机器视觉的灾后救援机器人越障系统设计*
2016-06-24刘泓滨李华文
王 宇, 刘泓滨, 李华文
(1.昆明理工大学 机电工程学院,云南 昆明 650500;2.广东省工业技术研究院 机电工程研究所,广东 广州 510000;3.云南红云红河烟草集团 昆明卷烟厂,云南 昆明 650022)
机器视觉的灾后救援机器人越障系统设计*
王宇1,2, 刘泓滨1, 李华文3
(1.昆明理工大学 机电工程学院,云南 昆明 650500;2.广东省工业技术研究院 机电工程研究所,广东 广州 510000;3.云南红云红河烟草集团 昆明卷烟厂,云南 昆明 650022)
摘要:为了辅助救援人员更好地完成灾后救援工作,设计了一种基于机器视觉、多传感器耦合的灾后救援机器人越障系统。通过机器视觉系统获取障碍物图像信息,多传感器耦合获取灾后现场环境信息,采用VC++编程,借助 OpenCV 库对障碍物图像进行一系列数学形态学的处理,利用图像处理得到障碍物数字图像信息,并实时地传输到控制端,控制机器人进行越障救援。该系统成功地控制机器人快速的越障试验,表明了它具有较强的地面适应性和越障能力,满足灾后救援机器人系统的要求,具有一定的应用价值。
关键词:机器视觉; 多传感器; 越障; 图像处理
0引言
全球范围的自然灾害不断频发,给当前的现场救援技术带来了巨大的挑战。尤其是在破坏性地震发生后,作为专业的地震救援工作者,如何用科学的救援方法、先进的技术装备去营救幸存者,是首要任务[1]。从最早的火灾救援机器人的研制与应用,到美国“911”恐怖袭击事件中,救援机器人成功地在世贸中心的废墟进行搜索救援[2],再到“311”日本地震中,搜索定位机器人以及核事故处理机器人的应用[3],可以看到机器人救援的必要性和可行性,尤其是具有良好越障性能的救援机器人发挥的作用更是巨大的。因此,对于移动机器人来说,在移动过程中是否能快速、准确地对周围环境信息做出反应,并且不间断地朝着目标点前进,是非常重要的[4,5]。轮式机器人结构简单,通过壕沟、台阶等障碍物的能力差;腿式机器人相比轮式机器人的地形适应能力更强,但是它的移动速度慢、控制难度大且机械结构复杂[6],履带式机器人具有更多突出的优点,但是有转向半径,越障效率低[7,8]。在灾难救援任务中,复杂地形与恶劣环境对机器人运动性能提出了严峻挑战,现今大多数移动机器人存在控制系统实时性差、越障能力和自主性不够强等缺点,满足不了高性能小型自主移动机器人的需求[9]。
