离心锤变桨距机构设计与优化研究
2016-06-23席亮亮王海峰宋笔锋
席亮亮,王海峰,宋笔锋
(西北工业大学 航空学院,西安 710072)
离心锤变桨距机构设计与优化研究
席亮亮,王海峰,宋笔锋
(西北工业大学 航空学院,西安710072)
摘要:针对现有高空飞艇螺旋桨推进系统中,采用变桨距技术重量代价大、能源消耗多的问题,设计一种基于离心力的离心锤变桨距机构,分析该机构的工作原理,并利用ADAMS软件进行机构运动学和动力学仿真分析;对离心锤进行参数化建模,建立约束方程后,以桨距优化角为目标函数,对离心锤的空间位置进行优化。结果表明:当外界条件引起螺旋桨转速变化时,该机构可以很好地实现螺旋桨变桨距功能;在现有平台上,48°的离心锤安装角具有最优的变距效果。
关键词:飞艇;螺旋桨;变桨距;离心锤;仿真;参数优化
0引言
在气球的基础上发展而来的飞艇是一种具备自主动力、可控制的、轻于空气的航空器,近年来,全球范围的飞艇研制热潮正在兴起[1-3]。飞艇由巨大的流线型艇体、位于艇体下方的吊舱、起稳定控制作用的尾面和推进装置组成[4]。20 km高空的空气密度约为地面的1/20,在如此稀薄的空气下,不自带氧化剂的燃油发动机无法正常运行,因此电机与螺旋桨组合的推进方式被广泛采用[5-6]。
螺旋桨工况在高空和低空时变化范围很大,电机系统与螺旋桨在大范围变化的工况下很难保持较高的效率,存在按照高空(低空)环境设计的推进系统在低空(高空)时性能较差的问题。现阶段,在部分平流层飞艇的方案中,采用高空和低空两套动力系统并存的设计,虽然可以满足短时间的关键技术飞行演示,但是对于驻空时间很长的飞艇而言,其重量代价和能源浪费都太大。在高空飞艇的推进系统中应用变桨距技术,可以有效拓宽螺旋桨高度和速度的适用范围,从而改善推进系统的性能。
目前已经投入使用的变桨距机构主要有液压控制方案和电机控制方案两种,在各种工况下均可主动、精确地控制桨叶的桨距角,在直升机和风力发电机领域得到了大量应用[7-9],但由于两种方案的液压或电机系统都会带来较大的能源消耗,付出一定的重量代价,同时还增加了控制系统的复杂性,使其在高空飞艇平台中的应用受到极大限制[10-11]。
针对上述问题,本文设计一种基于离心力自驱动的高空飞艇螺旋桨变桨距机构——离心锤变桨距机构,详细分析该机构变桨距的工作原理,在虚拟样机的基础上开展多体动力学仿真,并结合仿真结果,对影响机构的主要参数进行优化。
1临近空间螺旋桨推进系统特性
在不同高度下,对某6.2 m临近空间螺旋桨进行仿真,得到的推进系统特性曲线如图1所示,抗风速度为10 m/s。

图1 某6.2 m螺旋桨推进系统特性曲线
从图1可以看出:随着高度的降低,螺旋桨转速明显降低,在1 km时螺旋桨的吸收功率仅约为20 km时吸收功率的1/3,表明螺旋桨低空时的推力下降,故研究一套简单可靠的变桨距机构是很有必要的。
2离心锤变桨距机构设计与工作原理
2.1离心锤变桨距机构设计
通过对现有变桨距机构的分析,本文设计一套离心锤变桨距机构,螺旋桨通过布置在桨叶上的离心锤来实现变距。该离心锤变桨距机构的总体方案示意图如图2所示。

图2 离心锤变桨距机构
基于离心力的离心锤变桨距机构可根据自身转速大小自动调节桨距角,该机构的组成图如图3所示,中央立柱和挡板均固定于底座上,弹簧压板可沿立柱发生轴向相对移动,调节螺杆与桨叶根部采用螺栓连接,调节螺杆通过带孔的交接头与弹簧压板通孔连接。
