基于图论的可控装载机构构型设计及其应用
2016-06-23蔡敢为朱凯君李俊明王小纯
张 林 蔡敢为 朱凯君 李俊明 王小纯
广西大学广西制造系统与先进制造技术重点实验室, 南宁,530004
基于图论的可控装载机构构型设计及其应用
张林蔡敢为朱凯君李俊明王小纯
广西大学广西制造系统与先进制造技术重点实验室, 南宁,530004
摘要:基于图论相关理论对一种新型装载机工作装置进行了全面、系统的构型设计与研究。利用胚图插点法对九杆以内只含单铰转动副的平面闭环两自由度机构进行了构型综合,得到了51种拓扑图;根据可控装载机构拓扑结构要求、功能性要求、约束条件要求以及拓扑结构最简原则对得到的拓扑图进行了拓扑综合,共筛选出了22种满足构型要求的拓扑图;再根据提出的机架存在条件、铲斗存在条件、动臂存在条件对得到的所有拓扑图进行了特定化;最后提出可控装载机构优选原则,对拓扑图特定化方案进行优选和具体化,获得了11种可控装载机构。通过样机研制验证了构型设计的合理性。
关键词:装载机;工作装置;拓扑胚图;拓扑综合;可控装载机构
0引言
工作装置是装载机进行铲装作业的主要部件,其设计直接决定了装载机的作业性能和效率[1]。装载机工作装置由过去大量采用的反转“Z”形连杆机构、正转六杆机构、正转八杆机构发展到卡特彼勒公司的八杆平行结构以及沃尔沃公司的TP连杆机构,大幅改善了铲斗平移性及举升性能。随着施工建设由过去的大拆大建向精细化施工发展,以及“数控一代”装备创新工程的实施,对工程机械产品的性能要求不断提高,小型化、智能化、节能环保型已成为装载机技术发展的主要方向,采用新结构、新技术进行新型工作装置研发设计已成为工程机械技术发展的重要趋势[2-4]。
现有装载机工作装置普遍采用液压系统,而液压系统存在传动效率低、能耗大等缺陷[5-8],限制了纯电动技术在装载机领域的应用。可控机构输出运动具有柔性、可控、可调的特点,为了克服现有装载机工作装置的不足,蔡敢为等[9]提出了一种应用可控机构原理的新型可控装载机构,该装载机构取消了液压传动系统,改由电传动系统通过计算机编程进行驱动控制,实现了多自由度运动输入,复杂轨迹输出,既克服了传统液压装载机能耗高、可靠性差等缺点,又克服了传统机械式装载机动作单一、运动缺乏柔性等缺点,非常适用于小型全电动装载机。机构拓扑创新是机械发明中最具挑战性和发明性的核心内容[10],型综合是进行机构创新的有效手段,为了获得满足设计要求的最佳构型,现对可控装载机构进行构型综合研究。
1可控装载机构构型综合方案
可控装载机构采用平面闭环低副机构,平面机构常用的构型综合方法有阿苏尔杆组法[11-12]、图论法[13-14]和基于螺旋理论、李代数等现代数学的型综合方法[15-16]。现有的构型综合方法通常针对特定条件下基本运动链进行综合,而在运动链特定化方面,目前尚缺少有效的特定化方法,难以获得全部可行机构构型。为了获得全部满足装载机功能要求的拓扑结构,现提出一种基于图论相关理论[14,17-20]的可控装载机构构型综合方案,如图1所示。

图1 可控装载机构构型综合方案
2可控装载机构构型分析
2.1构型分析
用点表示运动链中的构件,线来表示运动副,将运动链中的构件连接关系表示成点和线的连接关系,便得到了运动链的拓扑图,拓扑图与机构具有一一对应关系;若去掉拓扑图中表示二副构件的点,便得到了运动链的拓扑胚图。
将液压缸视为由移动副连接而成的两杆运动链,则现有装载机工作装置均为平面闭环两自由度机构,构件数目主要有7,9,…。图2a所示为现有装载机最常用的九杆两自由度反转工作装置,图2b所示为其拓扑结构。

