基于光学的触觉传感器电路设计*
2016-06-24张贵相
张贵相, 郭 峰, 张 春
(清华大学 微电子研究所,北京 100084)
基于光学的触觉传感器电路设计*
张贵相, 郭峰, 张春
(清华大学 微电子研究所,北京 100084)
摘要:相较于电信号触觉传感器,基于光学的触觉传感器性能更好,受外界环境影响小,抗干扰性能更高。触觉传感器以弹性材料模拟人体皮肤,在弹性材料内部有标记点阵列。用摄像头拍摄标记点的图像,通过测量弹性材料受力发生形变时标记点阵列的位移情况来求解出力的分布情况,进一步计算出触觉信息。传感器采用EP4CGX30为主处理芯片,采用双层电路堆叠的方式实现,总尺寸为40 mm×20 mm×15 mm。
关键词:触觉传感器; 光触觉;标记点
0引言
电信号触觉传感器可以与信号处理电路直接连接,输出受力信息。同时,随着微电子技术的发展,信号处理电路可以封装在传感器中构成传感器单元,传感器单元的尺寸也变得越来越小,但电信号的触觉传感器又容易受到外界环境的影响[1]。
一种新型的触觉传感器为基于光学的触觉传感器,主要由弹性体和图像传感器两部分组成。传感器受力时,其弹性体发生的形变与其所受力的大小有关,通过图像传感器获取弹性体形变,进而获得传感器受力信息,即触觉信息。由于图像传感器输出的是数字信号,因此,基于光学的触觉传感器受外界环境影响小,抗干扰性能更高。效果比较好的基于光学的触觉传感器有Gelforce传感器和Gelsight传感器。Gelforce传感器通过在弹性体内部放置标记点,测量传感器受力时标记点位移计算出传感器受力[2]。Gelsight传感器在弹性体表面涂有一层全反射涂料,通过测量传感器受力时反射光强的变化获取弹性体形变[3]。
大多数基于光学的触觉传感器都需要连接PC,将图像
传感器采集的图像传输至PC端处理计算得出传感器受力信息,这不利于传感器的小型化,影响传感器的使用范围。本文用电路实现信号处理算法,并实现信号处理电路的小型化,与参考Gelforce设计的传感器构成传感器系统,使系统可以直接输出受力信息并可以安装在机械手内,增加基于光学的触觉传感器的使用范围。
1基于光学的触觉传感器Gelforce的基本原理
如图1所示,Gelforce传感器的弹性体内有许多标记点,当传感器受力时,弹性体发生形变,标记点位置发生变化。
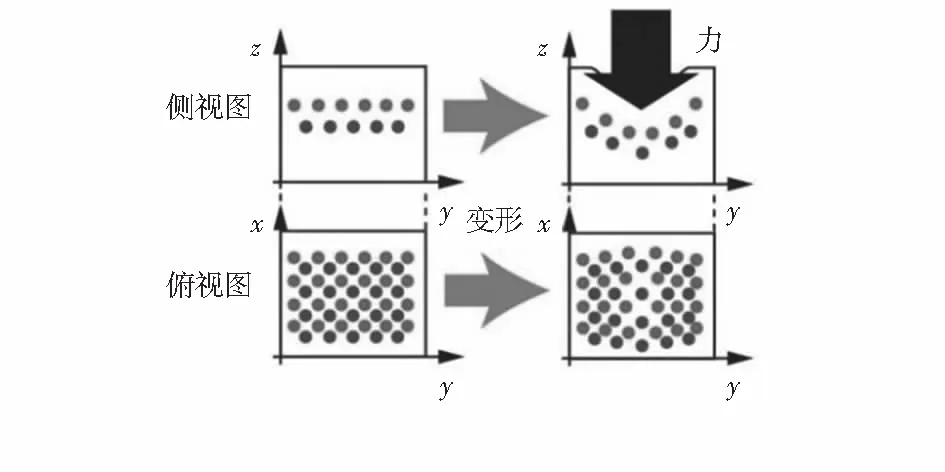
图1 传感器受力时标记点的位置变化Fig 1 Position change of markers when sensor is applied force
假设弹性体表面仅有一点受力,以此点为原点,平行于弹性体表面的平面为xy平面,垂直于xy方向指向弹性体内部的方向为z方向,建立坐标系。设受到的力F为(Fx,Fy,Fz),某一个标记点的坐标d为 (x,y,z),由文献[4]中介绍的弹性原理可计算出标记点在x,y方向的位移分别如式(1)、式(2)所示
(1)
(2)
