缆系海底科学观测网研究进展
2016-06-22周怀阳
吕 枫,周怀阳
(同济大学海洋与地球科学学院,上海 200092)
缆系海底科学观测网研究进展
吕枫,周怀阳
(同济大学海洋与地球科学学院,上海 200092)
摘要:缆系海底科学观测网将成为海洋学研究的一个重要工具。本文综述了缆系观测网中的海底高压直流输配电、海底高压高频直流变换、海底远程电力监控、海底远距离信息传输和海底原位科学实验等五大关键技术及其研究现状,介绍了国内外缆系观测网的研究进展,并展望了未来科学观测网的发展方向。
关键词:缆系海底观测网;高压直流输配电;高压高频直流变换;远程电力监控;远距离信息传输;原位科学实验
周怀阳(1961-),男,博士,教授,研究方向为海洋化学。E-mail: zhouhy@tongji.edu.cn
引言
海洋对全球环境和气候变化影响巨大,理解深海大洋的运行机理是人类文明发展的关键。理解的基础是观测,要从现象描述发展到机理探索和环境预测,就需要有目的地针对复杂的海洋过程开展长期观测,才能更好地理解已运行数十亿年的深海大洋[1-3]。传统的海洋观测方式主要是船基考察,但受制于船时和天气等因素,船基考察只能是断断续续或者零零散散的。卫星遥测遥感对地观测系统实现了对地面和海面观测的长期性与连续性,但无法穿透巨厚的海水直接观测深海海底。通过船只布放的自容式或锚系式的着底器只能支持少量海底设备的短期供电,无法实时传输数据,还需要较为频繁的定期维护[4]。各类水下运载器是深海环境探测的有力工具,能够揭示深海大洋的多样性和复杂性,但由于仍然是依靠自带的电池供电,无法长期蹲守深海[5, 6]。
针对长期、原位、实时和高分辨率观测的科学需求,缆系海底科学观测网(以下简称“观测网”)将成为海洋学研究的一个重要工具。观测网是能够长期持续提供电力和通信服务的海底科学基础设施,通过光电复合通信海缆将电力系统和通信系统直接从陆地延伸到海底,从而解决大量原位观测设备在海底长期运行面临的持续电能供给和海量数据传输两大难题,可实现从海底直接对深海大洋特定区域的物理、化学、生物和地质等过程进行高分辨率的原位实时观测。观测网既能向下观测海底以下的海洋,又可通过锚系向上观测大洋水层,还可通过水下接驳坞连接各种活动观测平台,从而摆脱了传统海洋研究方式的种种局限,使科学家可在岸上实验室里实时监测深海实验,远程监测海底风暴潮、火山喷发、地震、海啸、滑坡和赤潮等各种突发事件,从根本上改变人类认识海洋的途径[1, 7, 8]。
针对观测网的实质性研究和应用主要始于本世纪初,近年来受到各主要发达国家的日益重视,目前国外有一些规模大小不等的观测网已在运行或建设中。我国的观测网研究比美国、加拿大、日本和欧洲的起步略晚。国内涉海单位已开展多年的关键技术积累和组网装备研制,合作建设的东海和南海小规模试验网已部分试运行或开展海试,“国家海底长期科学观测系统”大科学工程也即将启动建设。
1 观测网的关键技术
当前国内外观测网的总体物理结构基本如图1所示,由各类原位观测传感器/仪器/机器人、观测仪器适配器(Science Instrument Interface Module,SIIM,也即次接驳盒)、海底主基站(即主接驳盒)、光电复合通信海缆(安装有海底中继器和海底分支器)、海岸基站和远程控制中心等部分组成,其主干基础设施按功能可分为电力系统和通信系统两大部分,具有供电、通信、监控和授时四大功能。其中,SIIM与各类传感器和仪器可组成观测仪器平台,通常针对特定的科学目标,代表一个较为集中的海底观测节点。

图1 观测网的总体物理结构图片来源: 文献[9]。
观测网的运行周期通常要求在25年以上,且主干网核心部件基本要求免更换和免维护。而观测网主要位于海底,特别是深海海底,特殊的地理位置加上天气、海况和船时的限制,导致其研制、布放和维修的难度大、周期长、成本高。组网设备的可靠性要求越高,则研制和试验的成本越高,而预算通常是较为有限的,因此必须从可靠性和经济性两方面折中考虑。可见,大规模观测网的规划和建设是个复杂的系统工程,而其总体设计原则是,在满足科学需求的前提下,确保足够的可靠性、灵活性和扩展性,并尽量降低其运行周期内全寿命成本,即建设和维护维修的总成本。由于观测网在海底特殊环境下运行,存在较高的技术风险和工程风险,而解决观测网的关键技术是降低各类风险的前提条件。
1.1海底负高压直流输配电技术
观测网的核心电力装备主要有海底主基站高压直流变换器、海缆、电切换型分支器和岸基高压直流馈电设备(Power Feeding Equipment,PFE),采用在跨洋通信系统中广泛应用的标准单极光电复合通信海缆,因此其适合采用的电力系统总体方案为:负高压单极直流输电,以海水作为电流回路;PFE为电压源,与海底负荷并联供电[10]。从系统角度上看,海底电力系统的稳定性对于观测网的可靠运行至关重要,并直接影响其科学功能的实现,必须在设计和运行的整个过程中引起足够的重视。因此,为尽量降低观测网出现稳定性问题的风险,在设计阶段必须对核心电力装备进行合理的建模,分析观测网电力系统的静态和暂态稳定性,以及各种系统参数对海底电力系统稳定性的影响,并在运行阶段实时监控其关键环节的状态。