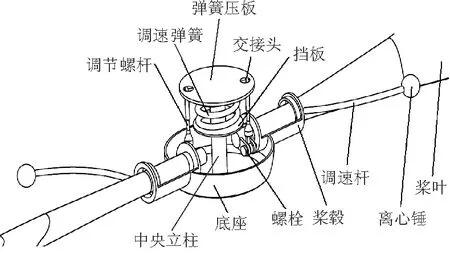
图3 离心锤变桨距机构组成图
2.2离心锤变桨距工作原理
当螺旋桨转速增大时,离心锤的受力分析如图4所示。
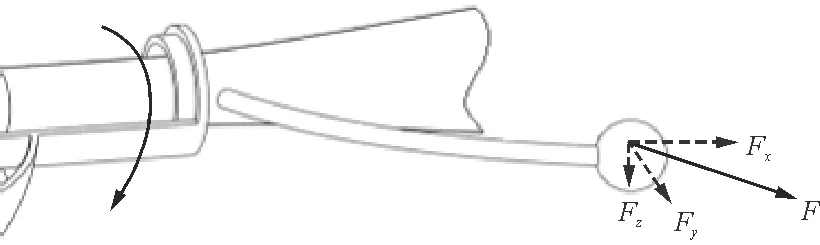
图4 螺旋桨转速增加时离心锤的受力分析
由于调速杆上的离心锤重心偏离桨叶旋转轴心,在离心锤离心力分力Fz的作用下,桨叶克服调速弹簧产生的弹性阻力,沿图中所示方向转动,螺旋桨的桨距变大,当调速弹簧压缩到最短长度时,螺旋桨处于螺距最大的状态;反之,螺旋桨旋转速度减小时,调速弹簧的回复力迫使桨叶回到合适的螺距运行,实现机构在较高效率下的稳定转动。
将离心锤变桨距机构应用于高空飞艇领域,当飞艇逐渐升至高空时,大气密度降低,为了提供足够的驱动力,螺旋桨转速需增大,当转速超过一定值时,在离心锤作用下,螺旋桨螺距增大,桨叶吸收功率和电机输出功率实现良好匹配,同时也将螺旋桨转速控制在合理范围内,确保推进系统的安全稳定运行。同理,当飞艇降低飞行高度时,螺旋桨转速减小,在离心锤作用下,螺旋桨螺距减小,从而确保其工作在高效率的工况。
2.3离心锤方案设计
在该离心变距机构中,调速弹簧和离心锤联合控制桨叶位置:在桨距角增大的过程中,离心锤的离心力克服调速弹簧的阻力起驱动作用;在桨距角减小的过程中,调速弹簧的回复力克服离心锤的离心力起驱动作用,因此离心锤的离心力和调速弹簧的拉力是时时相互矛盾、相互制约的。
基于上述原因,调速弹簧型号的选取和离心锤的材料、质量以及空间位置都至关重要。初步设置调速弹簧K为1.25 kgf/mm,调速杆轴线与桨叶轴线在调速杆投影面内所成的夹角α=50°。离心锤主要靠离心力的作用实现变距,其密度需足够大,初步选择金属铅。在螺旋桨旋转的过程中,离心锤会产生一定的气动阻力,该阻力与离心锤的外形紧密相关,鉴于本文是为了验证所提方案的有效性,因此现阶段选用球体外形。
3离心锤变桨距机构的仿真分析
3.1仿真模型的建立
利用CATIA软件的三维建模功能,建立离心锤变桨距机构的各个零件模型,再将零件模型按照约束关系装配在一起,建立初步设计的离心锤变桨距机构三维模型,利用数据接口将模型导入ADAMS[12-13]中进行仿真。
在所有装配关系及运动副定义完成后,即可根据机构运动关系,为模型添加约束和驱动,进行变桨距机构的仿真分析。为了在验证机构可行性的基础上简化仿真模型,暂未考虑桨叶的气动力。
3.2仿真结果分析
拟合好离心锤变桨距机构在ADAMS中的相关属性后[14],为了测量该机构随螺旋桨转速增加/减少时桨距的变化情况,对底座上的旋转副添加驱动速度函数:step(time,0,0,20,125.85)+step(time,30,0,50,-125.85),在0~20 s内,螺旋桨转速达到1 200 r/min;20~30 s内,螺旋桨以1 200 r/min的速度匀速转动;30~50 s内,螺旋桨转速减小至0。设置仿真时间为50 s,仿真步数为500,仿真结果如图5~图8所示。

图5 螺旋桨转速示意图

图6 桨叶A桨距角随仿真时间变化图
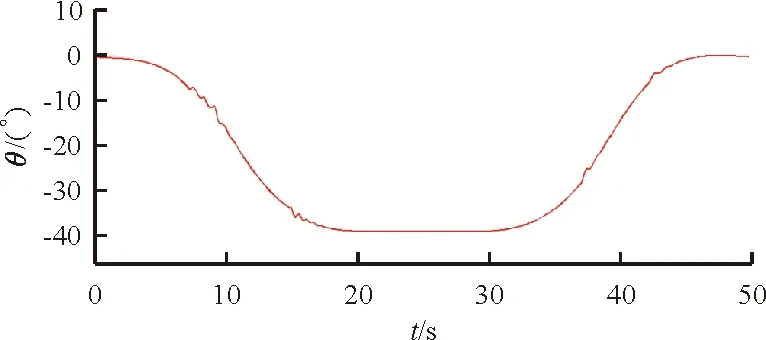
图7 桨叶B桨距角随仿真时间变化图
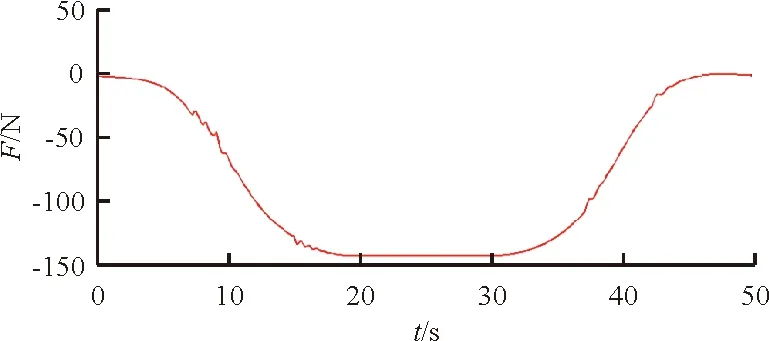
图8 弹簧受力图