因此,本文设计一种基于机器视觉、多传感器耦合的灾后救援机器人越障系统,视觉系统获取障碍物图像再经过处理得到的数字图像信息,多传感器耦合获取灾后现场环境信息,并实时传输到控制端,控制机器人快速越障,配合救援人员展开救援,实现智能化救援。
1越障系统总体结构
如图1所示,整个系统由两部分组成: 轮履移动机器人和远程计算机控制端。两部分之间的通讯由无线局域网来完成。轮履机器人上的温湿度传感器、音频视频传感器、红外测距传感器同时获取灾难现场的环境信息,并分别传输到控制端;视觉系统获得灾难现场壕沟、台阶等障碍物信息,经过处理得到障碍物的尺寸位置,并传输到控制端;远程计算机通过无线通信网络获取机器人状态信息和视觉图像信息,操作者可以在远程计算机上向机器人下达指令,并可以监控和远程操控机器人越障,进行救援。
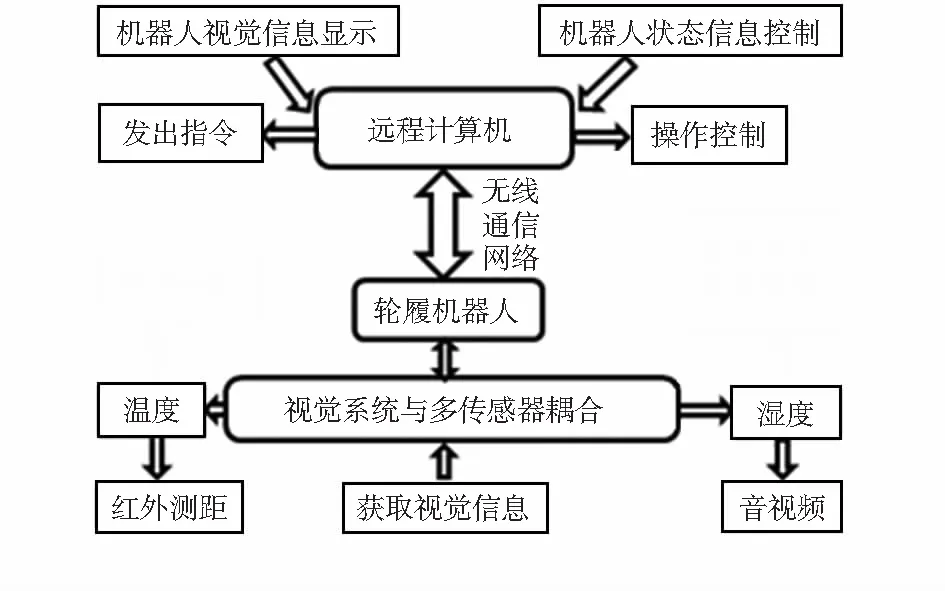
图1 越障系统整体结构Fig 1 Overall structure of obstacle surmounting system
2越障系统硬件设计
2.1灾后救援机器人平台
如图2 所示,机器人由两边相同的双曲柄变形模块、轮履替换模块和多传感器耦合及控制部分组成。轮履替换模块可根据灾后现场地形环境的不同选择采用轮式行走模式或者履带式行走模式。在履带或者轮损坏的情况下相互替换确保机器人正常作业。双曲柄变形模块可保证机器人在遇到障碍物时,通过变形来越障。多传感器耦合部分会获取灾难现场的温湿度、障碍物距离等灾难现场信息,同时传输到控制端,配合救援人员控制机器人越障,展开救援。
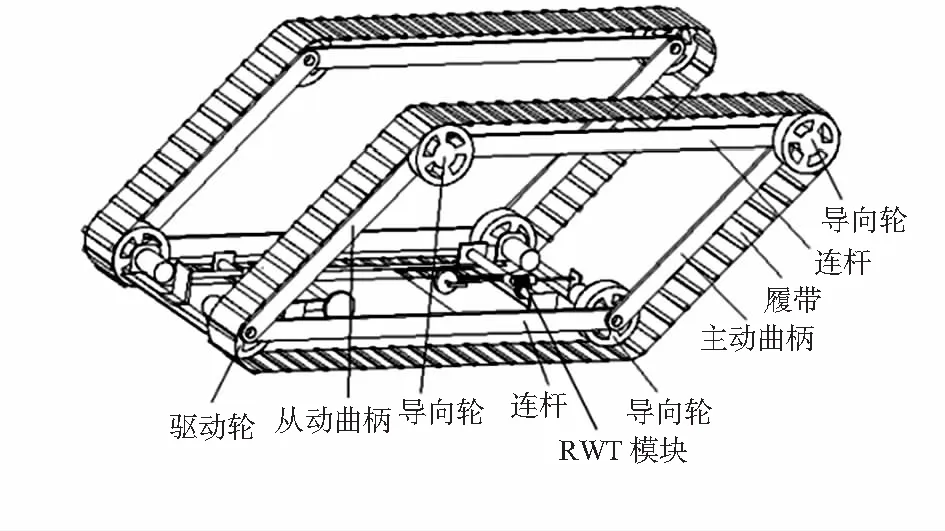
图2 救援机器人整体结构Fig 2 Overall structure of relief robot
从柳属植物中共分离得到6个萜类化合物,多为三萜类化合物,其中1个新化合物,见表4[15,26,29-30]。
4.2实验Ⅱ
系统的CCD相机获取灾难现场图像信息并实时地传输到控制端,操作人员框取可疑目标物,由图像处理模块进行特征处理,经过图像处理自动获取障碍物3D模型上特征点的三维坐标,获得障碍物的尺寸信息,图像处理模块获得障碍物尺寸大小后,实时将其通过通信模块发送给控制系统,结合多传感器耦合下获取的灾难现场环境信息,由控制系统控制机器人进行越障救援。
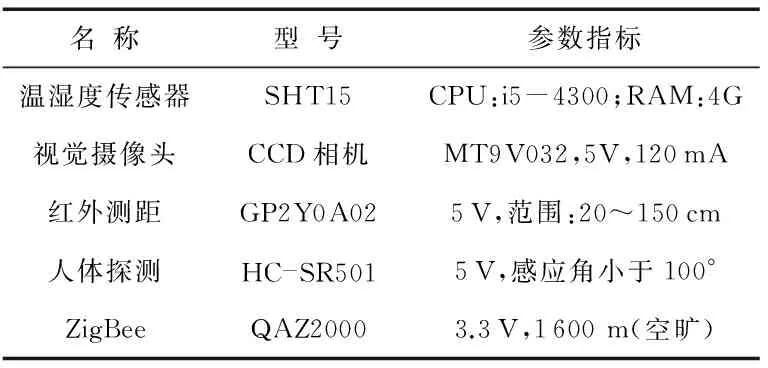
表1 传感器硬件选型与参数
3视觉系统设计
引理 3[5] 设G为群,且|G|=,其中p1,p2,···,pn是一些互不相同的素数,则群G的独立数β(P(G))≥n.