相对于较为成熟的陆地电力系统,观测网电力系统具有独特的系统架构、较低的可观测性和可达性,采用输电电压为负高压的直流分布式电力系统(Direct Current Distributed Power System,DC DPS),并由海底主基站和SIIM将高压直流电逐级降压变换为科学仪器运行所需的低压直流电。DC DPS的主要特点是系统相对独立、直流变换器密集和负载对电网影响较大[11, 12]。目前DC DPS主要应用于小规模的中低压系统,早期应用以国际空间站为代表[13]。高级运载工具采用电力驱动可提高系统性能和可靠性,并提高燃油使用率和减少废气排放,因此近年来各类多电或全电运载工具受到越来越多的关注[14, 15],如空天领域的空间站和多电飞机[13, 16]、海洋领域的全电航母舰船和水下运载器[17]、地面领域的电力机车和电动汽车[18, 19]等。此外,还有针对工业系统和商业设备采用DC DPS的初步研究[20, 21]。上述DC DPS的主要特点是电压相对较低,电网结构相对简单,但其思路和方法对于观测网DC DPS的设计和分析具有借鉴意义。
根据科学需求,观测网的海缆总长可达数千公里(通信海缆的线阻相对较大),海底主基站可达数十个以上,仪器平台可达数百个,输电电压可高达数千伏,电网拓扑可为复杂的网形结线,因此观测网电力系统应为当前世界上实际应用中最高电压和最大规模的一类DC DPS[22]。根据可靠性和经济性的原则,文献[23]初步分析了观测网最大传输功率的限制因素,提出合理设计海底变换器的输入滤波器可提高电力系统运行稳定性。文献[24]初步分析了观测网电力系统稳定性的影响因素,提出在海底变换器的输入侧并联调节器可提高系统运行稳定性。文献[25]和[26]介绍了NEPTUNE观测网电力系统的初步设计思路和继电保护方案。文献[27]在组网设备的研制过程中分析了东海观测试验网的静态和暂态稳定性。总体上,针对规模较大和电网结构较为复杂的海底负高压DC DPS,尚需深入研究其直流输配电中的电网结构可靠性和电力运行稳定性,尽量降低组网设备大规模互联运行时的系统失效风险。
1.2海底高压高频直流变换技术
海岸基站PFE将陆地电网提供的工频交流电变换为负高压直流电,通过主干海缆、电切换型分支器和分支海缆给各个海底主基站内的高压直流变换器供电,并由高压直流变换器将数千伏以上的高压直流电降压变换为SIIM所需的数百伏的中压直流电,再由SIIM将中压直流电降压变换为各类观测设备所需的48V以内的低压直流电,因此观测网采用的是级联式直流变换方案。
海底主基站内的高压高频直流变换器是研制难度较大和技术风险较高的核心电力装备之一,其功能类似于陆地电网中主变电站的角色。由于海底设备须具有紧凑的体积和极高的可靠性,该变换器适合采用电能变换效率较高的高频开关直流变换技术,以提高功率密度和降低发热损耗,且有利于延长工作寿命。在远距离输电时,海缆实际电压随着海底负荷大小变化而变化,因此要求该变换器具有较宽的输入电压范围,通常其最低输入电压约为观测网最高运行电压的一半[23]。由于各个海底高压变换器的输入侧并联,为了降低故障传播的概率,其输入侧和输出侧应采用变压器隔离,以提高整个观测网的运行可靠性。可见,该变换器的基本特点是:输入电压高且输入电压范围宽;输出电压较高且输出功率大;输入侧和输出侧隔离;高功率密度和高可靠性。
对于高频直流变换器而言,观测网提供的输入电压等级已很高,当前国际上该类高压高频直流变换器只在观测网上有初步应用,而在陆地实际工程中极为罕见。国外主要由美国宇航局下属的喷气推进实验室作了前期研究,采用双管正激变换器作为基本模块(Power Electronics Building Block,PEBB),通过多模块组合式结构实现高压直流变换[28]。近年来,浙江大学和同济大学等单位也对此作了相关研究。浙江大学将多个采用双管正激拓扑的PEBB通过输入串联输出并联(Input-Series Output-Parallel,ISOP),实现高压直流变换[29]。同济大学则研究了单模块直流变换和组合式直流变换两类方案并分别研制了样机:前者选择高压IGBT作为功率器件,采用移相控制全桥拓扑实现高压直流变换;后者选择低压MOSFET作为功率器件,将多个采用同移相角控制的全桥拓扑PEBB通过输入串联输出串联(Input-Series Output-Series,ISOS),实现高压直流变换。总体上,前者结构相对简单,主要优点是可靠性高和功率大,主要难点是高效紧凑的高压高频电路和可靠的高压启动与辅助电路,通常采用整机冗余备份方案;后者结构相对复杂,主要优点是变换效率和功率密度略高,主要难点是输入输出动态均压均流控制和故障模块在线快速隔离,通常采用模块冗余备份方案。这两种主要的海底高压高频直流变换器方案如图2所示。
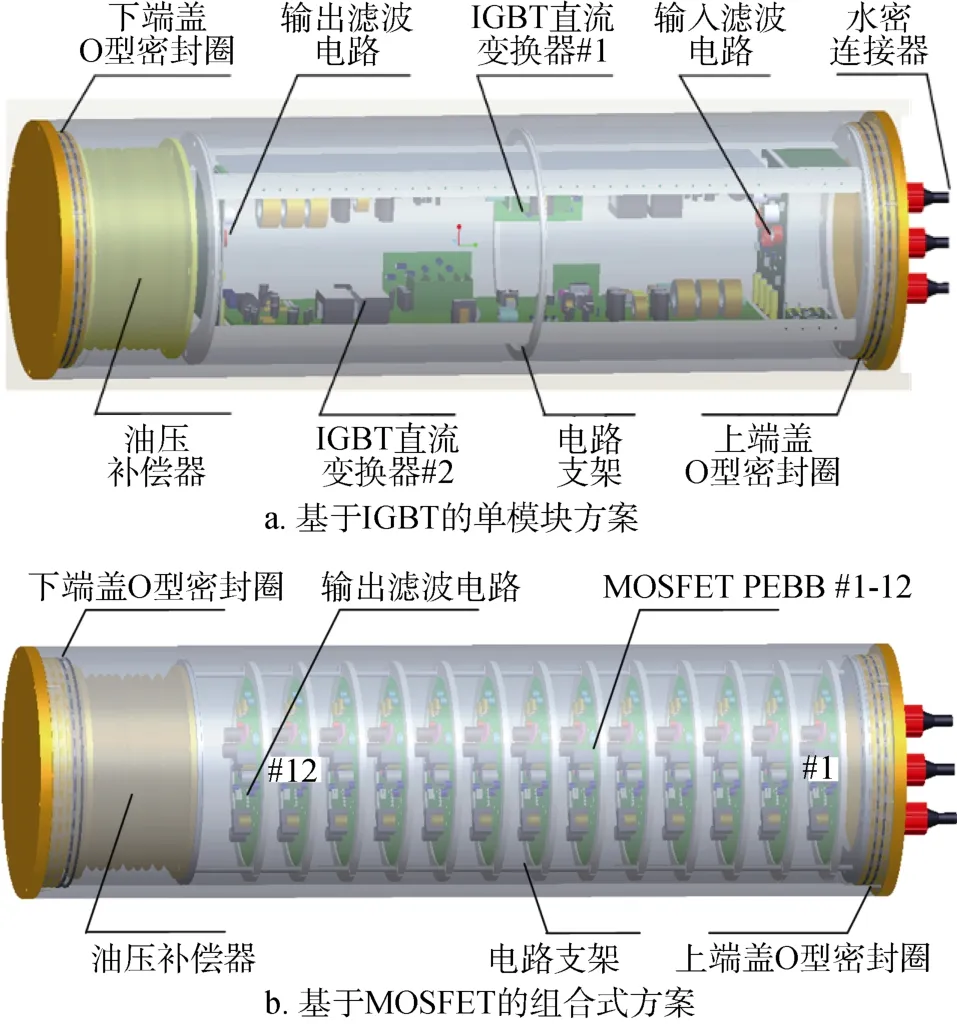
图2 两种主要的海底高压高频直流变换器设计
1.3海底远程电力监控技术
观测网电力系统的基本要求是保证持续可靠地供电,但由内因或外因导致的意外供电中断不可避免。内因主要是核心电力装备的质量问题,外因主要有渔业拖网、船舶抛锚、鱼类撕咬和地质灾害等,此外还有人为因素。为了确保观测网的运行可靠性,除了必须在设计阶段开展仔细的理论分析、计算机仿真和模型模拟外,还需要在运行阶段实时监控并在线分析其关键节点的工作状态,针对观测网的特点设计海底远程电力监控系统(Power Monitoring And Control System,PMACS),采用合适的控制策略完成陆地电网中能量管理系统(Energy Management System,EMS)和监控与数据采集系统(Supervisory Control And Data Acquisition,SCADA)的相关功能[30],而通过EMS/SCADA提高电力系统运行可靠性的关键是引入合适的电网分析算法[31]。除了陆地电网,针对实际应用而开发的EMS/SCADA还被应用于服务器集群、建筑物内部环境、混合动力汽车、燃料电池系统和微电网等领域,以提高电能利用率和运行可靠性。