从图5~图8可以看出:在0~20 s内,螺旋桨转速增至1 200 r/min,离心锤离心力促使螺旋桨桨距增大了39°;在20~30 s内,螺旋桨匀速转动,桨距角保持不变;而在30~50 s内,螺旋桨转速开始减小,桨叶在弹簧作用下,回复至初始位置。表明当离心锤变桨距机构的转速变化时,螺旋桨的桨距也随之变化,实现了螺旋桨变桨距的功能要求;但在图6~图8中,参数的变化曲线并不光滑,初步判断是桨叶在变距过程中与桨毂发生摩擦引起的,因此后续优化过程中在桨毂内安装了轴承。
4离心锤的优化设计
4.1离心锤优化模型的建立
相同重量和外形的离心锤在离调速杆根部距离相等时,桨距变化的角度范围越大,表明机构的变距效果越好。离心锤变桨距机构的变距效果与调速杆安装角有关,可通过优化离心锤安装角来增强变距效果。优化过程即为在距离调速杆根部一定距离的球面内找到离心锤重心坐标的最优值。
首先,定义设计变量并限定其变化范围,对两个离心锤进行参数化建模;然后,将两个离心锤的参数与所定义的设计变量关联起来,建立离心锤重心坐标参数化模型。
ADAMS/View提供了三种类型的参数化分析方法,其中优化分析需要定义设计目标函数和约束方程。为了使螺旋桨桨距变化范围最大,以桨距变化角g为目标函数,设置其最大绝对值为目标函数值,即max(g)=G(x,y,z),x,y,z为离心锤的重心坐标。在对离心锤空间位置进行优化时,由于调速杆的长度限制,需要对离心锤的重心坐标加以约束,即设置约束函数使离心锤重心坐标离调速杆根部距离一定。调速杆根部点处的坐标值为(211.624,-17.261,2.569),调速杆长度为225 mm,根据上述要求,可得到约束方程为
sqrt[(.dv_1_x1-211.624)2+(.dv_1_y1
+17.261)+(.dv_1_z1-2.569)2]-225≤0
(1)
225-sqrt[(.dv_1_x1-211.624)2+(.dv_1_y1
+17.261)2+(.dv_1_z1-2.569)2]≤0
(2)
式中:设计变量的取值范围分别为320≤.dv_1_x1≤380;-150≤.dv_1_y1≤-90;120≤.dv_1_z1≤180。
4.2优化设计结果与分析
确定目标函数、优化变量和约束条件后,设置仿真步数为500,仿真结果如图9~图11所示。

图9 优化设计后A桨叶桨距角变化曲线图
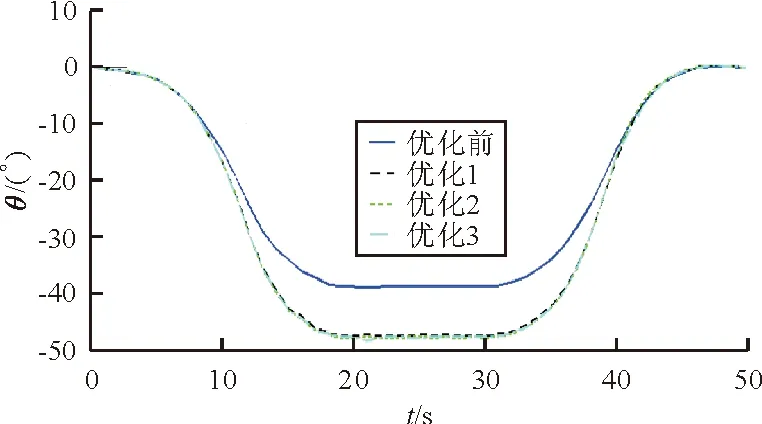
图10 优化设计后B桨叶桨距角变化曲线图

图11 优化设计后的弹簧受力曲线图
从图9~图11可以看出:桨距角变化幅度从优化前的39°到优化后的48°,优化度达到24.1%,优化后的螺旋桨变距范围得到了有效增加。优化结果表明:离心锤安装角的改变对变距效果具有很大影响,本文所进行的离心锤变桨距机构的优化设计是合理有效的,解决了前期仿真过程中出现的参数变化不稳定问题。
5结论
(1) 为了提高高空飞艇螺旋桨效率,设计了一种基于离心力的离心锤变桨距机构,该机构能够平稳可靠地实现变桨距功能,有效解决了现有主动式变桨距机构在重量和能源方面存在的短板问题。
(2) 对所设计的离心锤变桨距机构进行了仿真分析,验证了在转速变化时,机构可以很好地实现螺旋桨变桨距的功能;对离心锤空间位置的优化结果表明,48°的离心锤安装角对于该机构具有最优的变距效果。
