软硬件冗余矿井提升机恒减速制动系统研制
2016-06-23黄家海郭晓霞赵瑞峰黎文勇麻慧君
黄家海 郭晓霞 权 龙 赵瑞峰 黎文勇 麻慧君
1.太原理工大学新型传感器与智能控制教育部重点实验室,太原,0300242.山西新富升机器制造有限公司,太原,030013 3.德国ITI有限公司,德累斯顿,01067
软硬件冗余矿井提升机恒减速制动系统研制
黄家海1郭晓霞1权龙1赵瑞峰2黎文勇3麻慧君1
1.太原理工大学新型传感器与智能控制教育部重点实验室,太原,0300242.山西新富升机器制造有限公司,太原,0300133.德国ITI有限公司,德累斯顿,01067
摘要:安全制动系统是提升设备的最后一道安全保障措施,其对提升机运行的安全性和可靠性具有重要意义。针对目前恒减速制动系统存在的不足之处,提出了一种基于软硬件冗余的恒减速制动系统改进方案。为了提高系统安全性和可靠性,在回路中采用了冗余热备用方法,使备用回路能够实时同步地替换故障回路。空载实验结果表明:该方案是可行的;由于受非线性、时变和延迟等因素影响,制动初期速度误差略大于制动末期误差。
关键词:恒减速制动;软硬件冗余;速度控制;矿井提升机
0引言
矿井提升装备承担着物料、人员和设备的提升、下放等重任,素有矿山“咽喉”之称[1]。安全制动系统是其最后一道安全保障系统,当遇到突发情况时,其能够避免重大事故发生并阻止事故进一步扩大。因此,一旦安全制动系统工作异常或未能实现有效制动,就会导致机毁人亡的重大事故[2-4]。
早期安全制动系统基本采用恒力矩制动(二级制动),其存在以下不足:①由于提升载荷方向和大小经常发生变化,容易导致安全制动速度波动范围大;②对于摩擦式提升装备而言,若提升载荷较大且提升高度较小,安全制动时容易发生钢丝绳打滑事故。基于以上原因,恒减速制动得到应用。国外恒减速制动系统生产厂家主要有ABB[5-6]、SIEMAG[5]等;国内只有少数企业能够在吸收消化国外技术基础上,生产类似产品。