由于体积受限,标准海缆、海底中继器和海底分支器内通常无法安装遥测和遥信单元,只有海岸基站和海底主基站具有电压和电流测量功能,因此无法直接测量主干网关键节点(如分支器)处的潮流状态和开关状态。相对陆地电力系统,海底电力系统具有较低的可观测性,特殊地理位置又使其具有较低的可达性,必须在这种低可观测性和可达性的情况下确保海底电力系统的可靠运行。此外,观测网中的海底通信系统不但传输科学数据,还承担电力通信功能,也可能间接导致海底电力系统的崩溃。目前世界上观测网的节点数还较少,结构也较为简单[32-35],由于科学观测网具有良好的扩展性,这些观测网的节点数将会逐渐增加,其电力系统的复杂度也会随之提高,如原NEPTUNE观测网设计中具有46个海底主基站组成网型拓扑[36]。因此,PMACS需要能够适用于复杂结构的观测网。目前国内外的相关研究还较少,国外主要由美国华盛顿大学等单位研究了观测网的监控算法[26, 30, 37-40],国内主要是浙江大学和同济大学等单位研究了组网设备的电能监控软硬件[41, 42]。
观测网PMACS的核心功能是海底电力系统的远程监测、分析与控制,主要包括数据采集、负载管理和电网分析三个子系统,每个子系统由若干功能模块组成。PMACS以数据采集、报警处理、命令发送和人机界面等基本模块为基础,实现负载管理、状态估计和故障处理等高级功能,以准确掌握系统实际运行状态,预测系统运行趋势,提供系统运行对策,保障观测网电力系统运行和控制的稳定性和可靠性[43]。此外,观测网需要采用电切换型分支器实现海缆分段继电保护,这是从系统层面提高观测网整体可靠性和可用性的重要方案。海岸基站的通信监控设备通过光脉冲编码来切换分支器内多个继电器的状态,闭合相应的继电器可连接主干海缆和分支海缆,断开相应的继电器则可隔离发生故障的海缆或海底主基站。可见,分支器的运行不能依赖海底主基站的供电,其内部电路需要直接从主干海缆取电,且其继电器状态只受岸基光信号指令的控制。在维修情况下,须控制继电器将故障海缆段连接到分支器的海地端,以确保维修船上的人员安全。
1.4海底远距离信息传输技术
目前远距离大容量的数据传输基本采用光纤作为数字信号传输媒介,观测网采用的海缆光纤通信系统可分为有中继和无中继两类。由于光信号在光纤中具有传输损耗,超过400km的远距离数据传输通常需要采用有中继的海缆通信系统。在有中继系统中,两套海岸基站PFE分别在海缆两端通过海缆内的铜导体给光中继器以恒流模式供电,每隔100km左右重建光纤数字信号的幅度和波形。小规模观测网可采用无中继系统,而中大规模观测网由于需要覆盖较大范围的海底区域,须采用有中继系统。
由于海底光中继器的体积和可靠性限制,有中继系统中通常只容纳1—6对光纤,每对光纤均可承载上波和下波。目前海缆通信系统一般采用密集波分复用(Dense Wavelength-Division Multiplexing,DWDM)技术,使得单个商业海缆通信系统的通信容量可高达数十Tb/s,其采用的光分插复用(Optical Add-Drop Multiplexer,OADM)分支器可使所有海底主基站能共享同一光纤对的容量,从而克服了光纤对数对海底主基站个数的限制。由于体积限制,目前单个海底主基站的最大通信带宽通常为2-10Gb/s。海底光中继器中应用比较成熟的是掺饵光纤放大器(Erbium-Doped Fiber Amplifier,EDFA),其正常工作需要泵浦激光器、波分复用器和掺饵光纤。泵浦激光器给增益介质提供激励能源,在EDFA中常用980nm和1480nm波段。波分复用器为三端口器件,把泵浦激光和信号光耦合到同一根光纤中传输。掺饵光纤是EDFA的增益介质,吸收泵浦激光后饵离子会跃迁到激发态,当信号光光子经过时发生受激辐射,产生与信号光光子同频率、同方向和同偏振的光子,实现光信号的放大。
目前商用海缆通信系统的各个海缆终端均在陆地上,海底中继器和海底分支器均采用两端恒流供电模式从海缆中直接串联取电,单个海底中继器或海底分支器的供电电压通常仅为数十伏,供电电流通常约为0.65A。而科学观测网采用恒压模式供电,海底负荷多且功耗大,如单个海底主基站的最大功率可达近10kW,即超过一个中美跨洋通信海缆系统的负荷总功率,且海缆的输电电压高、电流变化范围宽,可从0.1A直至10A。因此,必须改进传统恒流模式供电的海底中继器和海底分支器内部的电路和结构,使两者能满足观测网宽电流范围运行的需求,导致两者内部电路的电气应力大大提高,这是目前观测网远距离信息传输技术中的难点之一。此外,海底中继器和海底分支器在恒压模式下的启动机制和电切换方式与传统恒流模式不同。在两端供电的恒流模式下,全网海底中继器和海底分支器均同时启动和关闭;而在恒压模式下,所有海底分支器处于初始断开状态,需要在供电电压逐级传递下实现工作状态切换。
1.5海底原位科学实验技术
观测仪器是观测海洋现象和测量海洋要素的基本工具,而海底长期原位观测是未来海洋科技领域的发展方向。在观测网出现之前,传统海洋仪器通常为低功耗和自容式设计,功能极为有限,但在离线式海洋探测中发挥了重要作用。随着观测网的发展,近几年针对复杂科学仪器的研究逐渐起步,总体趋势是将实验室直接布设在海底,建立满足特定科学需求的海底原位实验室。原位实验室的特点是科学功能强大,智能化程度高,可灵活地远程操作和配置,将大大促进对海洋复杂运行机理的探索。原位实验室通常对供电功率和通信带宽有较高的要求,可充分发挥观测网持续充裕供电和高速数据传输的优势[44]。
