永磁悬浮无尘传送系统的悬浮特性及解耦控制仿真分析
2016-06-23金俊杰段振云路英园
金俊杰 段振云 孙 凤 路英园
沈阳工业大学,沈阳,110870
永磁悬浮无尘传送系统的悬浮特性及解耦控制仿真分析
金俊杰段振云孙凤路英园
沈阳工业大学,沈阳,110870
摘要:介绍了一种永磁悬浮无尘传送系统。该系统采用两对双列对称布置的非接触主动永磁悬浮支承。悬浮支承中,永磁铁提供磁性力,伺服电机驱动永磁铁转动,通过改变悬浮支承与悬浮导轨间的磁通量实现悬浮力的实时控制。通过消除冗余的悬浮支承控制点建立悬浮系统的动力学模型,应用LQR控制方法仿真分析未解耦系统的悬浮特性,证明该系统的耦合性及不易控制性。此外,采用状态反馈解耦控制策略对系统进行解耦控制仿真,结果表明该策略可以使系统解耦,并具有较高的稳定性和较快的响应特性。
关键词:无尘传送;永磁悬浮;可变磁路;状态反馈解耦
0引言
目前,在洁净镀膜、电子元件加工、生物实验等无尘传送的工作场合,国内外大多数企业采用导引小车、机器人或机械手等传统的机械传送方式。传统的机械传送方式会有机械接触和润滑,工作中难以避免金属粉尘和油污产生,达不到理想的洁净效果。随着现代科学技术的发展,磁悬浮技术凭借非接触、无摩擦、无润滑的特点,已经广泛应用于磁悬浮列车、超高速轴承、人工心脏泵、精密工作台等领域[1-9]。而磁悬浮技术应用于无尘传送场合,可以满足传送装备洁净度的更高要求,较其他传送方式具有极大的优势。
宋文荣等[10]利用磁悬浮技术,结合直线电机设计了一种磁悬浮进给机构,能够实现无接触驱动,可以满足集成电路加工极为洁净的环境要求。Morishita[11]采用电磁悬浮技术研制了一种应用于电子元器件生产线的悬挂式搬送装置。文献[12-15]研究了磁悬浮转向架,包括系统动力学模型建立、稳定悬浮控制、系统解耦等。文献[16]提出了一种基于盘状径向永磁铁转动的可变磁路型悬浮力控制永磁悬浮系统。该系统可以实时调整悬浮力大小,可实现悬浮力为零,解决接触吸附问题。文献[17] 详细阐述了可变磁路式永磁悬浮系统工作原理,建立了系统参数化模型,分析了系统的动力学及控制特性,理论上证明了系统有良好的动态性能。
本文采用此种可变磁路式永磁悬浮系统作为悬浮支承,构建了四点支承的永磁悬浮传送装置。根据此永磁悬浮无尘传送系统的结构和特性,通过消除多余的悬浮支承控制点,建立了悬浮系统的机械动力学模型,应用线性二次最优控制(LQR)方法仿真研究了未解耦系统的悬浮响应特性,证明了该系统的耦合性及不易控制性,然后采用状态反馈解耦策略对系统进行解耦控制,并对其悬浮特性进行了仿真分析。结果表明该策略可以使系统解耦且响应较快,稳定性较好。