研究人员对现有恒减速制动系统已开展较多研究,文献[6]利用比例溢流阀控制制动压力,并将神经元PID算法应用到控制器中。文献[7-9]研究了控制算法对恒减速制动系统性能的影响,控制对象同样是比例溢流阀。麻慧君[10]设计了全数字式恒减速制动PLC系统。Alec等[11]将分布式人工技术应用到缠绕式提升装备制动系统中。Wang等[12]利用LabView软件搭建了恒减速制动装置数据采集系统。
现有系统存在以下不足:①采用模拟信号控制,导致主备回路无法实时同步切换;②仅在关键部位采用冗余,一旦失效,系统启动恒力矩制动,导致制动冲击增大。
针对以上不足,提出了一种基于软硬件冗余的恒减速制动方案,该方案中所采用的冗余软硬件热备用方法可实现备用回路实时同步地替换故障回路,从而提高了系统的安全性和可靠性。
1软硬件冗余恒减速制动系统结构
系统结构如图1所示,电气控制部分采用双机热备方案,实现软件冗余;液压控制包括3条相互独立的恒减速制动子回路,如图2所示,每条支路均包括独立控制器、伺服比例阀和蓄能器等,3条支路采用动态安全冗余方案,只需其中任意2条子回路正常,系统便可正常运行,实现软硬件冗余;控制信号和卷筒转速反馈信号也同时施加给3条支路。

图1 软硬件冗余的恒减速制动系统结构图

图2 两用一备恒减速制动简化原理
在图2所示液压系统中,系统中每个硬件均采取冗余备用方案。液压动力源由定量齿轮泵和伺服电机组成,同时向3个蓄能器供油。恒减速制动回路主要包括伺服比例阀(图中EH1、EH2和EH3)、备用回路切换阀组和制动器。通过控制伺服阀输入信号,即可实现制动器压力控制;备用回路切换阀组用于将备用回路接入到系统中,同时将故障回路切除;液压控制子系统冗余切换服从电气控制子系统调度和决策。