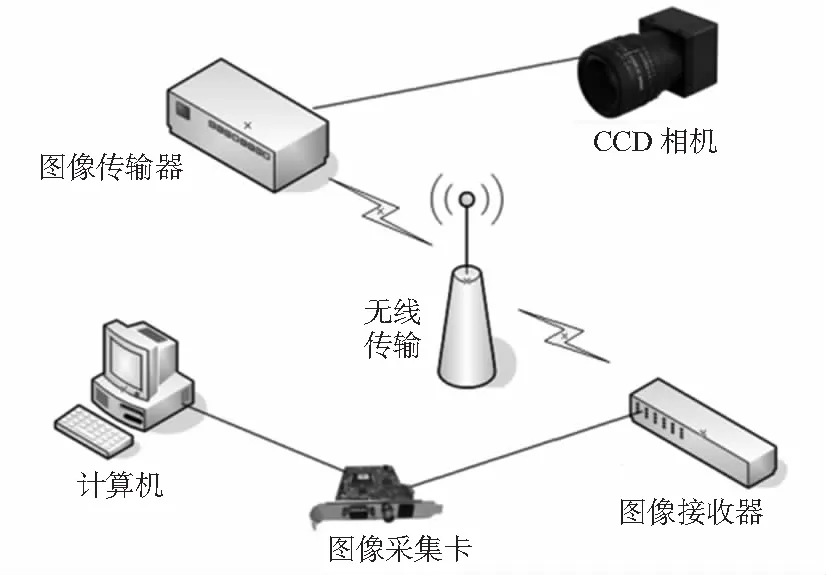
图3 视觉系统结构图Fig 3 Structure diagram of visual system
灾难现场,救援机器人能否快速准确地找到被困人员的位置并辅助消防人员进行救援,是灾后救援机器人性能的重要指标。多传感器耦合确保机器人及时地获取灾难现场温湿度、音视频等环境信息,传输到控制端,协助消防人员控制机器人成功越障,进行救援。各传感器的选型与参数如表1。
灾后救援机器人在进行越障救援时,除了多传感器耦合获取灾难现场环境信息外,增加了视觉系统,通过图像处理和模式识别来确定机器人与障碍物之间的相对位置坐标,结合多传感器耦合下获取的灾难现场环境信息,利用相机双平面标定法和小孔成像原理求解,由机器人控制系统自动控制越障,配合救援人员进行救援工作。视觉系统在物理上可分为如下几部分:1)机器人本体上CCD相机;2)无线图像传输、接收器;3)图像采集卡;4)计算机。具体结构如图 3所示。
2.2多传感器耦合
4实验与分析
系统实验样机使用的是轮履替换变形机器人平台,如图4,机身长550 mm,宽400 mm,高450 mm,传感器安装在机器人前方炮筒内、CCD相机安装在最上方。

图4 机器人平台Fig 4 Robot platform
目前,知识产权评议的实施主要依靠国家知识产权局等业务主管部门以及地方政府出台的政策性文件(包括部分部委规章和地方性立法)。而基于知识产权评议进一步规范化与科学化的要求,必须通过法律对于知识产权评议进行整体性制度构建,赋予知识产权评议适当的法律性质与效力,同时对知识产权评议予以必要的法律控制。
4.1实验
灾后救援工作中,如何快速准确地判断出被困人员位置,高效率地越过障碍物进行救援显得尤为重要。机器人在多传感器耦合下获取灾难现场环境信息并通过视觉系统将灾难现场图像传输给消防人员配合救援,既实现了救援的高效率,又实现了智能化救援、数字化救援。现对机器人在履带运动速度为0.1 m/s下进行越过壕沟障碍实验。
表2 越过壕沟障碍实验数据
从实验结果可以看出:机器人在越过壕沟障碍时,在多传感器耦合下的时间误差明显较低,且均在0.2 s内,越过壕沟障碍时间越短,在实际救援工作中,可以根据在多传感器耦合下视觉系统获取的灾难现场环境信息,控制机器人快速越障救援,实现高效率救援。
一是继续加强制度建设,针对工作中出现的新问题、新情况,及时出台或完善易地扶贫搬迁、扶贫小额信贷等管理制度,进一步夯实制度基石。
灾难救援现场,最宝贵的就是时间,准确而又快速地找到被困人员进行救援显得至关重要。机器人能快速地越过各种障碍辅助消防人员进行救援是灾后救援的重点。现对机器人在履带运动速度为0.1 m/s下进行越过台阶障碍实验。

表3 越过台阶障碍实验数据
从实验结果可以看出:机器人不在多传感器耦合下越过台阶障碍时间误差在0.5 s内,在多传感器耦合下越过台阶障碍时间误差在0.2 s内,在多传感器耦合下的时间误差明显较低,越障时间短,在实际救援工作中,可以根据多传感器耦合下视觉系统采集处理得到台阶障碍物的信息及时调整机器人越障的合适姿态越障,实现高效率救援。
农村三大产业融合发展是乡村振兴的重要途径。2016年国务院印发的《关于推进农村一二三产业融合发展的指导意见》中明确指出,推进农村一二三产业融合发展,是拓宽农民增收、加快农业发展方式转变、探索中国特色农业现代化道路的必然要求,也是构建现代农业产业体系的重要举措;党的十九大报告提出实施乡村振兴战略,对农村一二三产业全面发展、全面融合提出了更高要求。广西应借此东风,根据实际情况,因地制宜,加大财政对农村一二三产业融合发展的扶持。
5结论
在多传感器耦合下视觉系统获取并处理得到的灾难现场障碍物的图像信息,传输给消防人员配合救援。越障系统在多传感器耦合下越过壕沟障碍、台阶障碍时间误差均在0.2 s内,在误差范围内,进行快速越障。实验结果表明:该越障系统具有很好的壕沟、台阶等障碍物的通过性能,达
到了灾后救援机器人越障系统的项目要求,实际推广应用价值大,市场前景广阔。
参考文献:
[1]张涛,尚红,许建华,等.机器人技术在地震废墟搜索救援中的应用[J].自然灾害学报,2012,21(5):108-112.
[2]刘军,程继国,尹志,等.消防机器人灭火救援应用技术分析[J].消防技术与产品信息,2010(11):15-18.
[3]高瑞霞.美国的灭火与救援机器人研发综述[J].消防技术与产品信息,2005(3):59-60.
[4]李寿涛,李元春.在未知环境下基于递阶模糊行为的移动机器人控制算法[J].吉林大学学报:工学版,2005,35 (4):391-397.
[5]鲍庆勇,李舜酩,沈峘,等.自主移动机器人局部路径规划综述[J].传感器与微系统,2009,28(9): 1-4.