1系统结构与工作原理
永磁悬浮无尘传送系统的结构示意见图1。系统采用悬浮导轨下方悬挂式结构,由框架、两对双列对称布置悬浮支承、传感器、安全限位轮组成。其中,框架由铝合金型材搭建而成;4个悬浮支承均由“F”形导磁体、盘状径向磁化永磁铁和伺服电机(与永磁铁直连)组成;传感器采用了电涡流式位移传感器,其工作平面与导磁体腿部底端面保持平行;另外,为了保护装置在工作时的安全和工作位置的限定,在结构上设置了安全限位轮,可以避免装置因受到悬浮力过小或控制失效而坠落。 传送系统实验装置模型如图2所示。

1.悬浮导轨 2.传感器 3.导磁体 4.永磁铁 5.框架图1 永磁悬浮无尘传送装置结构示意图
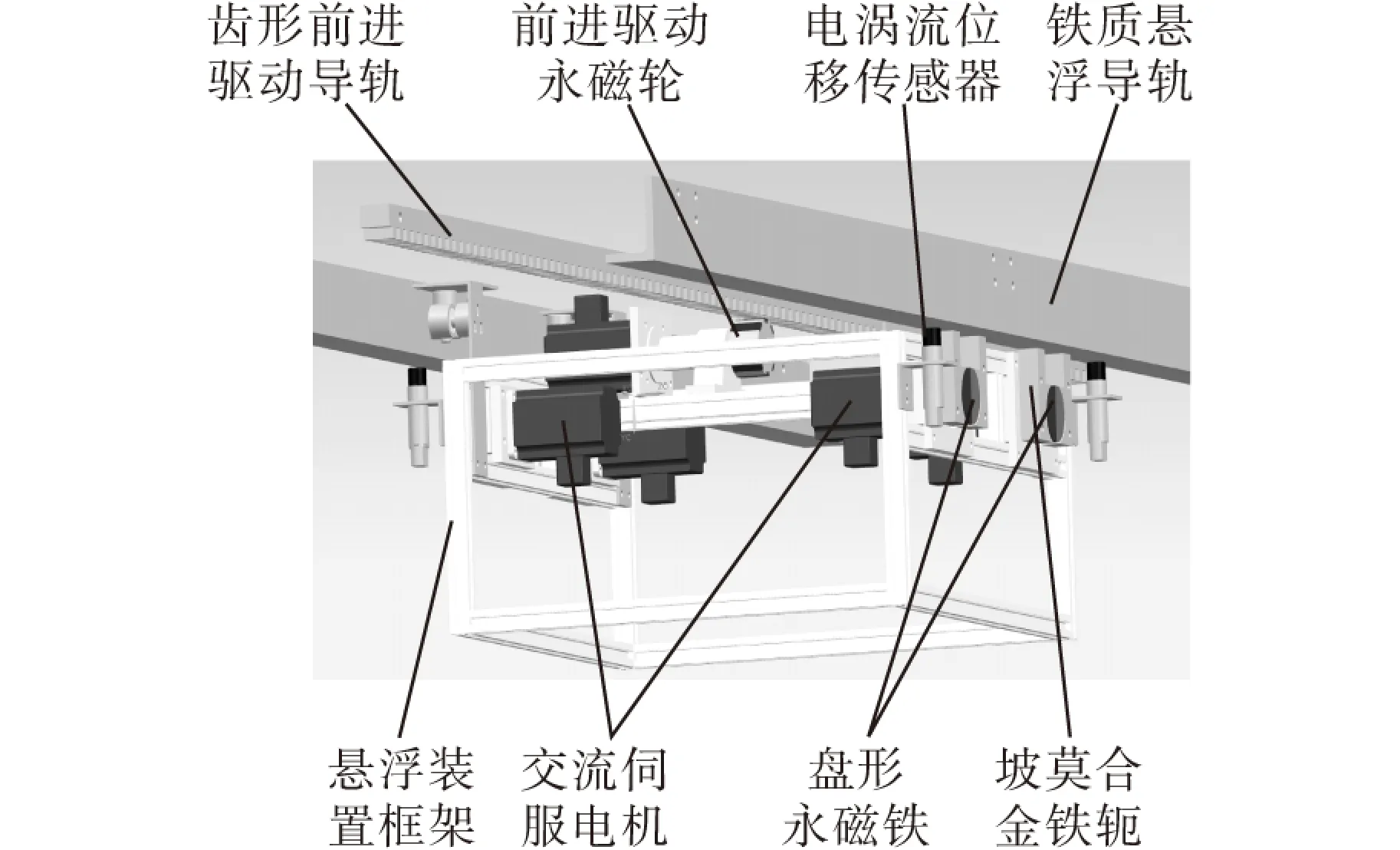
图2 永磁悬浮无尘传送系统的实验装置模型
该无尘传送系统的平稳悬浮是通过控制悬浮支承处的永磁铁的旋转角度,实时控制4点悬浮支承提供的悬浮力大小以平衡重力,来实现装置在Z轴方向上的移动和绕X轴、Y轴(未示出)的转动的,其中X轴方向如图1所示,Z轴方向为竖直方向,Y轴方向与盘状永磁铁轴向方向相同;由于在水平面上设置了安全限位轮,并且悬浮支承处提供的悬浮力在X轴和Y轴方向的分力很小,故不考虑装置沿X轴和Y轴方向的移动及装置绕Z轴的转动。
系统采用磁通路径控制原理进行悬浮力控制, 4点悬浮支承的工作原理完全相同,其悬浮力控制原理如图3所示。图3a所示永磁铁的N极处于正上方时的状态,即为系统的初始0°状态,此时,磁力线从永磁铁N极经由导磁体回到S极而不经过悬浮物,此时为零悬浮力状态,此特性可克服永磁悬浮系统的接触吸附问题。当永磁铁处于图3b所示任意角状态时,一部分磁力线由N极出发,流经右导磁体、导轨、左导磁体回到S极。此时在导磁体与悬浮物间产生悬浮力F。利用这种原理,通过改变永磁铁转动角度来控制流经导轨的磁通量,达到控制悬浮力的目的。4点悬浮支承的有效联合工作可以实现无尘传送装置的稳定悬浮。

图3 悬浮力控制原理图
2悬浮系统的数学模型
为了分析该永磁悬浮无尘传送系统的悬浮特性,在忽略控制器及控制电路的条件下,建立系统的三自由度机械动力学模型。
2.1装置的力学模型