系统中还保留了一级制动回路,当提升罐笼(或箕斗)距离井口或井底距离非常短时(如小于10m),电磁铁S5、S6、S7和S8同时断电。
2提升系统建模
图3说明了摩擦式提升装备安全制动的两种工况,即提升过程制动和下放过程制动,受到运行方向影响,两种工况下减速度值也不一样。
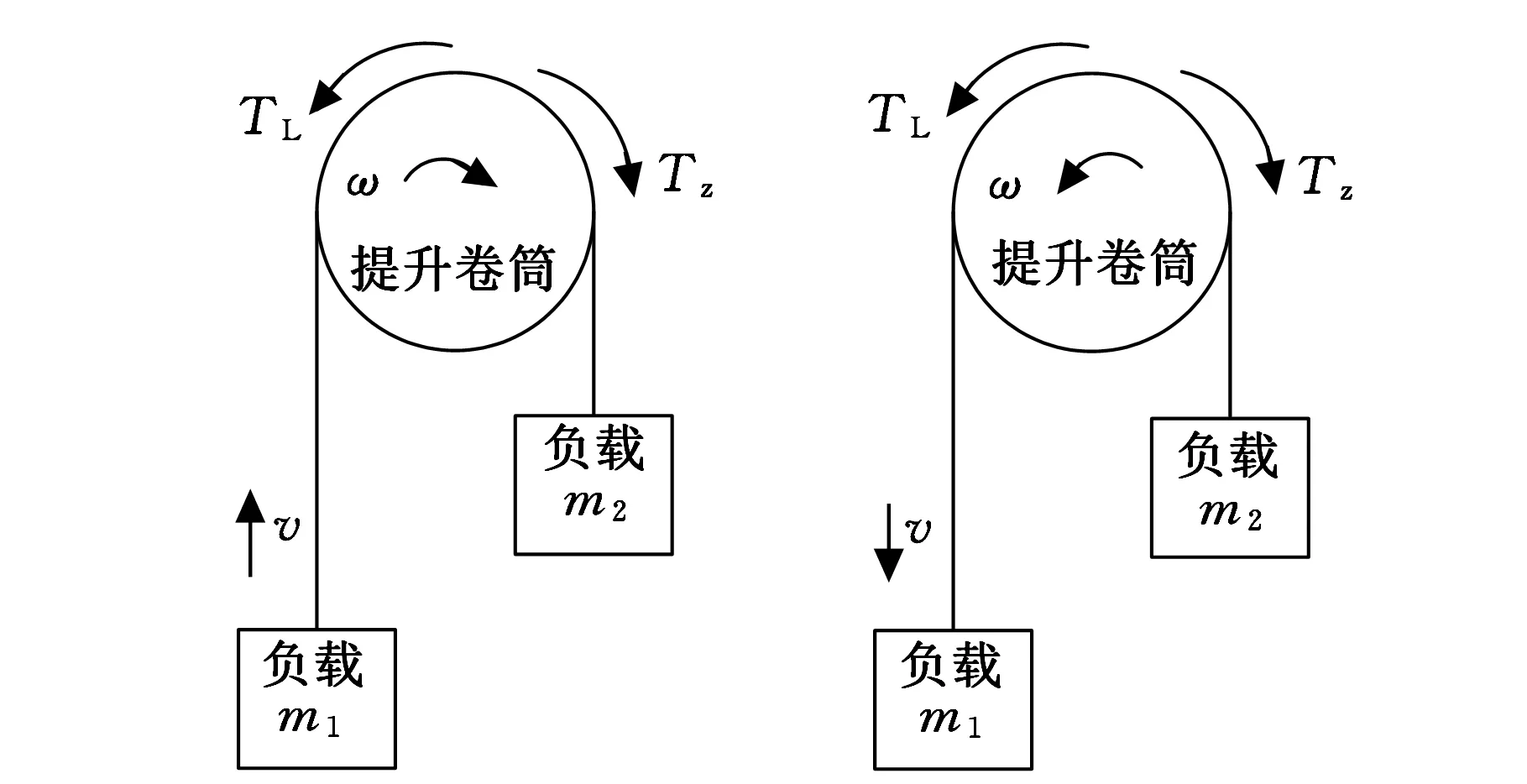
(a)提升过程制动(b)下放过程制动图3 提升机安全制动过程示意简图
上升阶段制动时,存在以下关系:
(1)
式中,Tz为制动力矩;TL为外负载、摩擦力等产生的力矩;J为总转动惯量;ω为卷筒角速度;t为时间。
下降阶段制动,存在以下关系:
(2)
Tz=fFzRn
(3)
式中,f为摩擦因数;Fz为制动器正压力;R为制动器距卷筒中心距离;n为制动器数量。
由图4可知,式(3)中Fz与制动压力pc、碟簧刚度k和预压缩量Δx0相关;假设k为常数,则当pc=0时,由于存在Δx0(图4a),则:
Fz=kΔx0
(4)

图4 盘形制动器正压力Fz计算简图
当提升机正常提升或下放时(图4b),制动压力为最大值pmax,此时Fz=0;当处于恒减速制动时(图4c),有:

(5)

Fz=kΔx0-pcA
(6)
由式(1)~式(3)和式(6)可得制动速度的表达式为
(7)
由式(7)可知,pc对制动速度有重要影响,若不考虑非线性、外负载时变(钢丝绳长度变化)和摩擦力矩等影响,只需控制pc即可实现制动速度的精确控制;但由于实际工况中存在诸多干扰因素,因此系统中通常还需采用速度闭环控制。
利用SimulationX建立图5所示的仿真模型,由于冗余回路结构相同,所以仿真模型中仅对其中一条进行仿真。在仿真模型中,将液压动力源和蓄能器简化成恒压源;用单向阀将比例阀其中一个油口堵住;利用力矩模块分别模拟外负载力矩和加载力矩。其他参数如下:卷筒直径D=4 m,制动压Fmax=100 kN,闸瓦摩擦因数f=0.4,最大工作油压pmax=12 MPa,活塞有效面积A=95 cm2。

