空间目标光电跟踪中的航迹起始方法∗
2016-06-27许占伟王歆
许占伟 王歆
(1中国科学院紫金山天文台 南京 210008) (2中国科学院空间目标与碎片重点实验室 南京 210008)
空间目标光电跟踪中的航迹起始方法∗
许占伟1,2†王歆1,2‡
(1中国科学院紫金山天文台 南京 210008) (2中国科学院空间目标与碎片重点实验室 南京 210008)
针对空间目标光电跟踪中的航迹起始问题,采用修正Hough变换,提出一种无需先验信息的航迹起始算法,实现了空间目标的全自动识别与跟踪.方法可实现多目标航迹的同时起始,并且不要求连续帧.仿真表明,方法可行有效,能用于日常运行,特别适合新目标的搜索发现.
航天器,望远镜,技术:图像处理
1 引言
航迹起始是目标探测领域中一个基本问题[1],广泛应用于各种目的、各种运动目标以及各个波段的探测中,空间目标的光电探测也不例外[2].航迹起始是根据探测器获取的带有杂波和噪声的信号中提取出运动目标并确定其初始运动状态的过程.由于缺少先验信息以及虚警等并无真正规律可循,因此与航迹维持相比,航迹起始是一个十分困难的问题.
在空间目标雷达探测中航迹起始自1950年代以来由于其重要的军事价值,得到了深入开展,形成了多种航迹起始方法并应用于实际问题[3-5].尽管如此,航迹起始仍然是该领域的研究热点,没有一种普适方法可适用大多数问题,都要针对不同应用背景开展专门研究.
空间目标光电探测中由于观测需求的原因,研究主要集中在航迹维持问题[6-8],而航迹起始问题没有得到足够重视,长期以来依赖人工实现,随着设备能力提高,航迹起始问题逐渐成为限制设备运行自动化的瓶颈.文献[9]考虑到日常空间目标光电观测中,引导精度较高,通过和预报轨迹的比对提出了一种航迹自动起始方法,在中国科学院的观测网中得到广泛的应用,并取得了较好的成效.
随着空间目标探测能力的增强,近年对于新目标自动搜索跟踪已逐步成为空间目标观测的新趋势,通过凝视或者恒动方式进行巡天观测,发现新的动目标后自动转为跟踪方式;除了新发现目标外,对于已知目标也有类似问题,例如空间目标变轨后,轨道预报无法满足引导要求,过去主要依赖人工通过拦截预报方式进行捕获.解决这些问题的关键就是无预报的航迹起始.
现有工作在航迹起始方面都有较高限制,例如要求连续帧上都有相同目标,帧间隔时间相同,以及只能处理连续3帧等等.这些限制大大降低了航迹起始的效率,不同于雷达探测,光电观测更容易受到各种因素的干扰,特别是相比雷达探测,由于不可避免的恒星背景,虚警出现概率更高.
本文针对上述问题,根据Hough变换的主要思想[10],采用修正Hough变换方法[11],结合空间目标光电探测的具体情况进行优化,实现了一种无先验信息的航迹起始方法,方法要求比较宽松,不要求连续帧、等间距等,而航迹起始要求的帧数也可根据观测的具体需求自由调整.
2 H ough变换
Hough变换是图像处理中的著名方法,其基本思想是在图像空间和参数空间之间通过Hough变换方程建立起映射关系.原图像空间中的一个数据点经过Hough变换后将对应于参数空间中的一条曲线或曲面,那么图像空间中具有相同参数特征的点集变换到参数空间后形成的曲线集或曲面集将会交汇于一点.通过提取峰值即可定位出交点,再对交点进行反变换寻找出图像空间中具有相同参数特征的点集,该点集构成的图形即为所求图像空间中的图形.Hough变换理论上可检测各种图形,但由于其需要对参数空间进行遍历,计算量非常大,一般多用于2维直线的检测,此时图像空间中同一条直线上的点(xi,yi)的集合可由极坐标方式表示为:

其中ρ为原点到该直线的距离,θ为原点到直线的垂线与x轴的夹角.平面内的点经过变换后成为参数空间的一条曲线,共线点在参数空间内的曲线势必相交于1点,对参数空间采用离散化方法建立累积矩阵[12],经过Hough变换后对交点只需要经过计数投票即可实现直线的检测.