在忽略漏磁、边缘效应以及导磁体磁阻的基础上,建立如图4所示的三自由度无尘传送悬浮系统的力学模型。 模型中规定系统的稳定悬浮状态为:所有悬浮支承面与悬浮导轨间的气隙均相同,装置所受悬浮力之和与装置的自身重力平衡。表1给出了图4所示三自由度悬浮系统的主要物理参数及其在平衡位置下的参数值。表2说明了平衡位置下的系统变量。

图4 三自由度无尘传送悬浮系统的力学模型
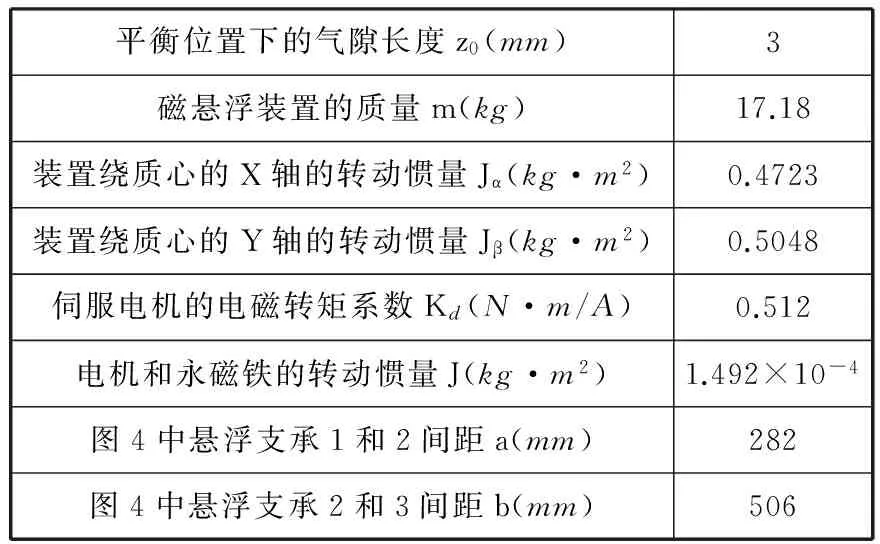
表1 系统参数的符号及其数值

表2 有关物理变量的符号及定义
取笛卡儿坐标原点为装置处于平衡位置时的质心O处,在装置运动过程中,会出现装置的质心偏离平衡位置而移动到O′点,设O′点的广义坐标为
q=(z,α,β)T
(1)
定义z的正方向为竖直向上,α的正方向为从X轴正向看顺时针方向,β的正方向为从Y轴正向看顺时针方向。在平衡位置时关于转动的量均为零,因此与转动有关的量是绝对量,而与Z轴方向有关的量是相对变化量。
整个悬浮系统在结构上可视为一个刚体,定义系统在悬浮支承处的广义坐标为
(2)
则磁悬浮装置的质心的变化量与悬浮支承处的气隙变化量的坐标变换关系为
(3)
式中,a为悬浮支承1与2(或3与4)质心间的距离,b为悬浮支承1与4(或2与3)质心间的距离,如图4所示。
磁悬浮装置的动能Ek可表示为
(4)
将式(3)代入式(4)可得
(5)
根据拉格朗日方程,忽略系统的势能,得到系统在悬浮支承处以广义坐标表示的动力学方程为
(6)
2.2悬浮支承的数学模型
将每个悬浮支承看作一个小系统模型,如图5所示,每个悬浮支承提供的悬浮力f 和永磁铁受到扭矩TL的数学模型分别为
(7)
(8)
式中,Km为悬浮力系数;KT为扭矩系数;θ为永磁铁转角;zj为导磁体与导轨间的气隙长度;dm为悬浮支承结构影响悬浮力的气隙补偿系数。

图5 单个悬浮支承模型
当整个装置出现偏离平衡位置的微动时,在广义坐标qb下,每个悬浮支承处的电机的输入电流、永磁铁的转角和悬浮气隙长度均产生相应微变化。定义沿Z轴方向向上为正(气隙长度变小),永磁铁的回转角度逆时针方向为正,作用在整个系统上的微动悬浮力(合外力)Fj为
Fj=kz1zj+kθ1θj
(9)
其中,kz1为悬浮支承的开环力-位移刚度;kθ1为悬浮支承的开环力-转角刚度,且
每个永磁悬浮支承部分中的永磁铁的微分方程可表示为
(10)
其中,kz2为悬浮支承的永磁铁的开环扭矩-位移刚度,kθ2为悬浮支承的永磁铁的开环扭矩-转角刚度,且