管理美国蒙特雷湾加速研究系统(Monterey Accelerated Research System,MARS)试验网的美国蒙特雷湾海洋研究所在复杂科学仪器的研究上具有代表性:蒙特雷海底宽带地震观测站(Monterey Ocean-floor Broadband Seismic Station,MOBB)[45]是深海地震探测的先驱;水下低感光摄像机(Eye In The Sea,EITS)采用远红外光源观测深海发光生物,开辟了观测深海动物的新途径;海洋酸化试验系统(Free Ocean Carbon Dioxide Enrichment System,FOCE)[46]通过控制CO2浓度调节海底培养器中的pH值,原位观测海洋生物在水体酸化下的变化;深海激光拉曼光谱仪(Deep-Ocean Raman In Situ Spectrometer,DORISS)[47]可同时测量多种海水元素,并首次在海底实现了水合物的原位测量;环境样品处理器(Environmental Sample Processor,ESP)[48]将分子生物学技术应用于海水的原位实时监测,通过采集非连续水样并富集微生物后,自动应用分子探针技术,通过三明治杂交分析直接检测rRNA,鉴别是属于细菌、古菌、藻类还是无脊椎动物,能够用于海洋生物灾害预警。近年来,国内科研单位也研制了一些原位科学仪器,但总体上比国外起步晚,尚待重大创新的出现。
深海探测和太空探测具有相似性,都是离人类生活的环境过于遥远和不同,因此不少任务适合利用水下机器人去执行[5]。水下机器人主要有自主水下航行器(Autonomous Underwater Vehicle,AUV)、水下滑翔机(Glider)、远程遥控运载器(Remote Operated Vehicle,ROV)和海底爬行车(Seafloor Rover)等。观测网还将推动各类水下机器人的发展,水下机器人可通过连接至观测网上的接驳坞(Docking Station)实现水下充电、上传数据和下载指令[49],可构成活动式的海底实验室,从而将固定式观测网持续充裕电能和高速数据传输的优势和活动观测平台的机动性和灵活性结合起来[50, 51]。
2 国外观测网进展
观测网的前身是海底观测站,均建设于二十世纪末,主要有美国的长期生态观测站(Long-term Ecosystem Observatory at 15 meters,LEO-15)[52]、夏威夷水下地学观测站(Hawaii Undersea Geo-Observatory,HUGO)[53]、夏威夷2号观测站(Hawaii-2 Observatory,H2O)[54]、马萨葡萄园岛海岸观测站(Martha’s Vineyard Coastal Observatory,MVCO)[55]等。相对缆系观测网,观测站的特点是结构较简单,为封闭式设计,供电能力和通信带宽极为有限,因此只能支持少量低功耗传感器,使得其功能较为单一,灵活性和扩展性较差。
随着技术的不断发展,海底观测站逐渐发展为小规模观测网,比较典型的有美国MARS[56]、加拿大维多利亚海底试验网(Victoria Experimental Network Under the Sea,VENUS)[57]和美国ALOHA观测网[58]。除了自身的科学目标以外,这些小规模观测网也是大规模观测网组网设备的试验场所。由美国蒙特雷湾海洋研究所负责管理的MARS观测网如图3所示,其主缆长约52公里,具有一个带8个湿插拔接口的海底主基站,布放点水深约为891米,采用-8kVDC左右电压源供电,最大输出功率为9kW,数据通信总带宽为1Gb/s,每个接口可提供375V或48V直流电和100Mb/s通信带宽,于2009年开始运行[56]。加拿大维多利亚大学负责管理的VENUS有两条独立的海缆:一条海缆长约3km,采用-400VDC左右电压源供电,通信总带宽为1Gb/s,只有一个水深95m处的海底主基站,于2006年开始运行;另一条海缆长约40km,采用-1.2kVDC左右电压源供电,通信总带宽为1Gb/s,拥有分别在水深175m 和300m处的两个海底主基站,于2008年开始运行。美国夏威夷大学负责管理的ALOHA观测网位于Oahu岛北部100km处,水深4800m,于2011年开始运行。由于ALOHA观测网采用的退役海缆内含有需要恒流供电的光中继器,因此其采用该中继器允许的、较其正常工作电流稍高的1.6A恒流源供电,可提供约1200W总电能和100Mb/s通信带宽[58]。

图3 典型的小规模观测网(www.mbari.org/mars)
目前世界上已初步建成的较大规模观测网主要有三个:加拿大西北太平洋时间序列观测网(North-East Pacific Time-Series Underwater Networked Experiment,NEPTUNE)[59]、美国海洋观测计划(Ocean Observatory Initiative,OOI)的区域网部分[60]和日本地震海啸密集海底网络系统(Dense Oceanfloor Network System for Earthquakes and Tsunamis,DONET)[61]。此外,日本海沟海底地震海啸观测网(Seafloor observation network for earthquakes and tsunamis along the Japan Trench,S-net)即将建成[62],欧洲多学科海底观测网(European Multidisciplinary Seafloor Observatory,EMSO)也正在建设中[63]。其中,美国OOI区域网早期和NEPTUNE Canada统称为NEPTUNE观测网,原计划用数千公里的光电复合通信海缆,覆盖北美太平洋岸外的整个胡安·德·夫卡(Fuan de Fuca)板块,将数千个海底观测设备联网,对水层、海底和地壳进行长期实时观测[36]。