3 改进的航迹起始方法
3.1 参数空间的选择
对于光电观测,在不长的时间间隔内,空间目标的航迹投影在CCD图像平面上近似为一条直线,同时空间目标在短时间内近似作匀速运动,完整航迹是(t−x−y)空间内的一条直线.
对于3维空间内的直线虽然仍可以用Hough变换进行处理,但由于3维空间内的直线需要4个参数表示,采用传统Hough对4个参数进行遍历计算量非常大,在实时跟踪中并不实用.
为了能够唯一确定航迹,考虑到空间目标运动特点,选择航迹表达的参数空间为(ρ,θ,v),其中ρ和θ为xy平面内的直线Hough参数,表示空间目标航迹在xy平面内的投影,而和t方向相关的量用平面内速度v表示.为了便于参数空间离散化,将v分为两个参数,速率v和方向s,由于θ已反映了运动方向,s只取+或者−,取图像坐标x增大、y增大方向为+,航迹参数空间扩展为4个参数(ρ,θ,v,s),参数取值范围为:
和Hough变换类似,采用离散化的参数网格,定义各参数的网格大小为δρ,δθ,δV.由此可转化为离散化的参数.以离散化中心建立航迹矩阵P(ρn,θn,vn,s)用于投票,同时建立航迹点矩阵Q(ρn,θn,vn,s)用于记录对应航迹的点集.
这种参数的选取避免了高维Hough变换,克服了单纯平面Hough变换航迹起始的不足,也适用于共线不同速度航迹的区分.
3.2 航迹建立的判断准则
在航迹起始过程中,航迹数量会不断增加,为了减少无效航迹带来的航迹爆炸必须对航迹进行撤销.航迹撤销必然和航迹建立准则相关.
当前光电跟踪中多采用连续3帧具有相同的动目标作为航迹建立的判据,但实践中由于光电观测受到干扰因素较多,连续3帧的要求虽然保证了较高的航迹准确率,但同时增加了航迹建立的时间,在相同时间内则容易导致漏检.
在雷达目标跟踪中航迹建立一般采用n/m准则[13],n/m>0.5,n<m,即在连续的m帧中有n帧存在同一动目标,则建立航迹,常用的是在安静环境下采用2/3快速确认,一般使用3/4的标准确认准则.
在光电跟踪中也可采用类似的准则,但与雷达观测不同,光电观测由于有恒星背景,采用2/3准则只需要2帧信息,太过宽松;而3/4准则需要3帧信息,而且不要求全部连续,是比较合适的选择.
根据光电跟踪特点,本文讨论n=m−1情况下的n/m准则,该准则使得航迹建立只和最近的m相关,同时不能连续丢失2帧.
3.3 航迹矩阵的更新
航迹矩阵初始化为一个全0矩阵,获取到第2帧时开始进行航迹矩阵更新.航迹矩阵的更新和建立本质上是相同的过程.
令采集到第k帧的候选动目标集合为Ok={okq,q∈Z+,q≤Nk},其中Nk为该帧的候选动目标总数.
由于采用(m−1)/m作为判据,因此航迹矩阵更新仅和之前的两帧相关,令k帧之前两帧为i=k−2和j=k−1帧.
将Ok与Oj遍历配对,可求得每对的速度参数(v,s)pq,pq∈Z+,p≤Nj,q≤Nk.对于满足速度选通条件:

的目标可由下式得到θ,再由(1)式得到ρ,从而得到平面内的参数(ρ,θ)pq.

这种处理避免了对每个候选动目标在参数空间中对所有参数逐一遍历,大大减少了计算负荷[11].
根据(ρ,θ,v,s)pq可得到离散化中心点(ρn,θn,vn,s),并将其加入参数集合Skj,同时更新航迹点集矩阵:

对Ok与Oi也进行相同的遍历配对过程,参数加入集合Ski.完成全部遍历配对后,对航迹矩阵进行更新:

由于集合元素的唯一性,对于每帧而言,航迹矩阵中的每个元素至多增加1.当出现同一帧内多个点形成同一个航迹时仍只计1个数.