将式(9)和式(10)联立,得到整个装置的动力学模型如下:
(11)
式中,c2为系统的阻尼系数。
由式(11)可以看出,在考虑永磁铁转角θ这一中间状态变量后,整个系统的状态空间方程阶数会增加一倍,这给系统的性能分析以及控制器的设计,甚至控制系统所需硬件带来很高的要求。可将中间变量用另一个状态变量z和输入量i表示出来,由式(10)得出:
(12)
将式(12)代入式(9)中,有
(13)
2.3系统的降阶优化
本文所构建的四点支撑永磁悬浮系统为柔性系统,但悬浮装置本体为刚性结构,可视为刚体。由图4可知,悬浮系统Z轴方向上的4个悬浮支承确定了在该轴方向的位移,又因为三点可确定一个平面,因此,可由下式消除Z轴方向多余的控制量:
z1+z3=z2+z4
(14)
式(5)可表示为
(15)
根据拉格朗日方程对悬浮支承1、2、3处的动能求导得出系统机械动力学微分方程:
(16)
并令矩阵N的逆矩阵为
3系统的悬浮特性分析
为了判断系统的悬浮特性,将以上建立的系统动力学方程用状态空间方程表示为

(17)
其中,O为三阶零矩阵,I为三阶单位矩阵,且
系统的可控性矩阵PC和可观测矩阵PO分别为
(18)
(19)
因为矩阵A1、B1和I均为非零矩阵,所以式(18)中的可控性矩阵PC是列满秩的,式(19)中的可观测矩阵PO是行满秩的,即判定模型变换后的系统是可控可观测的。另外,在式(17)中,状态量z1与输入量i1之间的关系式为
(20)
其他状态量与输入量之间的关系结构上与式(20)类似,所以可以看出,不仅状态量zj之间有耦合,而且状态量zj与输入量ij之间也有耦合,这给控制系统的设计带来很大的困难。
3.1线性二次最优控制(LQR)的仿真
为验证本系统悬浮可行性及系统响应特性,根据表1中的数据和LQR控制策略,进行系统的悬浮及响应特性数学仿真。最优状态控制原理框图见图6,LQR实质上是确定最优控制矩阵K。系统状态空间方程的系数矩阵分别为



图6 线性二次最优状态控制框图
根据期望的性能指标选取状态量和输入量的权重参数分别为

得到最优控制器中的控制矩阵(反馈矩阵)为

设置最优状态控制器参数进行仿真分析。当悬浮系统处于稳定悬浮状态下时,在悬浮支承1处给予0.1 mm的阶跃输入,而在悬浮支承2和3处没有输入,系统的响应结果如图7所示。

图7 LQR仿真结果
从图7中可以看出,在系统没有解耦的情况下,对一个悬浮支承给予输入,会导致三个电机的控制电流变化和三个悬浮支承的位移变化,这验证了前文论证出的在系统未解耦时不仅状态量之间有耦合,而且状态量与输入量之间也有耦合的结论。