加拿大NEPTUNE观测网位于Juan de Fuca板块北部,其示意图见图4,于2009年正式启用,其具体科学命题有板块动力学、气候变化、海洋生产力、海洋资源、突发事件和自然灾害等。NEPTUNE观测网的海缆长度约为920km(主干缆约800km、分支缆约120km),观测范围从水下17m至2660m,将科学数据实时传回陆地后存储到数据库中,并向公网发布,其数据系统和监控系统均在Web 2.0环境下开发。为提高供电和通信的可靠性,NEPTUNE观测网设计为环型拓扑,采用最高-10kVDC电压源供电,通信总带宽为10Gb/s。NEPTUNE观测网现有5个海底主基站,可至少再扩展5个海底主基站(包括Middle Valley),每个海底主基站可提供的最大功率约为9kW,并拥有6个仪器平台接口[64]。

图4 加拿大NEPTUNE观测网示意图(www.oceannetworks.ca)
美国OOI观测网位于Juan de Fuca板块中南部,其示意图见图5(a),可分为区域网(Regional Scale Nodes,RSN)、近岸网(Coastal Scale Nodes,CSN)和全球网(Global Scale Nodes,GSN)三大部分,用于长期高分辨率地观测关键海洋参数,其主要科学主题是海气交换、气候变化、大洋循环、生态系统、湍流混合、水岩反应、洋中脊的各种过程、地球内部构造和地球动力学等[8]。其中,CSN和GSN主要采用锚系和水下机器人等观测工具,而RSN为缆系观测网,是OOI中技术难度最大的部分。由于经费暂时缩减,RSN的结线方式从网型、环形直至当前的链形,海底节点数随之减少,拓扑结构随之简化,待未来不断扩展。现阶段RSN总长约为900km,将采用最高-10kVDC电压源供电,通信总带宽为10Gb/s至40Gb/s,共在3000m水深范围内布设7个海底主基站,每个海底主基站可提供的最大功率为8kW,其示意图如图5(b)所示。RSN的主干海缆分成两条:一条经过中板块通到主轴火山节点;另一条通过水合物区连接俄勒冈长久阵列。
2003年,日本海洋科技界提出建造大规模的先进实时海底区域监测网(Advanced Real-time Earth monitoring Network in the Area,ARENA),计划采用网型拓扑覆盖整个日本周围海域,海缆长达3600km,每50km布放1个海底主基站,共有4个海岸基站和66个海底主基站,具有良好的容错能力、可扩展性和可维护性[65]。ARENA观测网甚至计划未来延伸至阿留申群岛并连接至NEPTUNE观测网,从中国东海延伸至菲律宾海,后因财政问题被搁置。由于日本处在板块之交和俯冲带上的大地震多发区,针对其地理特点凝聚观测目标后,后又提出在日本以南海域分期建造DONET观测网,主要用于地震、海啸等自然灾害的监测和预警。DONET观测网于2011年完成第一期DONET1,具有1个海岸基站、5个海底主基站和20个观测节点。目前第二期DONET2也已基本完成,具有2个海岸基站、7个海底主基站和29个观测节点,并在DONET1上增加了两个观测节点,如图6(a)所示[66]。由于海底负荷较为单一,DONET观测网采用恒流供电,最高供电电压约为3kV,其观测节点之间相距只有15—20km,地震仪、压力计等多种仪器分布较为密集,能够精确监测不同程度的地震、海啸和板块形变等[66]。此外,2011年东京大地震后,日本立项建设的S-net观测网也即将全部建成并投入使用,其具有6个海岸基站,共150个相距30—50km的地震海啸观测节点,海缆总长达5700km,规模超过原ARENA观测网,采用DONET类似的组网技术,如图6(b)所示[62]。S-net为目前全球规模最大的海底地震海啸观测网,其规模是现有NEPTUNE Canada和OOI RSN等综合性科学观测网的数倍,但仪器种类单一、个数相对较少,且几乎完全为封闭式设计,因此其实际海底总负荷反而要比NEPTUNE Canada和OOI RSN小至少一个数量级。
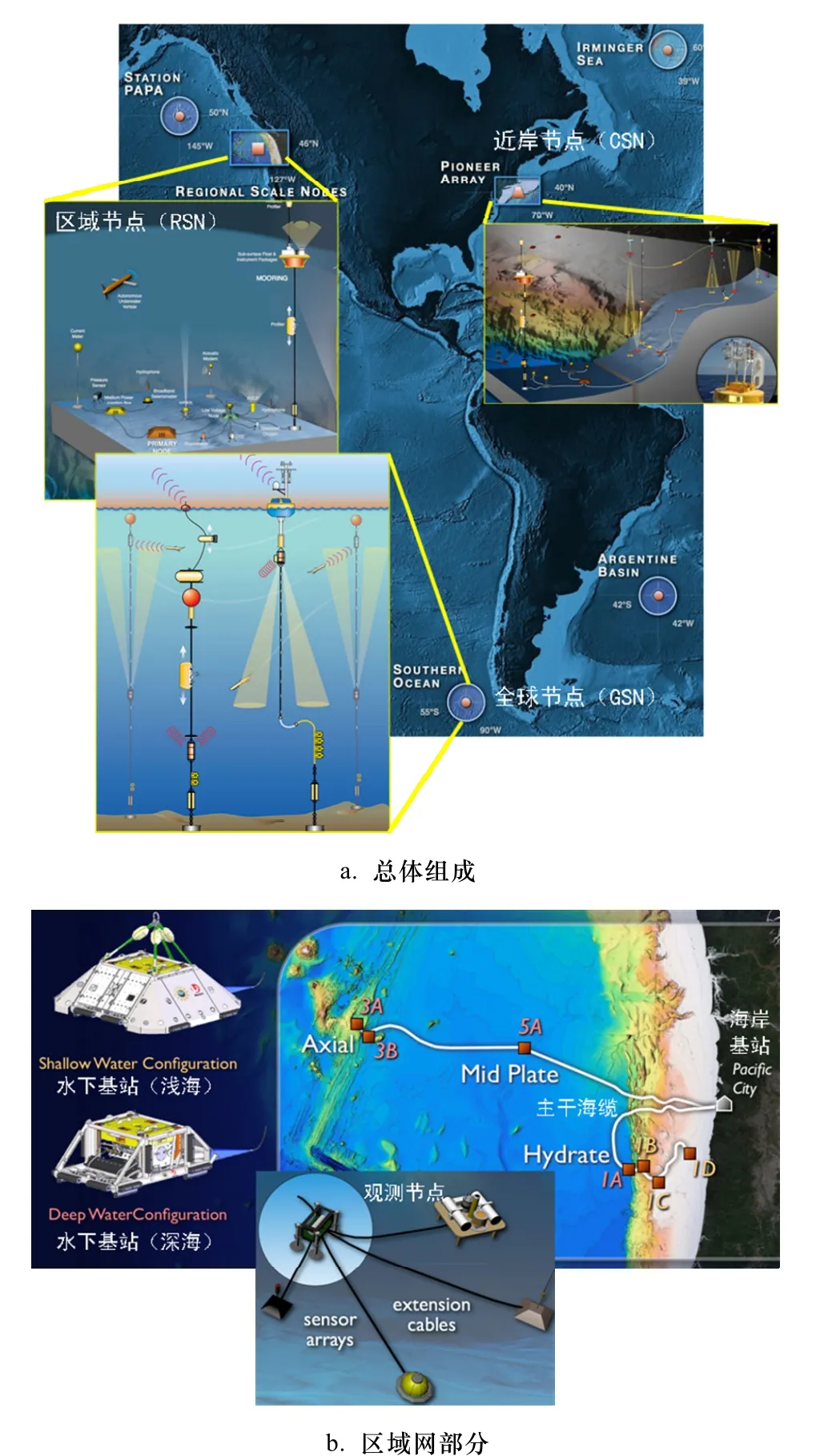
图5 美国OOI观测网示意图(www.oceanleadership.org)

图6 日本防灾观测网图片来源: 文献[62]。
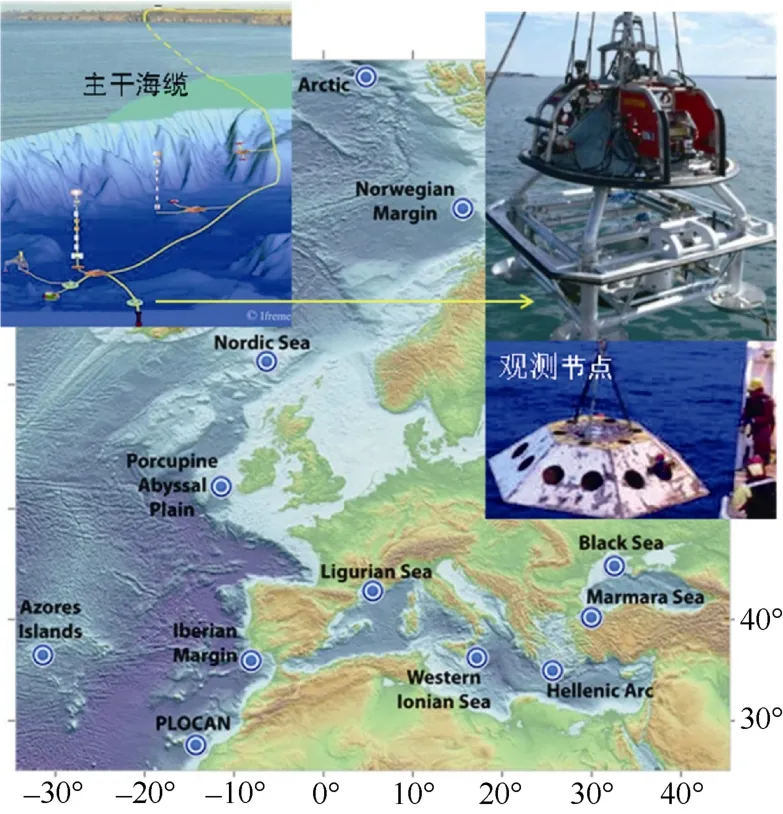
图7 欧洲EMSO观测网示意图(www.emso-eu.org)
欧洲的观测网最初源自高能物理研究,称为“中微子望远镜”,用于探测和追踪来自宇宙的中微子。近十年来,主要由意大利地球物理与火山学研究所围绕其自治式观测站GEOSTAR系列推动欧洲观测网的发展[7]。基于GEOSTAR技术的NEMO-SN1是欧洲第一个准缆系观测网,其通过长约25km的海缆与中微子观测系统NEMO联网,而并未连接至陆地[67]。本世纪初欧洲提出的EMSO观测网计划包含十多个观测子网,将覆盖北冰洋、大西洋、地中海和黑海等,其科学目标是监测岩石圈、生物圈、水圈以及自然灾害等[63]。EMSO观测网的最大水深超过5000m,初步估计海缆总长达5000km以上,其示意图见图7。因各种原因,EMSO观测网的进展相对缓慢。
