基于五元立体声阵的被动定位系统设计
2016-06-24蔡克荣
蔡克荣, 陈 铭
(上海机电工程研究所,上海 201109)
基于五元立体声阵的被动定位系统设计
蔡克荣, 陈铭
(上海机电工程研究所,上海 201109)
摘要:半主动激光寻的制导技术因其高精度而广泛应用于导弹、炮弹和炸弹等领域,但配套的目标激光指示始终是困扰其使用灵活性的最主要问题。针对无人值守激光目标指示器全空域目标被动声定位的系统需求,设计了一种五元立体声阵并制作了原理样机,推导了基于时延估计的目标定位参数解的表达式。通过对悬停直升机目标进行声测定位结果分析表明:五元立体声阵可以实现对声源目标进行测向和测距,角度估计精度较高,误差小于2°。
关键词:声阵列; 被动定位; 激光目标指示器
0引言
基于声传感器阵列的目标被动定位技术已应用于语音增强、火炮定位、水声探测等领域,仍在不断发展新思想、新理论、新方法。目前主要有三种方法可实现声源定位[1~3]:具有测向能力的波束形成方法,基于子空间分解技术能实现多目标高精度测向的现代方法,以及能同时完成测向和测距的基于时延估计的定位方法,国内外在小基阵被动声定位系统研究方面主要采用时延估计方法。徐长根[4]和陈华伟等人[5]探讨了平面五元十字的定位模型,分析了误差影响因素,得出了比四元阵具有精度优势的结论;狄长安[6]和邱扬刚等人[7]提出了立体空间声阵定位模型,使俯仰角精度得以提高;王伟等人[8]在分析五元十字阵定位误差的基础上给出了修正方法,提高了系统定位精度;李昆原等人[9]则提出了一种特殊构型的七元空间立体声阵模型,使其具有更高的定位精度。
本文针对无人值守激光目标指示器全空域目标被动声定位的系统需求,设计了一种五元立体声阵并制作了原理样机,推导了基于时延估计的目标定位参数解的表达式,并对悬停直升机目标进行了实际测试,实现了较高精度的目标被动声定位。
1五元立体声阵设计
1.1无人值守激光目标指示器
半主动激光寻的制导通常采用“人在回路”方式,由操作手或伴随飞行器搜索并跟踪目标,在适当时间启动激光目标指示器对目标发射编码激光束,引导己方弹药进行精确打击。这种方式可有效解决目标搜索、识别、与跟踪等难题,能够对目标精确定位,也可有效防止误伤、过度毁伤和附带毁伤。同时,对运动目标和时间敏感目标有良好的响应能力,也使得弹药具有一定的“发射后不管”功能。