另外,由图7还可以看到,电机1的控制电流与电机2和电机3的控制电流相比变化明显,悬浮支承1的位移比悬浮支承2和悬浮支承3的位移变化更加明显。这是因为对悬浮支承1的阶跃输入,主要会引起电机1的控制电流变化和悬浮支承1的位移变化,但是系统本身是刚性的,且系统未解耦,所以也会引起电机2和电机3的控制电流和悬浮支承2和悬浮支承3的位移有较小的变化。进一步说明,当给悬浮支承以向上微动(气隙长度减小)的阶跃输入时,电机控制电流先迅速增大,永磁铁从初始平衡的角度向转角增大方向微转,悬浮力增大,大于悬浮装置的重力,使悬浮气隙减小。随后,为了达到新的平衡状态,电机电流迅速减小,反作用扭矩使永磁铁迅速向角度减小的方向旋转,减小悬浮力以平衡重力。在新的状态下,电机的控制电流略微减小,悬浮物向上微动致使气隙长度变小。因为系统是刚性的,电机2的控制电流与电机1的控制电流变化趋势相反,电机3的控制电流与电机1的控制电流变化趋势相同,但是电机2和电机3的响应程度均很小。悬浮支承2的位移响应同悬浮支承1的位移响应相反,悬浮支承3的位移响应同悬浮支承1的位移响应相同。
当给悬浮支承2(或3)以阶跃输入,而悬浮支承1和3(或2)没有输入时,系统的响应情况与上述响应情况类似,在此不再赘述。
3.2线性状态反馈解耦集中控制
为了使系统容易控制,需要将以上耦合的系统解耦,采用状态反馈解耦方法,如图8所示,其中反馈方程为
U=QV-KX
(21)
式中,Q为输入变换矩阵;V为状态反馈解耦后的输入向量;K为非奇异反馈矩阵。
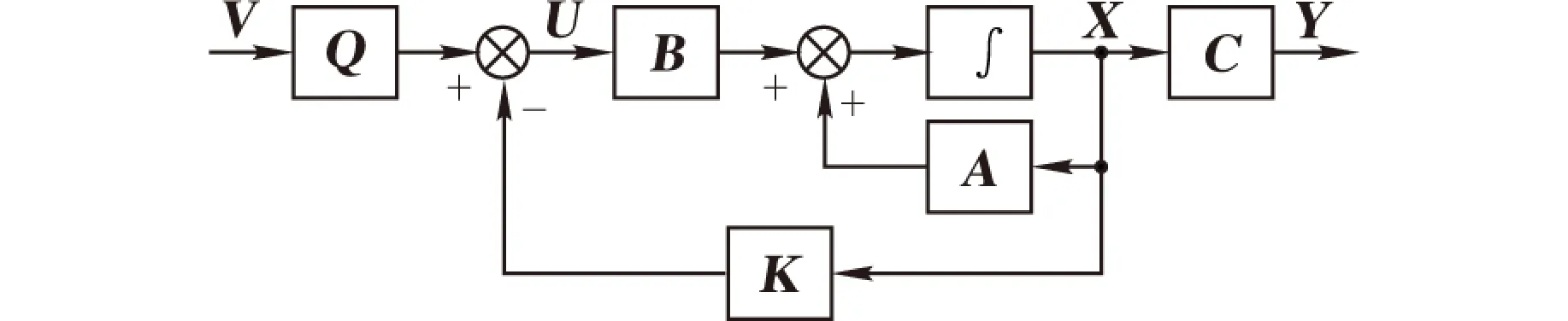
图8 系统线性状态反馈解耦框图
设c1、c2和c3为系统输出矩阵C的行向量,采用状态反馈控制方式使图8所示系统解耦的充要条件为3×3的矩阵E为非奇异矩阵。其中
式中,di(i=1,2,3)为从0到2之间的某一正整数n,并满足
对于所有的j(j=0,1,2),当ciAjB=[000]时,di取n-1;如果ciAjB≠[000],取最小j值。
(1)求E。当j=0时,ciAjB=[000],得di≠0;当j=1时,c1AB=b4,c2AB=b5,c3AB=b6。其中,b4、b5、b6为矩阵B1的行向量,a1、a2、a3为矩阵A1的行向量,均为非零向量,所以可取di=1。则有
(2)选取反馈矩阵
Q=E-1K=E-1F