图5 速度、压力闭环联合仿真模型
3实验与仿真结果分析
受实际生产条件和煤矿安全认证等因素限制,样机只能首先在生产车间中进行空载测试实验。制动压力pc测试结果如图6所示,给比例阀施加方波信号,使pc首先由6MPa增大到9MPa,保持约2.5s后,再减小到6MPa。由图6可知,在压力上升阶段,pc上升时间约为55ms,峰值时间约为110ms,最大超调量约为2.8%;在压力下降阶段,pc下降时间约为50ms,峰值时间约为80ms,最大超调量约为12.9%。测试结果表明该系统样机具有良好的动态特性。
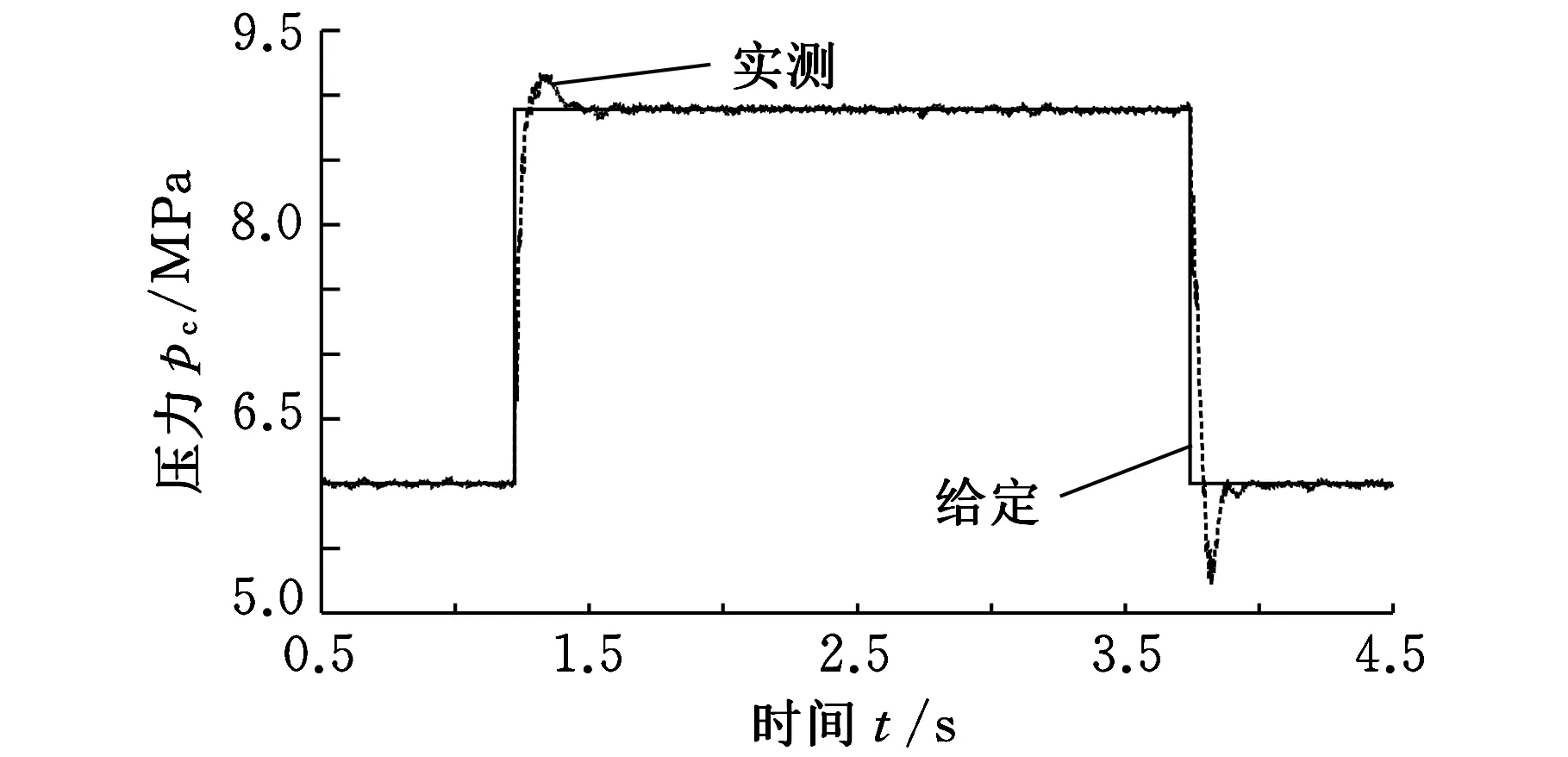
图6 制动压力实测曲线
图7所示为空载工况下实测值与仿真结果对比。由图7可看出,实验结果与仿真结果变化趋势一致,从而证明仿真结果具有一定精度,两者之间存在的误差主要与仿真模型中摩擦力矩、转动惯量等参数与实际参数不完全一致有关。

图7 加速度a=1.5 m/s2、v=3.7 m/s时仿真结果和实验结果对比
图8说明了外载质量对制动速度影响,由该图可知,当其他参数不变时,该系统依然能正常工作;但随外载质量增大,制动初期速度误差随之发生改变,总体趋势是误差随着外载质量增大而增大。由图9可知,当制动初速度v0达到16m/s,外载质量为40t时,制动速度与制动时间依然成线性关系。在图10中,当制动减速度达到4m/s2时,系统依然能够有效制动,此外随着减速度增大,制动时间将随之缩短。
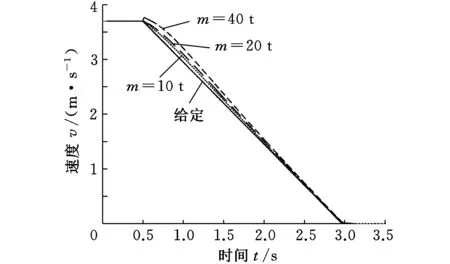
图8 外载质量对制动速度的影响(v0=3.7 m/s,a=1.5 m/s2)