由于采用(m−1)/m准则时,航迹矩阵中只需保留最近m帧的信息,因此在完成航迹确认和提取后,需要消除第k−m+1帧产生的航迹:

3.4 航迹建立与提取
航迹更新后,需要根据航迹建立准则对航迹矩阵内的候选航迹进行判别,对于完成航迹起始的航迹需要提取出来.由于航迹矩阵中只保留了m帧的信息,理论上,矩阵中取值为m−1的元素即为建立的航迹.但实践中由于测量误差等以及参数空间是离散化的,同一航迹会出现在参数空间中相邻的区域中.
在跟踪中采用的起步帧数m也不会太大,因此在航迹矩阵中的投票很少,采用传统Hough峰值提取方法并不合适.
通过上述分析可知,跟踪过程中新建的航迹必然包含Sk内的点.因此以Sk内的点作为参考,考察其邻域情况.通常m<7,因此仅仅考察其1个邻域.
对于每个t∈Sk,当P(t)=m−1时,则建立航迹,同时置P(t)=0、Q(t)=∅.当P(t)<m−1,则考虑和t航迹方向一致(s相同)的6邻域T.根据Q(t)中的点坐标可通过最小二乘求得其在xy平面内的直线参数,表达为(ρ,θ)=f(Q(t)),选择的邻域满足:

当P(t′)+P(t)=m−1时建立航迹,同时将P(t)、P(t′)置0,Q(t)、Q(t′)置空.
3.5 完整流程
根据上述讨论,建立完整的跟踪流程,如下:(1)初始化P、Q矩阵,O0=∅, O−1=∅,i=1;(2)获取第i帧图像,全视场扫描后,和星表比对去除恒星后形成候选动目标集合Oi;(3)形成Sk,根据(7)式和(8)式更新矩阵P、Q;(4)对于t∈Sk,根据P(t)大小依次排列,逐一进行航迹提取;(5)提取出的航迹满足跟踪要求,转跟踪过程; (6)根据(9)式更新矩阵P、Q;(7)i=i+1,重复步骤2.
4 仿真试验