半主动激光寻的制导武器的突出特点就是具有高精度打击能力,但目标激光指示始终是困扰激光半主动制导使用灵活性的最主要问题[10]。由于激光目标指示器的作用距离有限,其所在平台或操作手须前行到敌方火力范围内,面临严重的生存威胁。因此,只有改进传统激光目标指示器才能使其适应新的作战环境,而无人值守激光目标指示器就是应用小基阵被动声定位系统对战场目标进行初始定位,再由光电系统进行精确指示,然后接收指令在适当时机启动指示器照射目标,通过传感器融合在无人平台上实现了激光目标指示器的无人值守,其原理框图如图1所示。
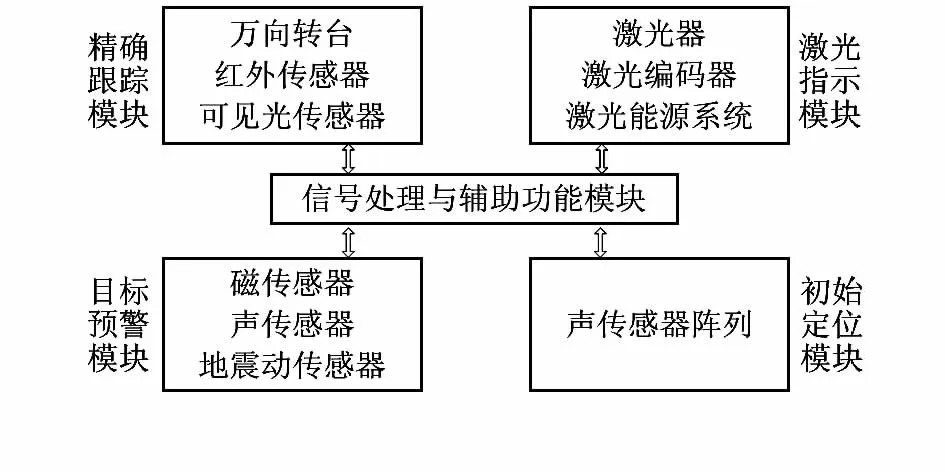
图1 无人值守激光目标指示器系统原理框图Fig 1 Principle block diagram of unattended laser target designator
1.2五元立体声阵
基于时延估计的定位技术是小基阵被动声定位系统的主要技术途径之一。由N个声传感器组成的声阵列,可得到N-1个相互独立的时延。声源目标在空间中有3个位置参数,因此,至少需要4只声传感器按一定阵型排列才可实现对声源目标的空间定位。
目前,已有学者研究了空间立体声阵用于直升机目标定位的可行性[11]。针对无人值守激光目标指示器全空域目标被动定位的需求,设计了一种五元立体正四棱锥声阵,具有全空域目标测向和测距功能,目标方位角和俯仰角信息用于引导精确跟踪模块,目标距离信息用于光电系统的粗调焦。其构造如图2所示,γ1~γ5为5只声传感器。
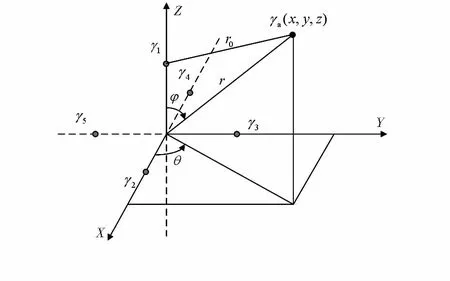
图2 五元立体正四棱锥声阵示意图Fig 2 Stereo square pyramid acoustic array with 5 sensors
2声信号探测系统设计
从空气中的声波振动到可处理的声信号,主要经过声传感器、前置放大、主放电路、低通滤波和AD采样,其原理框图如图3所示。
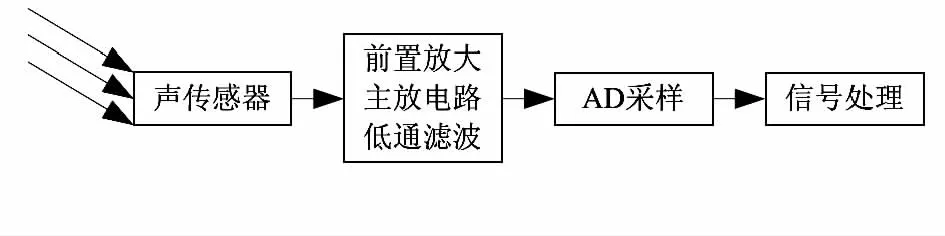
图3 声信号探测系统原理框图Fig 3 Principle block diagram of acoustic signal detection system
2.1声传感器选择
声传感器根据原理不同可分为动圈式、压电式、电容式和驻极体式。驻极体式电容声传感器不需要极化电压,具有体积小、结构简单、电声性能好等特点,广泛用于声控和声探测系统中[12]。综合环境适应性考虑,选择ABC—9767P全指向驻极体声传感器作为敏感元件,灵敏度为(-28±2)dB,频响曲线如图4所示。