图 2 现有工作装置构型分析
2.2构型设计要求
为了便于构型设计和综合,结合现有装载机工作装置构型以及可控机构式工程机械特点,针对可控装载机构提出以下构型要求:①根据装载机工作原理和运动要求,可控装载机构应为平面闭环两自由度机构;②为提高装载机工作装置可靠性,降低能耗,可控装载机构各构件间运动副应避免使用移动副,而应采用可靠性、传动效率更高的转动副;③在满足作业要求的情况下,为降低制造成本和结构复杂度,可控装载机构构件数目应控制在九杆以内。
3平面机构综合
3.1类配方案
为了获得九杆以内可控装载机构各构件组合类型,根据平面机构自由度计算公式对杆件数目小于9的平面闭环两自由度连杆机构进行了杆件类配,共得到了7种杆件类配方案,如表1所示(表中n表示构件总数,ni表示含i个运动副的构件数目)。

表 1 运动链杆件类配方案
3.2基于胚图插点法的平面机构综合
胚图插点法[19]主要步骤可概括为:首先根据类配方案构件中所含运动副大于2的构件数量,通过图论相关方法[18]获得拓扑胚图方案,再根据二副构件数量在拓扑胚图中插入二度点,最后利用拓扑图同构判断的相关方法[20],删除同构和含消极子链的拓扑图,便得到所类配方案对应的所有拓扑结构。表1对应的拓扑胚图共有10种,具体如表2所示。
根据各类配方案中二副构件数量,在表2所示拓扑胚图中插入二度点,并去掉同构及含消极子链的拓扑结构,便得到了所有51种平面五、七、九杆机构拓扑图,如表3所示。表3中,N.X.Y表示胚图代码,其中N表示杆件数目,X表示类配方案,Y表示胚图类型。

表2 拓扑胚图类型

表3 平面五、七、九杆机构拓扑图
为了便于识别各拓扑图,对各胚图对应的拓扑图从左向右,从上往下依次用数字i(i=1,2,…,16)进行标号,并用代码N.X.Y.i表示拓扑图;例如9.Ⅴ.a.1表示拓扑胚图9.Ⅴ.a对应的第一幅拓扑图。
4可控装载机构拓扑综合
表3所示51种平面五、七、九杆拓扑图中,并非每种拓扑结构都满足可控装载机构需要,也并非一种拓扑结构只对应一种装载机构类型,所以无法直接进行运动链及特定化转换,为获得满足可控装载机构需要的拓扑图及特定化方案,现基于装载机工作装置功能要求以及可控装载机构结构特点进行拓扑综合。
4.1拓扑综合基础
为了方便可控装载机构拓扑综合研究,现提出一些基本概念,以及可控拓扑图功能性构件存在条件。
4.1.1基本概念
(1)拓扑图功能点。拓扑图中,代表不可或缺构件且对机构功能的完整性起决定作用的点称为拓扑图的功能点。在拓扑图中代表可控装载机构机架、铲斗、主动杆和动臂的点称为可控装载机构的功能点。
(2)拓扑图非功能点。拓扑图中,除功能点外,其他代表机构连杆等构件的点称为非功能点。如代表可控装载机构连杆、拉杆、摇臂等构件的点称为非功能点。
(3)拓扑图等价点、等价支链、等价回路。在拓扑图中,一些位置的点是完全等价的,这样的点称为拓扑图等价点,由等价点构成的支链称为等价支链,由等价支链构成的回路称为等价回路。
4.1.2拓扑图功能性判定准则
拓扑图中是否存在满足可控装载机构功能性要求的功能点,是判断拓扑图是否满足装载机构型要求的基本条件。为方便从51种拓扑图中筛选并确定符合可控装载机构功能性要求的拓扑结构,现提出以下功能性条件。
(1)机架存在条件。可控装载机构机架同时与两主动杆、动臂连接,机架构件所含运动副数目不小于3。因此在拓扑图中,存在机架功能点的条件是拓扑图中必须存在度d≥3的点。
(2)主动杆存在条件。两主动杆同时连接在机架上,为避免发生刚性破坏,由两主动杆构成的回路自由度应为2。因此在拓扑图中,与机架功能点邻接的点至少应有三个,除一个代表动臂功能点外,必须存在两个主动杆功能点,且两主动杆功能点构成的任意回路自由度必须等于2。
(3)铲斗存在条件。作为铲斗的构件应为两副构件,为避免冲击,铲斗与机架之间应连接有动臂;铲斗作为装载机构的执行构件,应满足装载机对工作装置的灵活度要求,即铲斗的自由度必须等于2。因此在拓扑图中,铲斗功能点的度d=2;机架功能点与铲斗功能点之间应存在动臂功能点;由机架功能点和铲斗功能点构成的任意回路自由度必须等于2。
(4)拓扑图最简条件。为了降低制造成本和自重,可控装载机构中不应存在由自由度为零的基本杆组构成的运动支链,可控装载机构应满足机构最简要求。因此在拓扑图中,除功能点外,任何回路中都不应该存在两个及两个以上邻接的非功能点。
拓扑图必须同时满足上述4项功能性条件,才可以作为可控装载机构的可行拓扑结构。
4.2拓扑综合方案
拓扑综合一方面可以筛选出可行的拓扑图,另一方面可以对可行拓扑图进行特定化,确定拓扑图中的功能点。可控装载机构拓扑综合过程可概括为:首先对表3中各拓扑图进行赋权,再根据可控装载机构机架存在条件、铲斗存在条件、主动杆存在条件,对拓扑图进行特定化,再根据拓扑图最简条件,对特定化后的拓扑结构进行筛选,最终得到可控装载机构可行拓扑结构方案。拓扑综合过程如图3所示。