观测网按总体结构可分为开放式和封闭式两类。开放式观测网可根据科学需求不断升级,在ROV协助下灵活更换或扩展各种科学仪器,甚至连接浮标、潜标以及AUV、Glider等移动观测平台,从而有针对性地开展各类海底原位实验,科学用户多、科学应用广;而封闭式观测网的科学仪器较为单一,不具有扩展性或具有极为有限的扩展性,功能升级难、应用面较窄。用于多学科综合海洋观测的科学网为开放式观测网,如美国OOI RSN观测网、加拿大NEPTUNE观测网和欧洲EMSO观测网等;用于国防的军事网和用于防灾减灾的专用网则为封闭式观测网,如日本的DONET观测网和S-net观测网,其中DONET观测网具有一定的扩展性。总体上,开放式观测网较封闭式观测网,实现难度更大、技术风险和工程风险更高。
3 国内观测网进展
从2005年起,我国开始关注国外观测网的进展[68]。2008年和2011年,两届海底观测网国际研讨会在同济大学召开,交流国际建设观测网的经验,探讨我国建设观测网的方向。2012年,第一届海底观测科学大会在同济大学召开,交流国内外海底观测的科研成果和经验,研讨我国观测网的关键科学问题和实施战略,探索适于我国海域特色和实际需求的建设之路。十一五期间,在国家“863”计划重点课题的资助下,同济大学联合浙江大学、上海交通大学和中国海洋大学等单位开展了缆系海底科学观测网关键技术的研究和组网设备的研制,研制的国内首个海底观测节点在美国MARS观测网上成功进行了为期6个月的深海并网试验[69]。2009年4月,同济大学建成了我国第一套海底观测试验系统——东海海底观测小衢山实验站,位于洋山国际深水港东南约20公里的小衢山岛附近,在2010年记录到智利大地震引发海啸对东海近岸的影响[70]。同期,中科院在南海布设了数十公里长的海底光纤观测阵列。十二五期间,在国家“863”计划重大课题的资助下,国内多家涉海单位联合建设小规模的东海和南海观测网试验系统,上海市科委同期投资建设“东海海底观测应用系统”一期工程,目前已部分试运行或开展海试,为我国全面建设观测网进一步积累宝贵经验。在近十年的研究基础上,作为我国的重大科学基础设施,“国家海底长期科学观测系统”大科学工程也已立项,预计其海缆总长达1500km以上,其目标是建设大规模的东海和南海科学观测网,实现对东海陆架区和南海海底及水柱环境的长期、实时和高分辨率的立体观测,获取中国两大边缘海的海洋学过程的主要特征,并服务于海洋工程实验、海洋环境保护、海洋渔业保护、海洋灾害预测、海洋科普教育以及国防安全等多方面的综合需求。
观测网的海底核心组网装备主要有海底主基站、观测仪器平台和安装有中继器/分支器的海缆等。同济大学研制的一种海底主基站和一种观测仪器平台分别如图8和图9所示。其中,海底主基站主要包含海底高压直流变换器和海底控制与通信系统两大功能单元,以及包括海缆终端光电分离器、外部负载湿插拔连接器、接海阴极和防拖网结构等功能模块;观测仪器平台主要由SIIM和若干科学传感器/仪器组成,按实际科学需求设计的具体形态多种多样,满足接口规范要求的SIIM之间还可级联来进一步扩展观测范围。海底主基站与仪器平台之间以及SIIM与某些独立布放的观测仪器之间,通常采用可通过ROV在海底直接操作的湿插拔连接器进行连接,实现相互间供电和通信的接驳,如图10所示。
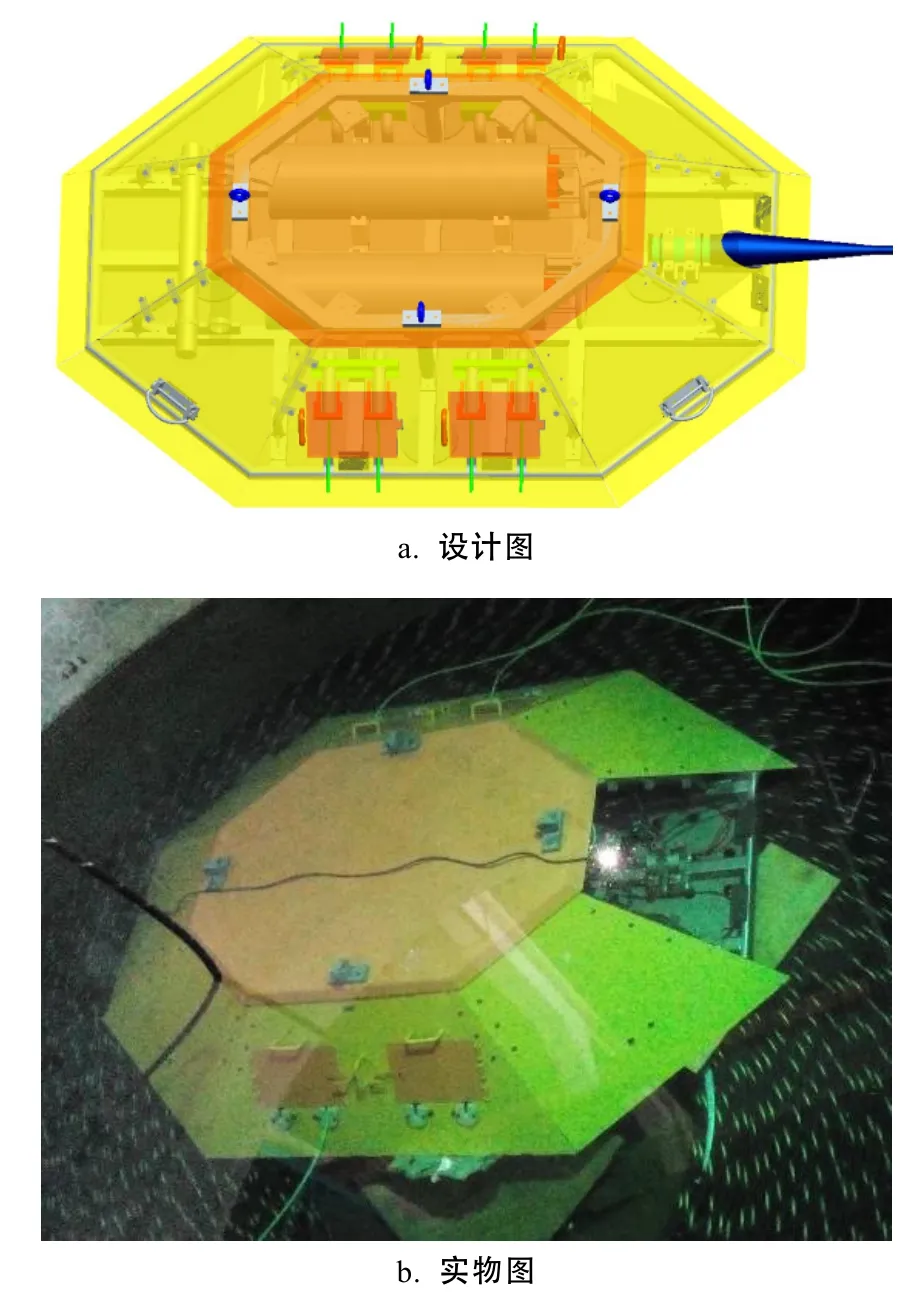
图8 同济大学研制的一种海底主基站

图9 同济大学研制的一种观测仪器平台

图10 一种湿插拔连接器及ROV的海底操作
值得一提的是,我国台湾地区近年提出并已开始建设妈祖(MArine Cable Hosted Observatory,MACHO)观测网,如图11所示。由于台湾位于琉球俯冲带和马尼拉俯冲带之间的环太平洋地震带上,将近70%的地震分布在陆地地震网以外的海域中,因此MACHO观测网的初期目标为监测外海地震、海底山崩引起的海啸和紧邻台湾的南冲绳海槽海底火山活动,实现灾害预警和防灾减灾,而长期目标为监测各种海洋要素[71]。MACHO观测网的一期工程启动于2011年,海缆长约为45km,输电电压约为-1kVDC,有一个位于水深300m处的海底主基站,安装有宽频地震仪、短周期地震仪、海啸计、盐温深仪和水听器等观测仪器。未来MACHO观测网将逐渐延伸海缆至约450km,形成环型拓扑,并将增加至4个海底主基站。

图11 我国台湾地区MACHO观测网(scweb.cwb.gov.tw/macho-web)
4 总结和展望
目前国内科研单位已基本突破了缆系海底科学观测网的关键技术,研制成功了大部分核心组网装备的试验样机,但离长期高可靠性的实际工程化应用尚有不少距离。因此针对观测网这一创新性的科学工具,目前尚有不少方面需要深入研究,为将来的大规模建设做好充分准备。
(1)为了降低大规模观测网的工程风险,必须加强全周期的可靠性管理,从各类基础元器件、材料、零件直到整个系统,开展各个层次的可靠性分配、分析和试验。在试验样机的基础上,制定和优化工艺流程设计,进一步提高海底组网设备的电能变换效率和功率密度,实现满足观测网高可靠性的工程化产品。同时积累组网设备的可靠性数据,制定合理的维修策略,建立更为完善的可靠性模型。
(2)建立大规模观测网的计算机仿真平台和实验室模拟平台,并基于高频开关直流变换器的非线性特性,深入研究由大量高压-中压-低压变换器级联形成的海底大规模DC DPS的稳定性分析方法。在此基础上,进一步研究观测网电力系统和通信系统的运行状态在线分析方法,实现对大规模观测网的实际运行状态、故障情况和稳定裕量的实时监测。
(3)把海洋能的利用与大规模观测网结合起来,形成智能化的海底直流微电网和信息网,将是未来观测网的多样化发展趋势。同时,需要进一步开发ROV对观测网的支撑作用和维护能力,针对科学需求开发各类固定式和活动式海底原位实验室,并加强针对海量科学数据的分析和处理方法研究。
参考文献
[1] 汪品先. 从海底观察地球——地球系统的第三个观测平台[J]. 自然杂志, 2007, 29(3): 125-130.