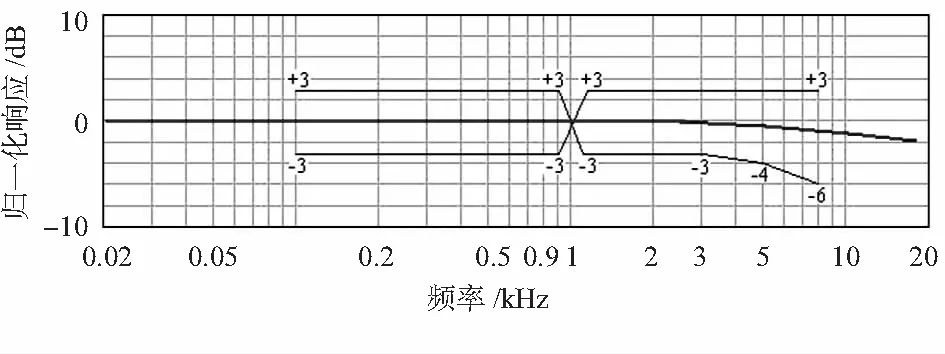
图4 ABC—9767P频响曲线Fig 4 Frequency response curve of ABC—9767P
2.2声信号调理电路
声传感器的原始输出信号是微弱电压信号,需设计合适的调理电路,才能在信号放大的同时不失真,以利于后续信号处理。
1)自动增益控制的前置放大
点声源在自由声场和半自由声场中,不考虑介质的吸收作用,传播距离每增大1倍,声压级约下降6dB。因此,在目标运动过程中,声传感器输出信号的幅度起伏很大,前置放大电路须能自适应地根据输入信号的强弱自动调节电路的放大倍数:在输入信号较小时,增大放大倍数,使输出信号仍能达到较高的信噪比;在输入信号较大时,降低放大倍数,使输出信号不失真。
以MAX9814自动增益控制放大器为核心设计了前置放大电路,其中,低噪声前置放大器具有12dB固定增益,可变增益放大器的增益根据输出电压和AGC门限在20~0dB间自动调节,输出放大器增益选择28dB,低噪声麦克风偏置电压发生器为驻极体麦克风提供2V偏置电压。
2)同相并联仪表放大器
微弱声信号经前置放大后,需主放电路对前置放大电路的输出信号进一步放大。为了在放大差分信号的同时抑制共模信号,设计了同相并联仪表放大器作为主放,第一级由两个同相放大器构成,第二级则是一个差动放大器。同时,为了提高电路的抗共模干扰能力和抑制漂移的影响,在电路设计中,上下对称电阻选用高精度电阻器。
3)低通滤波器
坦克和直升机等战场声目标均辐射大量宽带信号,有低频发动机噪声,也有高频机械摩擦噪声。在声源的远场区,由于声波经过了一定距离的传播衰减,声传感器所能获取的大部分是低频能量。为了减小周围环境噪声的干扰,在主放电路之后,以MAX7480设计了低通滤波器,具有八阶巴特沃斯滤波器性能,将截止频率设置为1kHz。
经设计调试后的声信号调理电路进行了直升机信号的采集试验,由图5直升机声信号时域波形及其功率谱可以看出,声信号调理电路按照设计实现了微弱声信号的放大与低通滤波功能,为后续信号处理奠定了基础。
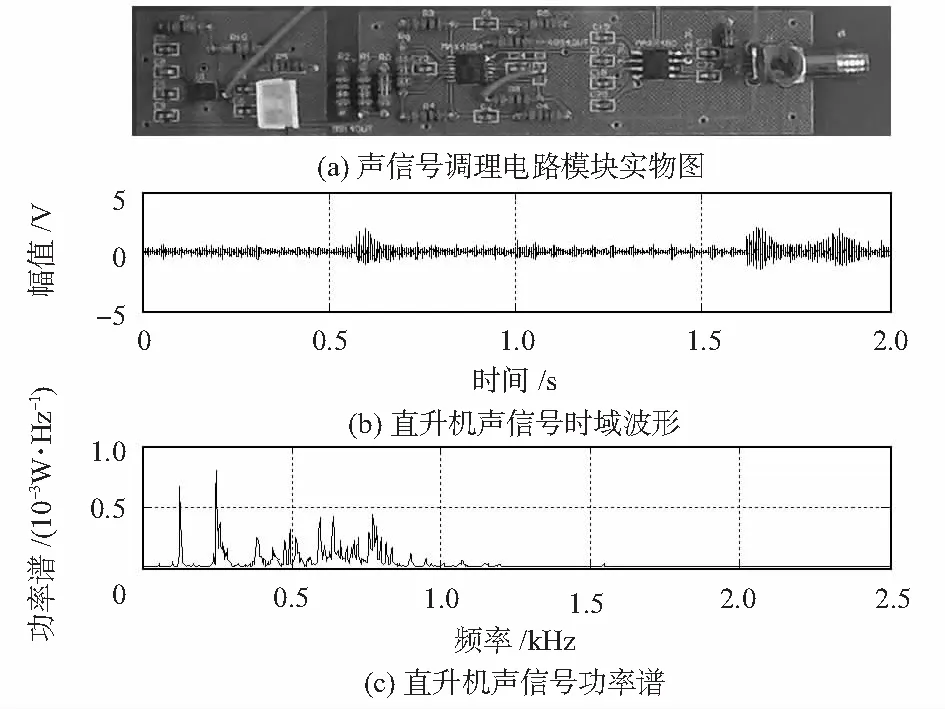
图5 声信号调理电路及其输出信号Fig 5 Conditioning circuit of acoustic signal and its output signal
3基于时延估计的定位方法