图3 可控装载机构拓扑综合方案
4.3拓扑综合
对表3所示51种拓扑图进行综合,共筛选出了22种满足可控装载机构构型要求的拓扑图(表4),其中七杆构型有2种,九杆构型有20种,并通过拓扑图特定化,确定机架功能点、铲斗功能点、动臂功能点、主动杆功能点,共获得了59种拓扑图特定化方案,其中七杆构型2种,九杆构型57种,在特定化代码A.B.C(D.E)中,A表示机架功能点,B表示铲斗功能点,C表示动臂功能点,(D,E)表示两主动杆功能点。

表4 拓扑综合及特定化方案
5构型择优
为了从众多可行拓扑图特定化方案中,选取最具开发潜力的可控构型方案,现根据可控装载机构特点,从机构的设计和控制角度提出以下优选原则:
(1)可行拓扑图对应的特定化方案中,主动杆功能点的度d=2。为了降低可控装载机构耦合程度,简化运动学及动力学模型,方便进行结构设计和杆件尺度综合,应尽量避免主动杆与多个构件连接。因此,只保留主动杆功能点的度为2的方案。
(2)动臂功能点的度d≥3,且机架功能点、动臂功能点、铲斗功能点以及一个非功能点构成一个四杆回路。可控装载机构的运动主要依靠控制系统编程控制,动臂和铲斗运动的耦合程度决定了控制编程的难易。按动臂和铲斗运动的关联程度分为低耦合型机构和高耦合型机构,两类装载机构的主要区别在于动臂是否可以由某个主动杆锁死,且在此情形下,铲斗是否可以独立完成上限卸料工作。由于平面四杆机构为最简单的单自由度闭环机构,因此,当主动杆功能点、机架功能点、动臂功能点和一个非功能点构成四杆回路时,结构最简且可实现动臂锁定,此时拓扑图中动臂功能点的度d≥3。
根据上述两条优选原则,对表4中可控装载机构特定化方案进行筛选,共得到11种最佳构型方案,将其转换为可控装载机构简图,如表5所示。
6样机实验
为了验证可控装载机构构型方案的可行性,同时方便与现有装载机工作装置进行对比,从表5中选取与图2具有相同拓扑结构的特定化方案1.5.4(2,9)作为研究对象进行了开发设计,并以该构型为基础分别研制了一台小型样机,如图4所示,对可控装载机构控制、运动等进行实验验证。
在小型样机搭建基础上,研制了一台额定载重300kg,斗容0.2m3,举升高度不小于1400mm的全尺寸小型装载机,如图5所示。该全尺寸小型装载机与市场同类型装载机技术参数对比如表6所示,通过参数对比可知,在性能参数近似的情形下,新型装载机能耗大幅降低,在举升工况最大额定载重下,可控装载机构驱动系统总功率仅为1.75kW。