[2] Delaney J, Barga R. A 2020 vision for ocean science[J]. // Hey T, Tansley S, Tolle K. The Fourth Paradigm[R]. USA Washington: Microsoft Research, 2009: 27-38.
[3] Ducklow H W , Doney S C, Steinberg D K. Contributions of Long-Term Research and Time-Series Observations to Marine Ecology and Biogeochemistry[J]. Annual Review of Marine Science, 2009, 1: 279-302.
[4] Person R, Aoustin Y, Blandin J, et al. From bottom landers to observatory networks[J]. Annals of Geophysics, 2006,49(2-3): 581-593.
[5] Bellingham J G, Rajan K. Robotics in remote and hostile environments[J]. Science, 2007, 318(5853): 1098-1102.
[6] Leonard N E, Paley D A, Lekien F, et al. Collective motion, sensor networks, and ocean sampling[J]. Proceedings of the IEEE, 2007, 95(1): 48-74.
[7] Favali P, Beranzoli L. Seafloor Observatory Science: a review[J]. Annals of Geophysics, 2006, 49(2-3): 515-567.
[8] Delaney J, Kelley D. Next-generation science in the ocean basins: Expanding the oceanographer’s toolbox utilizing submarine electro-optical sensor networks[M]. // Favali P,Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss.Springer, 2015: 465-502.
[9] 吕枫, 彭晓彤, 周怀阳, 等. 缆系海底观测网原型系统设计[J]. 仪器仪表学报, 2012(5): 1134-1140.
[10] Lu F, Zhou H, Peng X, et al. Technical preparation and prototype development for long-term cabled seafloor observatories in Chinese marginal seas[M]. // Favali P, Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss. Springer, 2015: 503-530.
[11] Lee F C, Barbosa P, Xu P, et al. Topologies and design considerations for distributed power system applications[J]. Proceedings of the IEEE, 2001, 89(6): 939-950.
[12] Luo S G, Batarseh I. A review of distributed power systems Part I: DC distributed power system[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 5-16.
[13] Emadi A, Johnson J P, Ehsani M. Stability analysis of large DC solid-state power systems for space[J]. IEEE Aerospace and Electronic Systems Magazine, 2000, 15(2): 25-30.
[14] Ehsani M, Emadi A. Multiconverter power systems and their applications[J]. Electric Power Components and Systems, 2001, 29(10): 949-963.
[15] Rahimi A M, Emadi A. An analytical investigation of DC/DC power electronic converters with constant power loads in vehicular power systems[J]. IEEE Transactions on Vehicular Technology, 2009, 58(6): 2689-2702.
[16] Griffo A, Wang J B. Large signal stability analysis of 'more electric' aircraft power systems with constant power loads[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 477-489.
[17] Rivetta C H, Emadi A, Williamson G A, et al. Analysis and control of a buck DC-DC converter operating with constant power load in sea and undersea vehicles[J]. IEEE Transactions on Industry Applications, 2006, 42(2): 559-572.
[18] Emadi A, Khaligh A, Rivetta C H, et al. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives[J]. IEEE Transactions on Vehicular Technology, 2006, 55(4): 1112-1125.
[19] Khaligh A. Realization of parasitics in stability of dc-dc converters loaded by constant power loads in advanced multiconverter automotive systems[J]. IEEE Transactions on Industrial Electronics, 2008, 55(6): 2295-2305.
[20] Baran M E, Mahajan N R. DC distribution for industrial systems: Opportunities and challenges[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1596-1601.
[21] Salomonsson D, Sannino A. Low-voltage DC distribution system for commercial, power systems with sensitive electronic loads[J]. IEEE Transactions on Power Delivery,2007, 22(3): 1620-1627.
[22] 吕枫, 周怀阳, 岳继光, 等. 缆系海底观测网电力系统结构与拓扑可靠性[J]. 同济大学学报(自然科学版),2014(10): 1604-1610.
[23] Howe B M, Kirkham H, Vorperian V. Power system considerations for undersea observatories[J]. IEEE Journal of Oceanic Engineering, 2002, 27(2): 267-274.
[24] Harris D W, Duennebier F K. Powering cabled ocean-bottom observatories[J]. IEEE Journal of Oceanic Engineering, 2002, 27(2): 202-211.
[25] Kirkham H, Lancaster P, Liu C C, et al. The NEPTUNE power system: design from fundamentals[C]. 3rd International workshop on scientific use of submarine cables and related technology, 2003: 301-306.
[26] El-Sharkawi M A, Upadhye A, Lu S, et al. North East Pacific Time-Integrated Undersea Networked Experiments (NEPTUNE): Cable switching and protection[J]. IEEE Journal of Oceanic Engineering, 2005, 30(1): 232-240.
[27] 吕枫, 周怀阳, 岳继光, 等. 东海缆系海底观测试验网电力系统设计与分析[J]. 仪器仪表学报, 2014, 35(4): 730-737.
[28] Vorperian V. Synthesis of medium voltage dc-to-dc converters from low-voltage, high-frequency PWM switching converters[J]. IEEE Transactions on Power Electronics,2007, 22(5): 1619-1635.
[29] Chen Y, Yang C, Li D, et al. Study on 10 kVDC powered junction box for a cabled ocean observatory system[J]. China Ocean Engineering, 2013, 27(2): 265-275.
[30] Chan T, Liu C C, Howe B M, et al. Fault location for the NEPTUNE power system[J]. IEEE Transactions on Power Systems, 2007, 22(2): 522-531.
[31] Maghsoodlou F, Masiello R, Ray T. Energy management systems[J]. IEEE Power and Energy Magazine, 2004, 2(5): 49-57.
[32] Kawaguchi K, Kaneda Y, Araki E. The DONET: A real-time seafloor research infrastructure for the precise earthquake and tsunami monitoring[C]. MTS/IEEE Oceans, 2008: 121-124.
[33] Favali P, Beranzoli L. EMSO: European multidisciplinary seafloor observatory[J]. Nuclear Instruments & Methods in Physics Research Section a-Accelerators Spectrometers Detectors and Associated Equipment, 2009, 602(1): 21-27. [34] Killeen T L. Ocean Observatories Initiative (OOI): Advanced research tools for the ocean sciences[J]. Marine Technology Society Journal, 2010, 44(6): 15-17.
[35] Barnes C R, Best M M R, Pautet L, et al. Understanding Earth-Ocean processes using real-time data from NEPTUNE, Canada's widely distributed sensor networks,Northeast Pacific[J]. Geoscience Canada, 2011, 38(1): 21-30.
[36] Delaney J R, Chave A D, Kirkham H. NEPTUNE: Real-time ocean and Earth sciences at the scale of a tectonic plate[J]. Oceanography, 2000, 13(2): 71-79.
[37] Schneider K, Liu C C, McGinnis T, et al. Real-time control and protection of the NEPTUNE power system[C]. MTS/IEEE Oceans, 2002: 1799-1805.
[38] Liu C C, Schneider K, Kirkham H, et al. State estimation for the NEPTUNE power system[C]. IEEE PES Transmission and Distribution Conference & Exposition, 2003: 748-754.
[39] Schneider K, Liu C C, Howe B. Topology error identification for the NEPTUNE power system[J]. IEEE Transactions on Power Systems, 2005, 20(3): 1224-1232.
[40] Chan T, Liu C C, Howe B M. Optimization based load management for the NEPTUNE power system[C]. IEEE Power Engineering Society General Meeting, 2007: 4138-4143.