基于时延估计的定位方法其实是一种两步间接定位方法,第一步是通过时延估计算法得到声信号到达声传感器的时间差,第二步是根据时间差求解目标的空间位置参数。时延估计及其优化算法已得到广泛研究,本文主要讨论五元立体声阵的目标位置参数解算算法。
图2中,γa(x,y,z)为声源位置,γ1位于(0,0,h),另外4只声传感器距离坐标原点距离均为l,按图示定义目标水平方位角θ∈(-π,π],垂直俯仰角φ∈[0,π]。声源到第i只和第j只声传感器的声程差dij等于时延tij与声速cs的乘积,即
dij=cs·tij
(1)
在平面五元十字阵中存在很多直角三角形关系,可以方便地应用余弦定理建立方程组,而空间立体五元阵的情况并不适合用三角形关系建立精确的关系式,可直接根据式(1)建立以下方程组
(2)

可见,五元立声阵包含有冗余信息(阵元数为5个,有4个独立方程,只有3个未知数),以下推导目标位置参数解的一种表达形式。
通过对式(2)方程组进行联立求解可得
(3)
(4)
可见,式(3)和式(4)给出了直角坐标系下五元立体声阵定位参数解的表达式,在得到时延估计值t21,t31,t41和t51之后,即可运算得到目标坐标值。
另外,由图2可见,有以下关系式
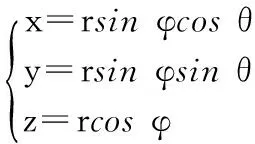
(5)
同理,可得极坐标下五元立体声阵定位参数解的表达式如式(6)所示
(6)
4试验验证
在上述理论设计与分析的基础上,制作了阵元孔径为1m的五元立体声阵,系统采样频率为5kHz,对悬停直升机目标进行声测定位的结果如表1所示(试验时气温27.6 ℃)。由表1可见,五元立体声阵实现了对声源目标的距离和角度进行估计,角度估计精度较高,误差小于2°,可满足无人值守激光目标指示器初始定位的需求。
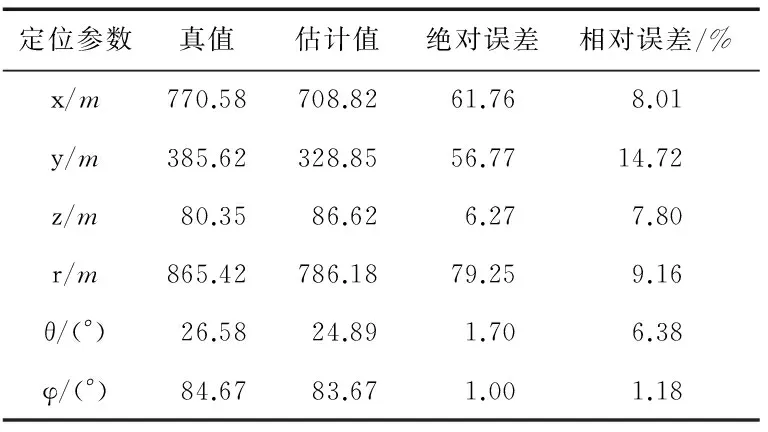
表1 悬停直升机目标的声测定位结果
5结论
针对无人值守激光目标指示器全空域目标被动声定位的系统需求,设计了一种五元立体声阵并制作了原理样机,以全指向驻极体声传感器作为敏感元件,并以MAX9814自
动增益控制放大器为核心设计了声信号调理电路,实现了微弱声信号的探测和放大。同时,在基于时延估计的目标定位参数解推导的基础上,开展了悬停直升机目标的声测定位实验,实现了对声源目标的测向和测距功能,角度估计精度较高,误差小于2°。
参考文献:
[1]赵玉洁.声测定位技术的现状和发展趋势[J].声学与电子工程,1993(4):37-41.