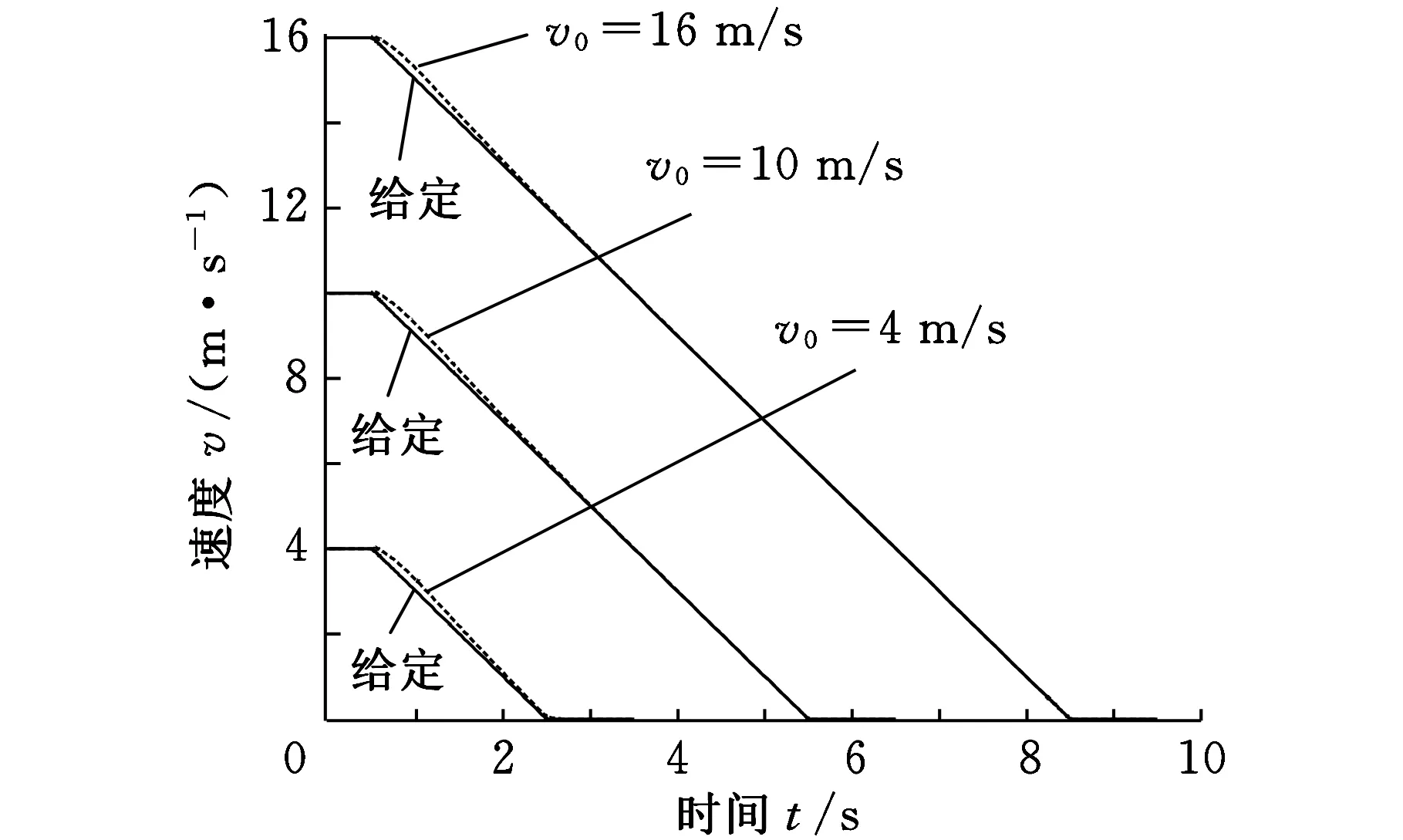
图9 初速度对制动速度的影响(m=40 t,a=2 m/s2)

图10 减速度对制动速度的影响(m=40 t)
4结论
本文针对目前恒减速制动系统存在的不足之处,提出了改进方案,在对其进行理论分析的基础上,研制了样机,在生产车间内对该样机进行空载实测,结果表明文中所提方案是可行的,系统在空载条件下能够正常工作;由于制动器空动行程,导致制动初期速度误差大于制动末期误差,若能进一步提高制动器控制压力动态响应速度,以及优化速度闭环PID控制器参数,则可有望减小制动初期速度误差;当控制系统其他参数不变时,制动速度误差随着外载荷增大而增大。
参考文献:
[1]贾现召, 潘为民, 张步斌,等. 基于虚拟设计制造技术的大型矿井提升装备开发. 中国机械工程, 2006,17(15):1563-1567.JiaXianzhao,PanWeimin,ZhangBubin,etal.DevelopmentofLargeMineElevatorBasedonTechniquesofVirtualDesignandManufacturing[J].ChinaMechanicalEngineering, 2006, 17(15):1563-1567.[2]中国煤矿安全网.斜坡提升事故安全分析[EB/OL].[2009-09-17].http://www.mkaq.cn/sgal/sgal/yssg/2009/0917/27692.html.
[3]中国煤矿安全网.五建公司二处东大项目部“3.18”重大提升运输死亡事故[EB/OL]. [2009-08-13].http://www.mkaq.cn/sgal/sgal/yssg/2009/0813/23194.html.