为验证本文方法的有效性,使用中国科学院空间目标光学观测网中的一台40 cm口径的望远镜采集图像,获取图像上的星像作为空间目标航迹起始试验中的背景恒星,图像分辨率为512pixel×512pixel,视场0.7°×0.7°,曝光时间为100ms,采样频率1 Hz.计算采用PC机,配置为双核酷睿2,主频2.2 GHz,内存2 GB,采用VC6.0平台编写了实时处理程序.获取的4帧图像如图1所示.
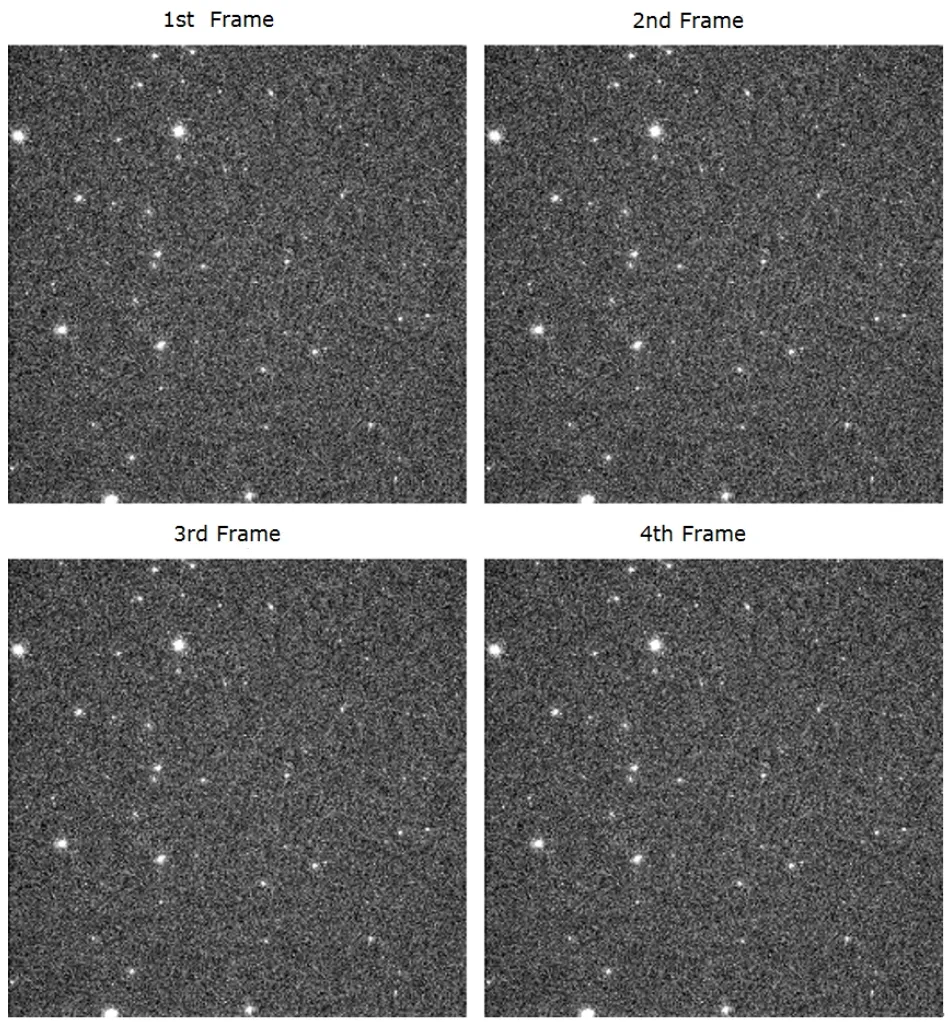
图1 采集到的实测图像Fig.1 Im age sequence of rea l observations
图中含有一个真实空间目标,为了验证多目标和不同航迹情况下算法的效果,人为加入了4个仿真目标.仿真目标信息列于表1.
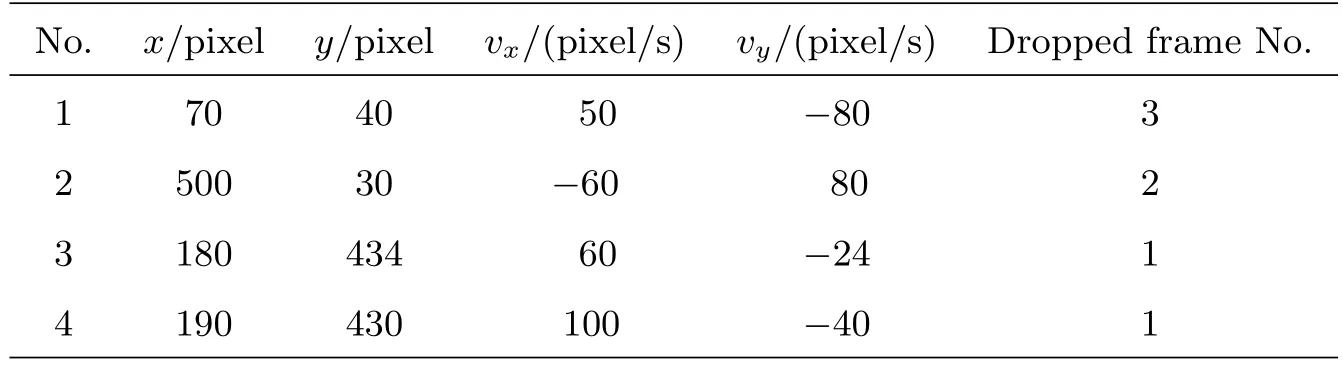
表1 仿真目标信息Tab le 1 The in form ation of sim u lated ob jects
其中(x,y)为目标首次出现在帧上的图像坐标,(vx,vy)为速度,令空间目标为匀速运动.为了模拟丢帧的情况,对于仿真的目标都设置了丢帧.首先通过全视场扫描和恒星剔除,得到的候选动目标如图2.
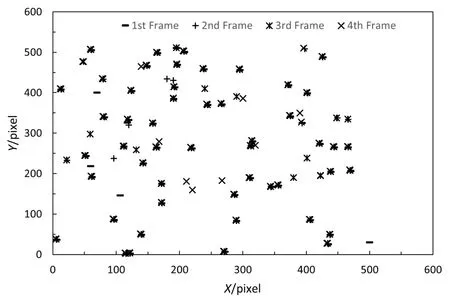
图2 候选动目标Fig.2 The cand idates of m oving ob jects
航迹起始中速度选通范围为[10,240]pixel/s,离散化网格大小为δρ=5 pixel、δθ=5°、δv=3 pixel/s,采用3/4确认准则.每帧处理后得到的航迹起始过程如表2.表中给出了每帧处理后的候选动目标数以及新增、销毁和确认的航迹数.进行恒星剔除后仍然有残留星象构成虚警,经过速度选通条件后去除了部分虚警航迹,航迹总数不太多,能够满足当前实时处理需求.提取出的航迹见图3.