表5 最佳可控装载机构综合
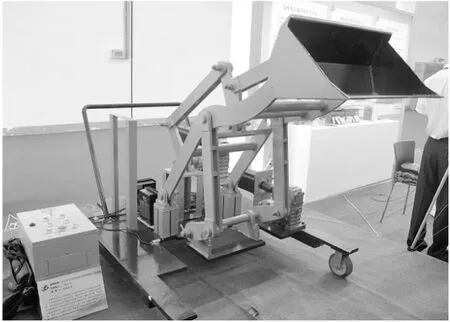
图4 小型可控装载机构样机

图5 全尺寸可控机构式装载机

表6 新型装载机与现有液压装载机技术参数对比
7结语
本文基于图论相关理论对一种新型装载机工作装置进行了全面、系统的构型设计与研究,提出了可控装载机构构型综合方案。根据可控装载机构构型要求,利用胚图插点法对九杆以内平面闭环两自由度连杆机构进行了构型综合,获得了全部51种拓扑图;提出了可控装载机构拓扑综合方案,并定义了拓扑图功能点、非功能点、等价点、等价支链、等价回路、特定化代码等概念,给出了拓扑图功能性判断准则,分析了机架、主动杆、铲斗存在条件以及拓扑图最简条件,通过可控装载机构拓扑综合,共得到了59种可控装载机构可行方案;通过提出构型优选原则,最终获得了11种最具开发潜力的可控装载机构。最后通过对一款构型进行样机试制,验证了可控装载机构的可行性,为该类型的可控机构式工程机械构型研究分析提供了借鉴和指导。
参考文献:
[1]王国彪,杨力夫.装载机工作装置优化设计[M].北京:机械工业出版社,1996.
[2]王世明,杨为民,李天石,等.国外工程机械新技术新结构和发展趋势[J].工程机械,2004(1):61-66.
WangShiming,YangWeimin,LiTianshi,etal.NewTechnologiesandStructuresofForeignConstructionMachineryandTheirDevelopingTrend[J].ConstructionMachineryandEquipment,2004(1):61-66.
[3]黄宗益.轮式装载机的发展趋势[J].工程机械,1996(3):25-29.
HuangZongyi.DevelopingTrendofWheelLoaders[J].ConstructionMachineryandEquipment,1996(3):25-29.
[4]邵宪琴,楼东.国外装载机的技术进步和发展趋势[J].建筑机械,1995(8):32-35.
ShaoXianqin,LouDong.TheTechnicalProgressandDevelopmentTrendonForeignLoader[J].ConstructionMachinery,1995(8):32-35.
[5]贾泽辉,吴学松.工程机械节能减排任重道远[J].建筑机械化,2013(3):31-34.
JiaZehui,WuXuesong.EnergyConservationandEmissionsReductionofConstructionMachineryRemainaDauntingTask[J].ConstructionMechanization, 2013(3):31-34.
[6]ZimmermanJ,PelosiM,WilliamsonC,IvantysynovaM.EnergyConsumptionofanLSExcavatorHydraulicSystem[C]//ASMEInternationalMechanicalEngineeringCongressandExposition.Seattle,WA,USA,2007:117-126.
[7]HeneyPJ.TheBigSpeakOutonEnvironmentallyFriendlySystems[J].Hydraulics&Pneumatics, 2005(5):26-28.
[8]HeneyPJ,FranzingerKA.FluidPower20/20[J].Hydraulics&Pneumatics, 2005(1):20-26.
[9]蔡敢为,张林,潘宇晨,等.一种多连杆装载机构:中国, 201110189561.7 [P]. 2011-07-07.
[10]高峰.机构学研究现状与发展趋势的思考[J].机械工程学报,2005, 41 (8):3-17.
GaoFeng.ReflectionontheCurrentStatusandDevelopmentStrategyofMechanismResearch[J].ChineseJournalofMechanicalEngineering, 2005, 41 (8):3-17.[11]ManolescuNI.AUnitaryMethodforConstructionoftheKinematicPlaneChainsandPlaneMechanisms
withDifferentDegreesofMobility[J].Rev.Roum.Sci.Tech.Ser.Mec.Appl. ,1964,9:1293-1313.
[12]ManolescuNI,EreceanuI,AntonescuP.DieKinematischenUnterschungsme-thodenEbenenGelenkgetriebeⅡ[J].Rev.Roum.Sci.Tech.Ser.Mec.Appl.,1964,9: 341-363.
[13]MoonYM,KotaS.DesignofReconfigurableMachineTools[J].ASMEJournalMechanicalDesign, 2002,124(3): 480-483.
[14]CrossleyFRE.ThePermulationsofKinematicChainsofEightMembersorLessFormtheGraphTheoreticPointofView[J].DevelopmentsinTheoreticalandAppliedMechanics, 1965, 2: 467-486.
[15]HuangZ,LiQC.GeneralMethodologyforTypeSynthesisofLower-mobilitySymmetricalParallelManipulatorsandSeveralNovelManipulators[J].InternationalJournalofRoboticsResearch, 2002, 21(2):131-146.