式中r为标记点到原点的距离,即标记点选定后x,y,z和r均为定值;σ为材料的泊松系数,E为材料的杨氏模量,它们仅与材料自身的力学特性有关,当弹性体材料选定后,σ与E也为定值。此时,式(1)、式(2)等号右端除了Fx,Fy,Fz均为定值,即标记点位移由受力点的受力信息决定。
弹性材料的实际特性接近线性、均匀、各项同性,因而,做此假设不会产生较大误差。将弹性体表面划分为n个测量点,这种假设下,当n个点受力时,用离散空间φ={(F1,F2,…,Fn),(ξ1,ξ2,…,ξn)}表示n个施加的力Fi和施力位置ξi,弹性体内部m个标记点的位移{d1,d2,…,dm}可以由式(3)计算出
u(A d→j)=H→i,jF→i
H→i,j=H(d→j-ξ→i)
(3)
式中H(x)为弹性体表面受力信息到弹性体内标记点位移的转移矩阵,它是一个2m×3n的矩阵。
传感器Gelforce工作时,传感器的摄像头可以获取弹性体内标记点xy方向的位移,若想通过m个标记点的位移{ud1,ud2,…,udm}求出弹性体表面n个测量点的受力{F1,F2,…,Fn},需求式(3)中H的逆矩阵,即弹性体内标记点位移到传感器表面受力信息的转移矩阵G。由文献[5]可知,当H的行数大于列数,即2m>3n时,H的逆矩阵存在,如式(4)所示
G→=(H→TH→)-1H→T
(4)
当传感器表面的测量点数n<3m/2时,传感器表面的受力信息可由弹性介质内标记点的位移及转移矩阵G求出,如式(4)所示
(5)
2传感器处理电路的设计
传感器处理电路的整体结构如图2所示,其中,FPGA芯片是整个电路的核心,它的功能有:1)控制CMOS摄像头OV7690采集图像并存储在RAM中;2)从RAM中读取CMOS采集的图像,并利用质心法计算出标记点位移;3)利用式(4)计算出传感器受力信息。功能1和2需要对采集的图像进行逐像素点扫描、识别,运算量大,是处理电路的速度瓶颈,因此,采用硬件实现。功能3计算公式相对复杂,但运算量很小,适宜在CPU上用软件实现,所以,采用NiosII实现。
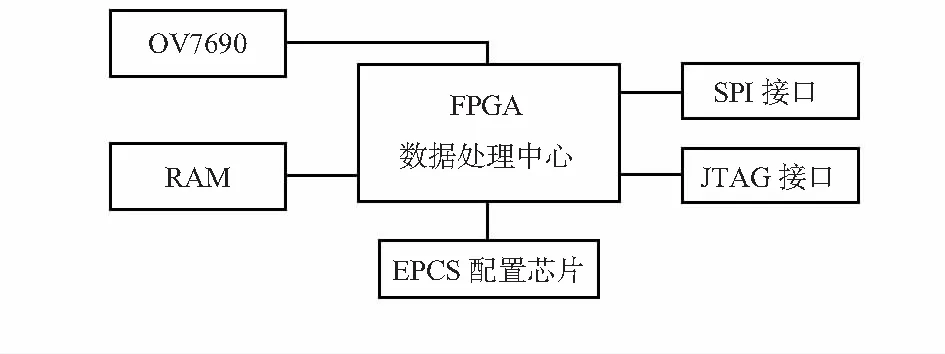
图2 处理电路整体结构Fig 2 Overall structure of processing circuit
为减小尺寸,FPGA选择FBGA封装形式的EP4C30芯片,大小仅为14mm×14mm×1.4mm,RAM选用了BGA封装的SRAM芯片IS61VPS102418A。
处理电路硬件由处理电路板和配置电路板两块电路板组成。处理电路板主要元件为FPGA芯片和RAM芯片,电容电阻均选用0201封装。电路板的尺寸为40mm×20mm×10mm,其实物图如图3所示。

图3 处理电路板实物图Fig 3 Physical map of processing PCB
处理电路板上的接口排列图如图4和图5所示。
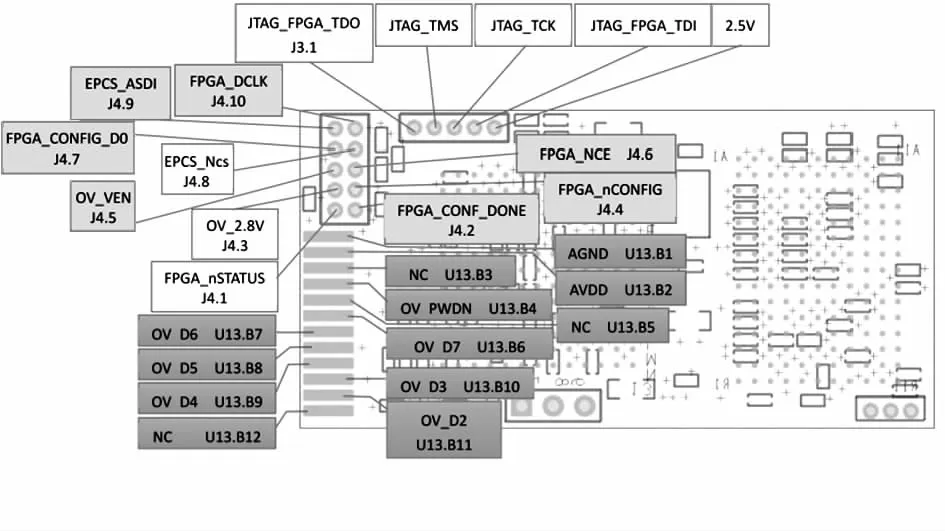
图4 处理电路板接口分配排列图(正面)Fig 4 Pareto diagram of interface on processing PCB (front)