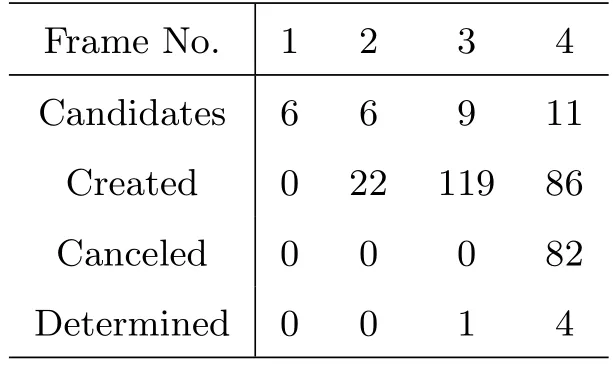
表2 航迹起始过程Tab le 2 T he p ro cess of track in itiation
其中航迹1是原始图像上包含的真目标航迹,在连续4帧上都有采样,在第3帧时被确认提取.其余4条是仿真航迹,其中航迹2和航迹3分别丢失了第3帧和第2帧,由于不要求连续采集3帧,因此在第4帧时两条航迹都被确认提取.航迹4和5都缺少第1帧,两者运动轨迹几乎重合,但都正确识别.识别得到的5条航迹和预设情况完全一致.
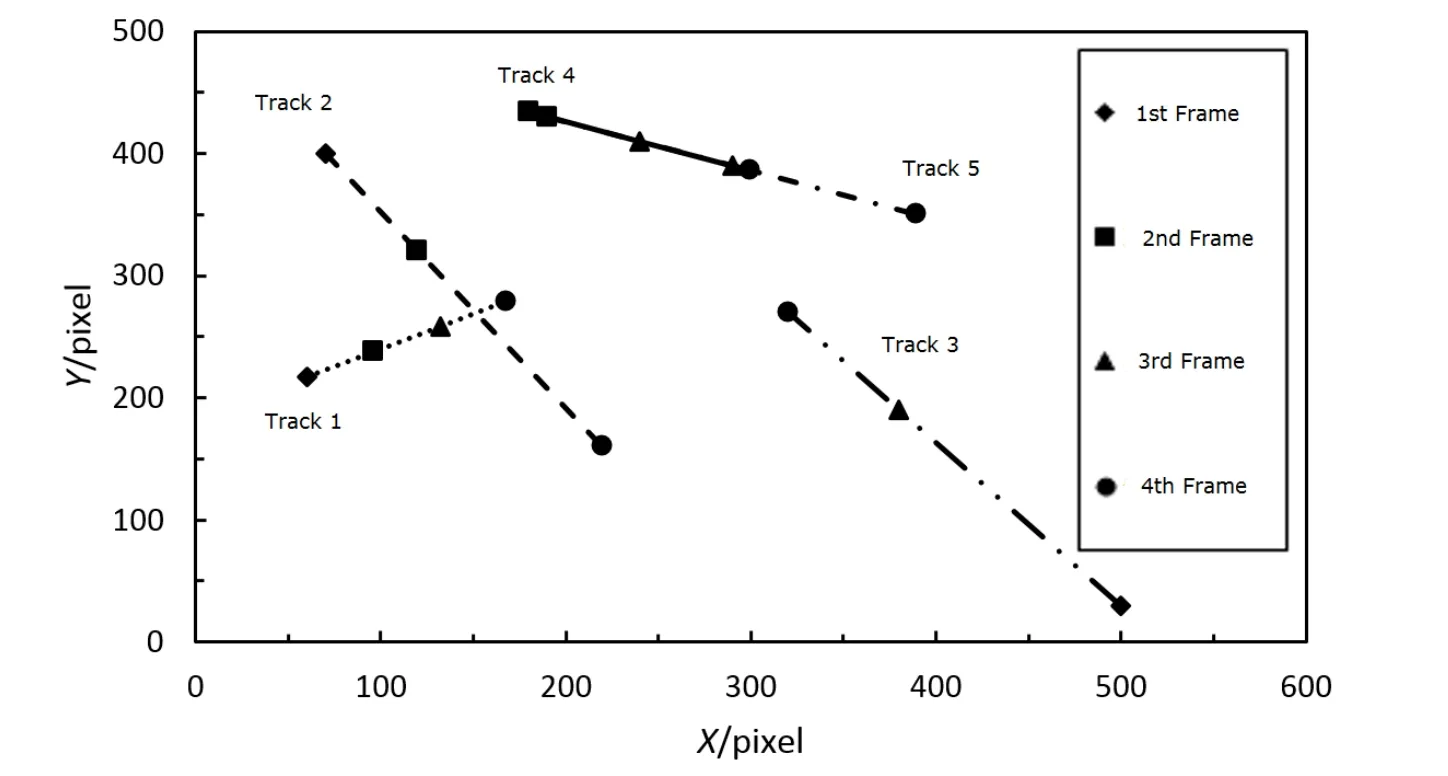
图3 航迹起始结果Fig.3 T he resu lt of track in itiation
5 结论
仿真实验表明,本文方法有效可行,在没有先验信息的情况下,对经过视场的动目标可实现自动识别.方法不再局限于已知目标和单目标,可同时实现多目标航迹的提取,除了常规跟踪外,特别适合空间目标的搜索发现,能够在发现目标后直接过渡到跟踪,从而获得较长弧段,提高新目标的认证效率.方法没有按照传统Hough变化逐点进行参数遍历,仅考虑配对航迹点,避免了航迹爆炸,大幅度降低了计算量,能够满足实时跟踪的需要.
[1]董志荣.情报指挥控制系统与仿真技术,1999,2:1
[2]吴连大.人造卫星与空间碎片的轨道和探测.北京:中国科学技术出版社,2011:266-292
[3]Carlson B D,Evans E D,Sw ilson S L.Aerospace&E lectronic System s,1994,30:102
[4]王怀理,王德生,田立生.清华大学学报:自然科学版,2002,42:909
[5]贺鹏.Hough变换航迹起始算法研究.西安:西北工业大学,2007
[6]王歆,许占伟.天文学报,2012,53:145
[7]W ang X,X u Z W.ChA&A,2012,36:426
[8]许占伟,王歆.天文学报,2015,56:305
[9]Xu Z W,W u L D,W ang X.P roceed ings of the 27th Con ference of Spacecra ft TT&C Techno logy in Ch ina.北京:清华大学出版社,2014:399-408
[10]Hough P.M ethod and M eans for Recogn izing Com p lex Patterns:US Paten t,US003069654,1962
[11]Lo T,Leung H,B ridgew ater A W,et al.AGARD Con ference P roceed ings,1994,539:25.1