[16]HervéJM.AnalyseStructurelleDesMécanismesParGroupesDeDéplacements[J].MechanismandMachineTheory, 1978, 13:437-450.
[17]FreudensteinF,MakiER.DevelopmentofOptimumVariable-strokeInternal-combustionEngineMechanismfromtheViewpointofKinematicStructure[J].ASMEJ.ofMech.Trans.andAuto.inDesign, 1983,105:259-268.
[18]HarryF. 图论[M].北京:科学出版社,1979.
[19]杨廷力.机械系统基本理论----结构学·运动学·动力学[M].北京:机械工业出版社,1996.
[20]丁玲,路懿.运动链拓扑图的特征数组表示及同构判断[J].机械工程学报,2010,46(7):63-67.
DingLing,LuYi.CharacterArraysRepresentationandIsomorphismIdentificationofKinematicChainTopologyGraphs[J].JournalofMechanicalEngineering, 2010,46(7): 63-67.
(编辑王艳丽)
ConfigurationDesignandApplicationsofControllableLoaderMechanismBasedonGraphTheory
ZhangLinCaiGanweiZhuKaijunLiJunmingWangXiaochun
GuangxiKeyLaboratoryofManufacturingSystem&AdvancedManufacturingTechnology,GuangxiUniversity,Nanning, 530004
Abstract:A comprehensive and systemic configuration design and reseach of a new type loader work equipment were completed based on graph theory and other related theory. Using the technique of embryo graph vertex insertion configuration synthesis was carried out on two-DOF plate closed-loop mechanism within 9 members and only one hinge revolute joint, and then 51 kinds of topology graphs were obtained. According to the controllable loading mechanism’s requirements of structures, functions and constraints, and principles of minimalist topology, topological synthesis was realized on those 51 topology graphs. 22 kinds of topology graphs meeting the configuration requirements were found. Then according to proposed existence conditions of frame, bucket and boom all topology graphs were specialized. In the end, the optimization principle of loading mechanism was proposed, the scheme of specializing topology graphs were prefered. So 11 kinds of controllable loading mechanisms were obtained. Through developing a prototype based on one kind of those mechanisms, its working performance meets design requirements. This study provides a configuration basis for design and developing a new type controllable machinery loader.
Key words:loader; work equipment; topological embryo graph; topological synthesis; controllable loader mechanism
收稿日期:2015-04-22
基金项目:国家自然科学基金资助项目(51365004,51075077);广西自然科学基金资助项目(2014GXNSFDA11833);广西理工中心重点项目(T401440317); 广西高校现代设计与先进制造重点实验室开放课题资助项目
中图分类号:TH122;TU623.9
DOI:10.3969/j.issn.1004-132X.2016.04.012
作者简介:张林,男,1987年生。广西大学土木建筑工程学院博士研究生。主要研究方向为可控机构、机器人。发表论文10余篇。蔡敢为,男,1961年生。广西大学机械工程学院院长、教授、博士研究生导师。朱凯君,男,1990年生。广西大学机械工程学院硕士研究生。李俊明,男,1982年生。广西大学土木建筑工程学院博士研究生。王小纯,男,1957生。广西大学机械工程学院教授。