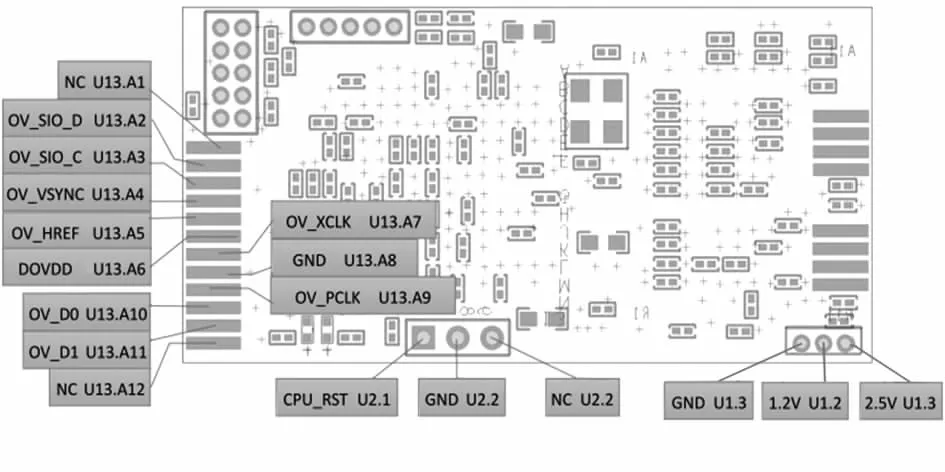
图5 处理电路板接口排列图(背面)Fig 5 Pareto diagram of interface on processing PCB (back)
配置电路板主要由电源芯片和配置芯片组成,电源芯片选用LM1084IS,AME1117CCTZ和AME1117,分别为处理电路板提供3.3,1.2,2.5V电压,面积均为8mm×2mm,EPCS4N为配置芯片,储存FPGA配置信息,面积为6mm×3mm。配置电路板尺寸为35mm×16mm×8mm,与处理电路板通过1.2mm插针插座连接,形成堆叠结构,整体尺寸为40mm×20mm×15mm。
3功能验证
文献[6]中的方法检验信号处理电路的测量标记点位移的功能。在弹性体表面不受力的情况下,对其连续拍摄。将标记点在一定范围内移动,再由信号处理电路计算每次移动后标记点到位移量。
测试结果如表1所示,由于标记点坐标精确到0.125像素点坐标,所以,标记点位移的也精确到0.125像素。从表中可以看出:信号处理电路实现测量标记点位移的功能,误差不大于0.125像素。
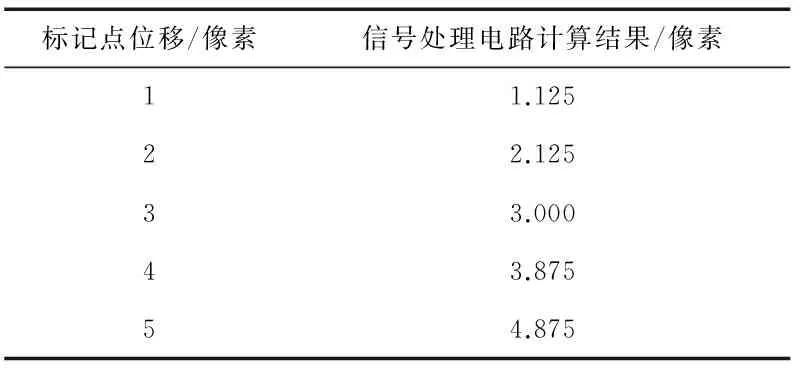
表1 处理电路功能检验结果
4结束语
本文首先详细分析了基于光学的触觉传感器的工作原理,然后设计了基于FPGA的处理电路,它可以实现原Gelforce传感器计算机端的全部处理过程,且电路尺寸仅为40 mm×20 mm×15 mm,这大大增加了基于光学的触觉传感器的使用范围。
参考文献:
[1]Yousef H,Boukallel M,Althoefer K.Tactile sensing for dexterous in-hand manipulation in robotics—A review[J].Sensors and Actuators A:Physical,2011,167(2):171-187.
[2]Kamiyama K,Vlack K,Mizota T,et al.Vision-based sensor for real-time measuring of surface traction fields[J].Computer Graphics and Applications,IEEE,2005,25(1):68-75.
[3]Johnson M K,Adelson E H.Retrographic sensing for the mea-surement of surface texture and shape[C]∥2009 IEEE Confe-rence on Computer Vision and Pattern Recognition(CVPR),IEEE,2009:1070-1077.
[4]Kamiyama K,Kajimoto H,Kawakami N,et al.Evaluation of a vision-based tactile sensor[C]∥2004 Proceedings of IEEE International Conference on Robotics and Automation,ICRA’04,IEEE,2004:1542-1547.