[2]Ferguson Brian G.Time-delay estimation techniques applied to the acoustic detection of jet aircraft transits[J].Journal of the Acoustical Society of America,1999,106(1):255-264.
[3]范卓立,黄根春.基于传声器阵列的声源定位算法与误差分析[J].传感器与微系统,2014,33(10):108-110.
[4]徐长根,张飞猛.基于五元阵的炮兵声测数学模型研究[J].国外电子测量技术,2008,27(4):7-9.
[5]陈华伟,赵俊渭,郭业才.五元十字阵被动声定位算法及其性能研究[J].探测与控制学报,2003,25(4):11-16.
[6]狄长安,闵想,刘新爱,等.带水平倾角的被动声定位双三角阵模型[J].探测与控制学报,2014,36(1):21-24.
[7]邱扬刚,张亚,李世中.五元空间阵声被动定位算法及性能分析[J].四川兵工学报,2010,31(2):122-125.
[8]王伟,倪明,许将明,等.室内五元十字阵被动声定位[J].声学技术,2011,30(1):102-106.
[9]李昆原,叶哲江,邵玉斌,等.多元声阵被动声定位研究[J].云南大学学报:自然科学版,2013,35(1):31-38.
[10] 王狂飙.激光半主动制导技术的新发展[J].红外与激光工程,2008(S3):275-279.
[11] Steadman Robert L,Hansen Scott,Park Chris,et al.Helicopter acoustic alerting system for high-security facilities[C]∥Procee-dings of SPIE,2009:1-8.
[12] 曹一江,孙志斌,刘晓为,等.驻极体声传感器信号采集系统研究[J].传感器与微系统,2006,25(10):19-21.
Designofpassivelocalizationsystembasedonfivecomponentsstereoacousticarray
CAIKe-rong,CHENMing
(ShanghaiElectro-MechanicalEngineeringInstitute,Shanghai201109,China)
Abstract:Semi-active laser guidance technology has been extensively used in missiles,artillery shells and aerial bombs due to its high precision,but target laser indicator which matches to the guidance technology,is the most important issue for operational flexibility.According to the request of target passive acoustic localization in whole space for unattended laser target indicator,a stereo acoustic array with 5 acoustic sensors was designed and made,the localization parameter expressions were deduced in addition.The experiment for a hovering helicopter has been made,and the analyzed results show that,the acoustic array can estimate azimuth angle,pitch angle,and distance of the target,especially the error of angle estimation was less than 2°.
Key words:acoustic array;passive localization;laser target designator
DOI:10.13873/J.1000—9787(2016)04—0067—03
收稿日期:2016—03—07
中图分类号:TP 277
文献标识码:A
文章编号:1000—9787(2016)04—0067—03
作者简介:
蔡克荣(1984-),男,江西玉山人,博士,工程师,主要从事目标探测技术研究。
