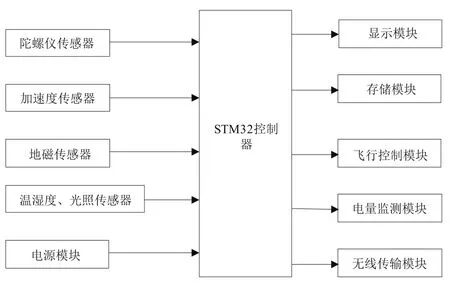
图1 系统总体设计框图
加速度测量考虑到加速度与陀螺仪之间的轴向差问题,选择了MPU6050作为触感器,该传感器具有加速度与三轴测量功能,利用I2C端口通信,输出6个轴向运动数据。
1.1.2 数字罗盘
为了适应飞行器定位飞行需求,选用HMC5883L作为数字罗盘,电路连接如图2所示,采用I2C通信方式,具有采集精度高、功耗低、工作温度范围宽等优点。

图2 HMC588L外部电路配置图
1.1.3 数字气压高度计
飞行器飞行中气压的测量选择了MS5611数字气压计,该芯片具有低功耗、I2C通信协议、稳定性好等特点。具体电路连接如图3所示。
1.2 信息采集系统
信息采集系统主要由GPS接收器模块、温湿度传感器模块、光照传感器模块组成。
1.2.1 GPS接收器模块
GPS接收机在全球定位系统中的主要功能是完成接收机所在位置的定位计算,以NMEA-0183协议报文输出。UM220-IIINV是BDS/GPS双模定位模块。低功耗GNSS SoC芯片Humbird TMUC220,是集成度高、功耗低的定位模块。
1.2.2 温湿度传感器模块
DHT11是一款含有已校准数字信号输出的温湿度传感器,它具有超快响应、抗干扰能力强、性价比极高等优点。单线制串行接口,信号传输距离可达20m以上。此模块供电电压为3V~5.5V。采用单总线数据格式,一次通信时间4ms左右,数据分小数部分和整数部分,数据传送正确时校验和数据等于“8bit湿度整数数据+8bit湿度小数数据+8bit温度整数数据+8bit温度小数数据”所得结果的末8位。
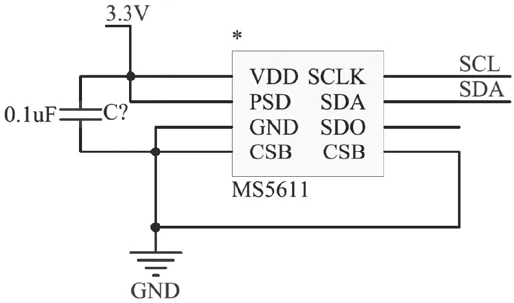
图3 MS5611外部电路配置图
1.2.3 光照传感器
GY-30采用ROHM原装BH1750FVI芯片,供电电源:3V~5V,光照度范围:0~65535lx,传感器内置16bitAD转换器,直接数字输出。
1.3 电量监测模块
飞行器飞行使用电池为充电电池,考虑到飞行过程中的可控性及安全性,需对电池电量进行实时监测。系统采用DS2762实现该功能,能够对温度、电压和电流进行测量,具体电路连接如图4所示。
1.4 上位机系统
上位机系统运用C#语言,在Visual Stdio 2012软件编写。此上位机可将SD卡中的信息进行提取,并将其进行总结生成EXCEL文件保存在电脑中。
1.5 显示系统
Thinox科技的0.96寸OLED模块采用高亮度,低功耗的OLED屏,显示颜色纯正,在阳光下有很好的可视效果。模块供电可以是3.3V也可以是5V,不需要修改模块电路,同时兼容3种通信方式:4 线SPI、3线SPI、IIC,通信模式的选择可以根据提供的BOM表进行跳选。

图4 DS2762外围电路图
2 系统运行验证
为验证此飞行器的调试状况,于2015 年10月中旬对黑龙江省某一农田进行简单信息采集,采集后将存储SD卡数据插入电脑,获得数据如图5所示,显示界面简洁清晰,便于实时查看。
结论
系统以STM32为主控芯片,结合GPS定位技术、传感器采集及电量监测技术,遥控视距内四旋翼飞行,实时采集地理位置、温湿度、光照及飞行器电量的信息并存储,利用上位机显示采集数据,生成数据文档。此无人机监测方式,在无损农作物的前提下,能够实现对农田多方位的便捷监测,有效弥补了目前农田定点监测的不足,具有较大的推广前景。
参考文献
[1]聂博文.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[2]黄敦华,朱青松.基于微小型四旋翼飞行器的目标监测与识别综述[J].机电产品开发与创新,2011,24(6):16-18.
[3]李路明,王立鼎. MEMS研究的新发展——微型系统及其发展应用的研究[J].光学精密工程,1997,5(1):67-73.
[4]周权,黄向华,朱理化.四旋翼微型飞行平台姿态稳定控制试验研究[J].传感器与微系统,2009,28(5):72-79.
[5]韩晓微,邓丰,唐劲.移动机器人导航方式的比较研究[J].沈阳大学学报,2009,21(6):4-6.

图5 上位机数据显示界面
中图分类号:V275
文献标识码:A
通信作者:田芳明。
基金项目:黑龙江八一农垦大学创新创业训练计划项目(XC2015057)。