[12]孙强,惠晓滨,郭璐,等.航空计算技术,2011,41:10
[13]何友,修建娟,张晶炜,等.雷达数据处理及应用.北京:电子工业出版社,2009:93-94
Track In itiation for E lectro-Op tical Tracking of Space Ob jects
XU Zhan-wei1,2WANG Xin1,2
(1 Pu rp le M oun tain O bserva to ry,Chinese A cadem y of Scien ces,Nan jing 210008) (2 K ey Laboratory for Space Object and D ebris Observation,Purp le M oun tain Observatory,Chinese A cadem y of Scien ces,Nan jing 210008)
Aimed at the track initiation for the electro-optical tracking of space ob jects,and based on modified Hough transformation,a track initiation algorithm without prior information is proposed to realize the fully robotic identification and tracking ofmoving ob jects.Themethod is valid for the tracking ofmulti-target aswell aswith a non-continuous sequence.Simulation shows that themethod is effective and app licable for operational usage,and is especially good for the search and discovery of new ob jects.
space vehicles,telescopes,techniques:image processing
P111;
A
10.15940/j.cnki.0001-5245.2016.02.008
2015-07-23收到原稿
∗中国科学院国防科技创新基金(CXJJ-15S129)和国家自然科学基金项目(11373072)资助
†xzwei@pm o.ac.cn
‡wangxin@pmo.ac.cn