得到解耦后的闭环系统的状态空间表达式为
(22)
式(22)为积分型解耦系统的状态空间,系统是不稳定的,但可以通过状态反馈把系统的极点配置到所需要的位置上。
(3)引入状态的线性非奇异变换

i=1,2,3di=1

再引入状态反馈矩阵 ,得到新的输入矩阵Q和反馈矩阵K为
达到解耦控制的效果,并且实现解耦控制后的单输入-单输出的极点配置。

根据表1中的悬浮系统的结构参数数据,取定输入变换矩阵Q和非奇异反馈矩阵K分别为

代入数据整理后得到状态反馈解耦后的系统状态空间方程如下:
设置状态反馈解耦后的三个控制器的PID参数均为KP=32 340,KI=0,KD=523,得到仿真后的系统响应结果如图9所示。图9中示出了各输入情况,电机控制电流i1、i2、i3和位移z1、z2、z3的响应情况,可以看到采用以上策略后,系统确实得到了解耦。给悬浮支承1处0.1 mm的阶跃输入,而悬浮支承2和悬浮支承3处没有输入,与图7相比较,只有电机1的控制电流和悬浮支承1处的位移有响应,电机2与电机3的控制电流和悬浮支承2与悬浮支承3处的位移均无变化,保持原来的状态,实现了集中解耦控制。对于悬浮支承1处,电机的控制电流首先迅速增大,永磁铁向转角增大的方向转动使悬浮力增大,悬浮气隙长度减小,达到新的平衡位置,电机的电流变小。
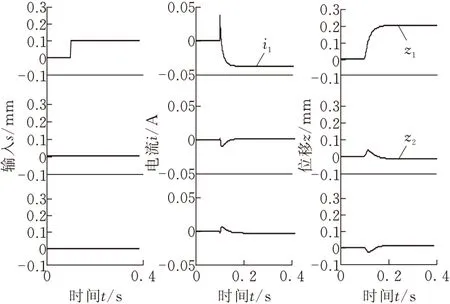
图9 线性状态反馈解耦集中控制的仿真结果
4结论
本文介绍了一种永磁悬浮无尘传送系统,采用可变磁路控制方式,实现悬浮力的实时控制。通过消除多余的悬浮支承控制点,建立了传送系统的机械动力学模型,应用LQR控制方法仿真分析了系统的悬浮响应情况,证明了该系统悬浮的可行性,同时也表明系统存在耦合性和不易控制性。采用系统状态反馈解耦集中控制策略,对系统进行了解耦控制仿真分析,结果表明该方法可以使系统解耦并且响应较快,稳定性较好。
参考文献:
[1]Li Hua, Wang Bo, Zhou Shunyuan. SlidingMode Control Based on Fuzzy approaching Law of Hybrid Suspension System[C]//Proceedings of the 8th World Congress on Intelligent Control and Automation, IEEE. Jinan, China, 2010: 3712-3716.