[6]钱善华,葛世荣,王永胜,等.救灾机器人的研究现状与煤矿救灾的应用[J].机器人,2006,28(3):350-354
[7]吉洋,霍光青.履带式移动机器人研究现状[J].林业机械与木工设备,2012,40(10):7-10.
[8]Tomoya Inoue,Takuya Shiosawa,Ken Takagi.Dynamic analysis of motion of crawler-type remotely operated vehicles[J].IEEE Journal of Oceanic Engineering,2013,38(2):375-382.
[9]王超杰,苏中,连晓峰,等.自主柔性变形蛇形机器人控制系统设计[J].传感器与微系统,2015,34(6): 112-114.
Design of disaster rescue robot obstacle surmounting system based on machine vision*
WANG Yu1,2, LIU Hong-bin1, LI Hua-wen3
(1.Faculty of Mechanical and Electrical Engineering,Kunming University of Science and Technology, Kunming 650500,China;2.Institute of Electrical and Mechanical Engineering,Industrial Technology Research Institute of Guangdong Province, Guangzhou 510000,China;3.Tobacco Group of Kunming,Honghe Hongyun Yunnan,Kunming 650022,China)
Abstract:In order to assist rescue workers complete post-disaster relief work better,put forward a kind of disaster rescue robot obstacle surmounting system based on machine vision,and multisensor coupling obstacle image information is obtained by machine vision system,multi-sensor coupling is used for post-disaster site environment information,using VC++ programming,with the help of OpenCV library,processing of a series of mathematical morphology is carried out on obstacles image,digital image information of obstacles are obtained by image processing,and real-time transmit to control terminals,control robot for obstacle surmounting rescue.The system successfully control robot for rapid obstacle surmounting test,shows that it has strong ground adaptability and obstacle surmounting performance which meet the requirements of disaster relief robot system,has a certain application value.
Key words:machine vision; multi-sensor; obstacle surmounting; image processing
DOI:10.13873/J.1000—9787(2016)04—0079—03
收稿日期:2016—03—07
*基金项目:昆明理工大学学术科技创新基金资助项目(2015YB016)
中图分类号:TP 242.3
文献标识码:A
文章编号:1000—9787(2016)04—0079—03
作者简介:
王宇(1989-),男,湖北随州人,硕士研究生,主要从事传感器、模式识别方面的研究。