[5]Hetnarski R B,Ignaczak J.Mathematical theory of elasticity[M].Boca Ration:CRC Press,2004.
[6]Sato K,Kamiyama K,Kawakami N,et al.Finger-shaped gelforce:Sensor for measuring surface traction fields for robotic hand[J].IEEE Transactions on Haptics,2010,3(1):37-47.
Circuitdesignforoptics-basedtactilesensor*
ZHANGGui-xiang,GUOFeng,ZHANGChun
(InstituteofMicroelectronics,TsinghuaUniversity,Beijing100084,China)
Abstract:Compared with tactile sensor based on electrical signal,optics-based tactile sensor has a better property,less influence of environment and higher interference resistance.An optics-based tactile sensor is made of skin-like elastic material with markers array inside.When a force is applied to the sensor,the elastic body deforms and the markers move.The camera captures image of the markers.Distribution of force is calculated by displacement of markers array.EP4CGX30 is used as main processing chip,the circuit is PCBs piled together and the totol size is 40 mm×20 mm×15 mm.
Key words:tactile sensor; optics-based tactile; marker
DOI:10.13873/J.1000—9787(2016)04—0070—03
收稿日期:2015—07—11
*基金项目:国家自然科学基金资助项目(61327809)
中图分类号:TP 391
文献标识码:A
文章编号:1000—9787(2016)04—0070—03
作者简介:
张贵相(1989-),男,满族,辽宁本溪人,硕士研究生,主要研究方向为图像处理电路。