[2]张耿, 李杰. 低速磁浮列车竖曲线电磁力计算[J]. 中国电机工程学报, 2012, 32(3): 150-156.
Zhang Geng, Li Jie. Calculation of Electromagnetic Force of Low-speed Maglev on a Vertical Curve[J].Proceedings of the CSEE, 2012, 32(3): 150-156.
[3]吴华春, 王志强, 龚高, 等. 离心式磁悬浮血泵用混合磁悬浮支承设计与仿真[J]. 中国机械工程, 2013, 24(18): 2421-2422.
Wu Chunhua, Wang Zhiqiang, Gong Gao, et al. Design and Simulation of Hybrid Maglev Supporting for Centrifugal Maglev Blood Pump[J]. China Mechanical Engineering, 2013, 24(18): 2421-2422.
[4]王伟明, 马树元, 闪明才, 等. 磁悬浮运动平台的非线性变结构控制[J]. 组合机床与自动化加工技术, 2012(3): 69-72.
Wang Weiming, Ma Shuyuan, Shan Mingcai, et al. Non-linear Variable-structure Control of Maglev Motion Stage[J]. Modular Machine Tool & Automatic Manufacturing Technique,2012(3): 69-72.
[5]段吉安, 郭宁平, 周海波. 一种新型磁悬浮直线运动平台的热分析[J]. 中国电机工程学报,2011,15(31):114-115.
Duan Ji’an, Guo Ningping, Zhou Haibo. Thermal Analysis of a Novel Linear Maglev Transportation Platform[J].Proceedings of the CSEE, 2011,15(31):114-115.
[6]胡汉辉, 谭青. 磁悬浮平台的解耦模糊PID控制[J]. 中南大学学报(自然科学版), 2010, 40(4): 963-967.
Hu Hanhui, Tan Qing.Decoupling Fuzzy PID Control for Magnetic Suspended Table[J]. Journal of Central South University (Science and Technology), 2010, 40(4): 963-967.
[7]张云鹏, 刘淑琴, 李红伟, 等. 基于磁路分析的轴向混合磁轴承径向承载力解析计算[J]. 电工技术学报, 2012, 27(5): 137-142.
Zhang Yunpeng, Liu Shuqin, Li Hongwei, et al. Calculation of Radial Electromagnetic Force of Axial Hybrid Magnetic Bearing Based on Magnetic Circuit Analysis[J]. Transactions of China Electrotechnical Society, 2012, 27(5): 137-142.
[8]韩邦成, 崔华, 汤恩琼. 基于滑模扰动观测器的磁轴承主动振动控制[J]. 光学精密工程, 2012, 20(3): 563-570.
Han Bangcheng, Cui Hua, Tang Enqiong. Vibration Suppression of Magnetic Bearing Based on Sliding Mode Disturbance Observer[J]. Optics and Precision Engineering, 2012, 20(3): 563-570.
[9]项倩雯, 孙玉坤, 张新华. 磁悬浮开关磁阻电机建模与参数优化设计[J]. 电机与控制学报, 2011,15(4):74-79.
Xiang Qianwen, Sun Yukun, Zhang Xinhua. Modeling and Parameters Optimal Design of Bearingless Switched Reluctance Motor[J]. Electric Machines and Control, 2011, 15(4): 74-79.
[10]宋文荣, 陈阳, 宋晓东, 等. 磁悬浮进给机构的磁力耦合[J]. 光学精密工程, 2004, 12(4): 411-414.
Song Wenrong, Chen Yang, Song Xiaodong, et al. Magnetic Force Coupling in Maglev Feeding Mechanism[J]. Optics and Precision Engineering, 2004, 12(4): 411-414.