[41] 卢汉良, 李德骏, 杨灿军, 等. 深海海底观测网络远程电力监控系统研究[J]. 传感技术学报, 2011, 24(4): 564-569.
[42] 吕枫, 岳继光, 彭晓彤, 等. 用于海底观测网络水下接驳盒的电能监控系统[J]. 计算机测量与控制, 2011,19(5): 1076-1078+1081.
[43] 吕枫, 周怀阳, 岳继光, 等. 缆系海底观测网远程电能监控系统[J]. 同济大学学报(自然科学版), 2014, 42(11): 1725-1732.
[44] Paul J, Scholin C, Van Den Engh G, et al. In situ instrumentation[J]. Oceanography, 2007, 20(2): 70-78.
[45] Romanowicz B, Stakes D, Dolenc D, et al. The Monterey Bay broadband ocean bottom seismic observatory[J]. Annals of Geophysics, 2006, 49(2-3): 607-623.
[46] Brewer P G, Peltzer E T, Walz P, et al. Deep ocean experiments with fossil fuel carbon dioxide: Creation and sensing of a controlled plume at 4 km depth[J]. Journal of Marine Research, 2005, 63(1): 9-33.
[47] Brewer P G, Malby G, Pasteris J D, et al. Development of a laser Raman spectrometer for deep-ocean science[J]. Deep-Sea Research Part I-Oceanographic Research Papers,2004, 51(5): 739-753.
[48] Scholin C, Doucette G, Jensen S, et al. Remote detection of marine microbes, mmall invertebrates, harmful algae,and biotoxins using the environmental sample processor (ESP)[J]. Oceanography, 2009, 22(2): 158-167.
[49] McEwen R S, Hobson B W, McBride L, et al. Docking control system for a 54-cm-diameter (21-in) AUV[J]. IEEE Journal of Oceanic Engineering, 2008, 33(4): 550-562.
[50] Howe B M, Chao Y, Arabshahi P, et al. A smart sensor web for ocean observation: Fixed and mobile platforms, integrated acoustics, satellites and predictive modeling[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2010, 3(4): 507-521.
[51] Teo K, An E, Beaujean P P J. A robust fuzzy autonomous underwater vehicle (AUV) docking approach for unknown current disturbances[J]. IEEE Journal of Oceanic Engineering, 2012, 37(2): 143-155.
[52] Schofield O, Bergmann T, Bissett P, et al. The long-term ecosystem observatory: An integrated coastal observatory[J]. IEEE Journal of Oceanic Engineering, 2002, 27(2): 146-154.
[53] Duennebier F K, Harris D W, Jolly J, et al. HUGO: The Hawaii Undersea Geo-Observatory[J]. IEEE Journal of Oceanic Engineering, 2002, 27(2): 218-227.
[54] Petitt R A, Harris D W, Wooding B, et al. The Hawaii-2 Observatory[J]. IEEE Journal of Oceanic Engineering,2002, 27(2): 245-253.
[55] Austin T C, Edson J B, McGillis W R, et al. A network-based telemetry architecture developed for the Martha's Vineyard Coastal Observatory[J]. IEEE Journal of Oceanic Engineering, 2002, 27(2): 228-234.
[56] Massion G, Raybould K. MARS: The Monterey accelerated research system[J]. Sea Technology, 2006, 47(9): 39-42.
[57] Dewey R, Round A, Macoun P, et al. The VENUS cabled observatory: Engineering meets science on the seafloor[C]. MTS/IEEE Oceans, 2007: 398-404.
[58] Howe B, Duennebier F, Lukas R. The ALOHA cabled observatory[M]. // Favali P, Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss. Springer, 2015: 439-464.
[59] Barnes C R, Best M M R, Johnson F R, et al. Challenges,benefits, and opportunities in installing and operating cabled ocean observatories: perspectives from NEPTUNE Canada[J]. IEEE Journal of Oceanic Engineering, 2013,38(1): 144-157.
[60] Cowles T, Delaney J, Orcutt J, et al. The Ocean Observatories Initiative: sustained ocean observing across a range of spatial scales[J]. Marine Technology Society Journal,2010, 44(6): 54-64.
[61] Kaneda Y. The advanced ocean floor real time monitoring system for mega thrust earthquakes and tsunamis -application of DONET and DONET2 data to seismological research and disaster Mitigation[C]. MTS/IEEE Oceans, 2010: 1-6.
[62] Kanazawa T, Uehira K, Mochizuki M, et al. The Japan trench earthquake and tsunami monitoring network project of cable-linked 150 seafloor observatories (the S-net Project)[C]. Science and Technology 2015, Vienna (Poster).
[63] Person R, Favali P, Ruhl H A, et al. ESONET multidisciplinary scientific community to EMSO novel European research infrastructure for ocean observation[M]. // Favali P, Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss. Springer, 2015: 531-564.
[64] Barnes C, Best M, Johnson F, et al. NEPTUNE Canada: Installation and initial operation of the world's first regional cabled ocean observatory[M]. // Favali P, Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss. Springer, 2015:415-438.
[65] Shirasaki Y, Yoshida M, Nishida T, et al. ARENA: A versatile and multidisciplinary scientific submarine cable network of next generation[C]. 3rd International Workshop on Scientific Use of Submarine Cables and Related Technology, 2003: 226-231
[66] Kawaguchi K, Kaneko S, Nishida T, et al. Construction of the DONET real-time seafloor observatory for earthquakes and tsunami monitoring[M]. // Favali P, Beranzoli L, Santis A. Berlin. Seafloor observatories: A new vision of the Earth from the Abyss. Springer, 2015: 211-228.
[67] Favali P, Beranzoli L, Italiano F, et al. NEMO-SN1 observatory developments in view of the European Research Infrastructures EMSO and KM3NET[J]. Nuclear Instruments & Methods in Physics Research Section a-Accelerators Spectrometers Detectors and Associated Equipment, 2011: S53-S56.
[68] 汪品先, 关于建设海底观测平台的建议[J]. 学会, 2005,1(05): 52-53.
[69] 彭晓彤, 周怀阳, 吴邦春, 等. 美国MARS海底观测网络中国节点试验[J]. 地球科学进展, 2011, 29(9): 991-996.
[70] 张艳伟, 范代读, 许惠平. 东海海底观测网小衢山试验站记录的2010年智利海啸信号分析[J]. 科学通报, 2011,56(32): 2732-2740.
[71] Hsu S K, Lee C S, Shin T C, et al. Marine cable hosted observatory (MACHO) project in Taiwan[C]. Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, 2007: 305-307.
Progress of Scientific Cabled Seafloor Observatory Networks
Lü Feng, Zhou Huaiyang
(School of Ocean and Earth Science, Tongji University, Shanghai 200092, China)
Abstract:Scientific cabled seafloor observatory networks (SCSONs) will be a powerful tool for oceanography research. This paper reviews the state-of-the-art of cabled SCSONs’ five critical technologies, i.e., undersea high-voltage direct-current transmission and distribution, undersea high-voltage high-frequency dc-dc conversion,undersea remote power monitoring and control, undersea long haul information transmission, and in-situ scientific instrument laboratories. The progress of SCSONs around the world is summarized, and the future perspective of SCSONs is also discussed.
Keywords:scientific cabled seafloor observatory networks; undersea high-voltage direct-current transmission and distribution; undersea high-voltage high-frequency dc-dc conversion; undersea remote power monitoring and control; undersea long haul information transmission; in-situ scientific instrument laboratories
中图分类号:P715.5
文献标识码:A
文章编号:1674-4969(2016)02-0139-16
DOI:10.3724/SP.J.1224.2016.00139
收稿日期:2015-12-03; 修回日期: 2016-02-06
作者简介:吕枫(1983-),男,博士,助理教授,研究方向为海底观测网。E-mail: LF@tongji.edu.cn