[4]新华网. 湖南冷水江一矿山发生罐笼坠落事故26人死亡5人受伤[EB/OL].[2009-10-08].http://news.xinhuanet.com/politics/2009-10/08/content_12195046.html.
[5]闫吉领, 朱述川, 王力. 浅析两种提升装备恒减速液压制动系统[J]. 煤矿机电, 2010(4): 84-86.
YanJiling,ZhuShuchuan,WangLi.BriefAnalysisofTwoHydraulicBrakingSystemsofConstantDecelerationforHoist[J].ColleryMechanical&ElectricalTechnology, 2010(4):84-86.
[6]刘大华, 张凤林, 王继生, 等. 一种矿井提升机恒减速安全制动系统及制动方法:中国,CN201857238U[P]. 2010-11-08.
[7]麻健, 李勇忠, 李凤兰. 提升机全数字控制恒减速紧急制动[J]. 太原理工大学学报, 2000, 31(1):36-38.
MaJian,LiYongzhong,LiFenglan.DigitalControlEmergencyBrakingofHoistwithConstantDeceleration[J].JournalofTaiyuanUniversityofTechnology, 2000, 31(1):36-38.
[8]XiaoXingming,WuJun,WangQian,etal.DynamicAnalysisandSimulationonMultiplexedControllableAntiskidDeviceofFrictionHoist[C]//Proceedingsofthe2010IEEEInternationalConferenceonInformationandAutomation.NewYork:IEEE,Harbin:2010:371-375.
[9]谭飞. 基于Matlab的矿井提升装备恒减速制动系统的改进研究与仿真[D]. 青岛: 山东科技大学, 2012.
[10]麻慧君. 矿用提升装备全数字软硬件冗余恒减速制动系统研究[D]. 太原:太原理工大学, 2013.
[11]AlecS,IanMM.DistributedIntelligentControlSystemforaContinuous-statePlant[J].IEEETransactionsonSystems,Man,andCybernetics,PartB:Cybernetics, 1997, 27(3):395-401.
[12]WangGuimei,WangQingdong,LiJingbo,etal.MineElevatorComprehensivePerformanceTestingSystemBasedonVirtualInstrument[C]//Proceedingsof3rdIndustrialelectronicsandApplication.NewYork:IEEE,2008:1027-1030.
(编辑袁兴玲)
DevelopmentofMineHoistConstant-decelerationEmergencyBrakingSystemwithSoftwareandHardwareRedundantDesign
HuangJiahai1GuoXiaoxia1QuanLong1ZhaoRuifeng2LiWenyong3MaHuijun1
1.KeyLaboratoryofAdvanceTransducersandIntelligentControlSystem,MinistryofEducation,TaiyuanUniversityofTechnology,Taiyuan,0300242.ShanxiXinfushengMachineManufacturingCo.,Ltd.,Taiyuan0300133.ITIGmbH,Dresden,Germany,01067
Abstract:Constant-deceleration emergency braking system was considered as the ultimate security measure of a mine hoist. It was of great significance for safety and reliability of the mine hoists. Aiming at the shortcomings of the present constant-deceleration emergency braking system, a constant-deceleration emergency braking system was presented herein based on software and hardware redundant design. In this system, the faulty circuit was replaced synchronously in real-time by the spare one because the hot spare was adopted in the redundant design. The numerical and experimental results under unloade show that the scheme is feasible. They also show that the speed tracking error at the early stages is higher than that at the last stages because of the nonlinearity, time-varying and delay.
Key words:constant-deceleration emergency brake; software and hardware redundancy; speed control; mine hoist
收稿日期:2015-05-04
基金项目:山西省煤基重点科技攻关项目(MJ2014-11);山西省国际科技合作项目(2015081017)
中图分类号:TD5
DOI:10.3969/j.issn.1004-132X.2016.04.009
作者简介:黄家海,男,1979年生。太原理工大学机械电子工程研究所副教授、博士。主要研究方向为液压元件、电液比例控制系统。郭晓霞,女,1990年生。太原理工大学机械电子工程研究所硕士研究生。权龙,男,1959年生。太原理工大学机械电子工程研究所教授、博士研究生导师。赵瑞峰,男,1965年生。山西新富升机器制造有限公司副总工程师。黎文勇,男,1972年生。德国ITI有限公司工程师。麻慧君,男,1983年生。太原理工大学机械电子工程研究所硕士研究生。