[11]Morishita M. An Adaptive-controlled Self-gapdetecting Electromagnetic Suspension System[J]. 2006 IEEE InternationalSymposium on Industrial Electronics, 2006, 1/7: 2562-2565.
[12]Cui Peng, LI Jie, Liu Desheng. Carrying Capacity for the Electromagnetic Suspension Low-speed Maglev Train on the Horizontal Curve[J]. Science China (Technological Sciences), 2010, 53(4): 1082-1087.
[13]龙鑫林,佘龙华,常文森.电磁永磁混合型EMS磁悬浮非线性控制算法研究[J] .铁道学报, 2011, 33(9): 36-39.
Long Xinlin, She Longhua, Chang Wensen. Study on Nonlinear Control Method for Hybrid EMS Maglev Train[J]. Journal of the China Railway Society, 2011, 33(9): 36-39.
[14]赵春霞,佘龙华,常文森.高速磁浮列车单转向架弯道运行导向系统研究[J] .铁道学报,2011,33(7):32-37.
Zhao Chunxia, She Longhua, Chang Wensen. Research on Guidance System for Single Bogie of High-speed Maglev Train in the Curve Negotiation[J]. Journal of the China Railway Society, 2011, 33(7): 32-37.
[15]Li Jinhui, Li Jie, Zhang Geng. A Practical Robust Nonlinear Controller for Maglev Levitation System[J]. Journal of Central South University,2013,20: 2991-3001.
[16]Feng Sun, Koichi Oka. Development of Noncontact Suspension Mechanism Using Flux Path Control Disk Magnet Rotation[J]. Transactions of theJapan Society of Mechanical Engineers, 2010, 76: 2916-2922.
[17]孙兴伟, 路英园, 孙凤, 等. 可变磁路式永磁悬浮系统的动力学特性研究[J]. 中国机械工程, 2014, 25(20): 2782-2787.
Sun Xingwei, Lu Yingyuan, Sun Feng, et al. Research on Dynamics Performance of Permanent Magnet Suspension System with Variable Magnetic Circuit[J]. China Mechanical Engineering, 2014, 25(20): 2782-2787.
(编辑王艳丽)
SimulationAnalysisonSuspensionCharacteristicsandDecouplingControlforDust-freeTransitSystemUsingPermanentMagneticSuspension
JinJunjieDuanZhenyunSunFengLuYingyuan
ShenyangUniversityofTechnology,Shenyang, 110870
Abstract:This paper proposed a dust-free transit system using permanent magnetic suspension. In this transit system, four non-contact suspension supports were arranged in two lines symmetrically using active permanent magnetic suspension technology.In each suspension support, the disk permanent magnet driven by a servo motor produced the magnetic force and the magnetic suspension force between the support and the iron guide rail was controlled in real-time. This paper gave the dynamics model after eliminating redundancy control points of suspension force, and analyzed the suspension characteristics of undecoupled system by numerical simulation using LQR control method. The simulation results indicate that the transit system is coupled and not easy to control. Moreover, the numerical simulation was done with the state feedback decoupling control strategy. The results show that the decoupling control strategy improves the control characteristics of the transit system, which has a good stabilities and response characteristics.
Key words:dust-free transit;permanent magnetic suspension;variable magnetic circuit; state feedback decoupling
收稿日期:2015-03-07
基金项目:国家自然科学基金资助项目(51105257,51310105025); 辽宁省高等学校杰出青年学者成长计划资助项目(LQJ2014012); 中国博士后科学基金资助项目(2015M571327);国家科技支撑计划资助项目(2014BAF08B01)
中图分类号:TH113
DOI:10.3969/j.issn.1004-132X.2016.04.017
作者简介:金俊杰,女,1982年生。沈阳工业大学机械工程学院博士研究生。主要研究方向为磁悬浮技术与数控技术。发表论文10余篇。 段振云,男,1971年生。沈阳工业大学机械工程学院教授、博士研究生导师。 孙凤,男, 1978年生。沈阳工业大学机械工程学院副教授、博士。路英园,男,1986年生。沈阳工业大学机械工程学院硕士研究生。