(3) 本文设计的离心锤变桨距机构是随动式变距系统,若能在桨毂上添加卡槽,则可将随动式变距转变为多档式变距,使其应用前景更加广阔。离心锤是该机构的关键部件,其外形产生的气动力对机构也有一定影响,何种外形的离心锤的变桨距效果最好,后续将对这一问题开展深入研究。
参考文献
[1] 余刚. 平流层飞艇发展与技术研究[C]∥2008年中国浮空器大会论文集. 长沙:航宇救生装备有限公司, 2008: 53-57.
Yu Gang. The research of development and technologies about stratospheric airship[C]∥The Proceedings of Aerostat Conference of China 2008. Changsha: Aerospace Life-saving Equipment Co., Ltd., 2008: 53-57.(in Chinese)
[2] 谭惠丰, 王超, 王长国. 实现结构轻量化的新型平流层飞艇研究进展[J]. 航空学报, 2010, 32(2): 257-264.
Tan Huifeng, Wang Chao, Wang Changguo. Progress of new type stratospheric airships for realization of lightweight[J]. Acta Aeronautica et Astronautica Sinica, 2010, 32(2): 257-264.(in Chinese)
[3] Rehmet M, Kroplin H, Epperlein F, et al. Recent developments on high altitude platforms[C]∥The 3rd International Airship Convention and Exhibition. Germany: Airship Association, 2000.
[4] 李利良, 郭伟民, 何家芳. 国外近空间飞艇的现状和发展[J]. 兵工自动化, 2008, 27(2): 32-34,48.
Li Liliang, Guo Weimin, He Jiafang. Current situation and development of foreign near space airship[J]. Armament Automation, 2008, 27(2): 32-34,48.(in Chinese)
[5] 王明建, 黄新生. 平流层飞艇平台的发展及关键技术研究[J]. 自动测量与控制, 2007, 26(8): 58-60.
Wang Mingjian, Huang Xinsheng. Development of strato-spheric airship platform and its key technology analysis[J]. Automatic Measurement and Control, 2007, 26(8): 58-60.(in Chinese)
[6] Ilieva G, Páscoa J C, Dumas A, et al. A critical review of propulsion concepts for modern airships[J]. Central European Journal of Engineering, 2012, 2(2): 189-200.
[7] 陈卫华, 童瑶. PA44-180飞机螺旋桨的变距原理及其影响因素分析[J]. 科技视界, 2012(24): 220,354.
Chen Weihua, Tong Yao. The PA44-180 plane of the variable pitch propeller principle and influence factors analysis[J]. Science & Technology Vision, 2012(24): 220,354.(in Chinese)
[8] 张春, 孟兴红. 螺旋桨周期变距系统在螺旋桨飞机姿态控制上的应用研究(上)[J]. 航空科学技术, 2009(3): 37-41.
Zhang Chun, Meng Xinghong. Research on the application of cyclic variable pitch system on propeller-driven aircraft gesture control[J]. Aeronautical Science and Technology, 2009(3): 37-41.(in Chinese)
[9] 田会方, 高指林, 周祖德. 风力机变桨距机构的设计与仿真[J]. 机械与电子,2007(3): 20-22.
Tian Huifang, Gao Zhilin, Zhou Zude. Designing and simulating on the variable propeller pitch mechanism of wind turbine-generator[J]. Machinery & Electronics, 2007(3): 20-22.(in Chinese)
[10] 张成革. 离心变桨风力发电机: 中国, CN201310286219.8[P]. 2013-10-16.
Zhang Chengge. Centrifugal variable pitch wind generator: China, CN201310286219.8[P]. 2013-10-16.(in Chinese)
[11] 徐剑雄. 一种风力发电机的变桨距风轮: 中国, CN101-520023 B[P]. 2011-09-07.
Xu Jianxiong. Variable pitch wind turbine of one wind generator: China, CN101520023 B[P]. 2011-09-07.(in Chinese)
[12] MSC.Software. MSC.ADAMS-View高级培训教程[M]. 刑俊文, 陶永忠, 译. 北京: 清华大学出版社, 2004.
MSC.Software. MSC.ADAMS-View senior training tutorial[M]. Translated by Xing Junwen, Tao Yongzhong. Beijing: Tsinghua University Press, 2004.(in Chinese)
[13] 范成建, 熊光明, 周明飞. 虚拟样机软件MSC.ADAMS应用与提高[M]. 北京: 机械工业出版社,2006. Fan Chengjian, Xiong Guangming, Zhou Mingfei. The virtual prototype software MSC. ADAMS application and improve[M]. Beijing: China Machine Press, 2006.(in Chinese)
[14] 徐芳, 周志刚. 基于ADAMS的凸轮机构设计及运动仿真分析[J]. 机械设计与制造, 2007(9): 78-80.
Xu Fang, Zhou Zhigang. Design and kinematics simulation of cam mechanism based on ADAMS[J]. Machinery Design & Manufacture, 2007(9): 78-80.(in Chinese)
Research on the Design and Optimization of Centrifugal Hammer Pitch-controlled System
Xi Liangliang, Wang Haifeng, Song Bifeng
(School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China)
Abstract:In a high altitude airship propeller system, at present, adopting the technology of variable pitch increases the weight and consumes more energy. A kind of centrifugal hammer pitch-controlled system is designed based on the centrifugal force, the working principle of the mechanism is analyzed, and kinematics and dynamics simulation analysis are carried out by using the ADAMS software. On the basis of the simulation results, parametric modeling of centrifugal hammer is applied, a constraint equation is establish and the pitch angle of optimization as the objective function is made to optimize the space position of the centrifugal hammer. The simulation results show that when the propeller speed changes, this system can accomplish the functions of variable pitch propeller, and verify the feasibility of the mechanism. The optimization results show that 48 degrees of centrifugal hammer installation angle has the best effect of variable pitch for this platforms.
Key words:airship; propeller; variable pitch; centrifugal hammer; simulation; parameter optimization
收稿日期:2016-03-09;修回日期:2016-03-23
通信作者:席亮亮,xllnwpu@163.com
文章编号:1674-8190(2016)02-181-05
中图分类号:V228.9
文献标识码:A
DOI:10.16615/j.cnki.1674-8190.2016.02.007
作者简介:
席亮亮(1990-),男,硕士研究生。主要研究方向:飞行器结构设计。
王海峰(1971-),男,博士,副教授。主要研究方向:飞行器总体设计、飞行器结构设计等。
宋笔锋(1963-),男,博士,教授,博导。主要研究方向:飞行器总体设计、飞行器结构设计、系统/结构/机构可靠性与维修性。
(编辑:马文静)
