拖拉机CAN通信技术研究与试验
2016-06-22闫祥海周志立徐立友张静云
闫祥海,周志立,徐立友,张静云
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
拖拉机CAN通信技术研究与试验
闫祥海,周志立,徐立友,张静云
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
摘要:针对拖拉机控制实时性低和产品间电气匹配性差等问题,以拖拉机电控机械式自动变速器(AMT)控制器为例,基于ISO 11783协议对其控制器局域网(CAN)接口硬件电路及应用层通信协议进行了设计,实现了AMT_ECU与发动机ECU的实时数据通信。利用Allegro PCB软件对控制器信号反射和串扰进行了仿真分析,使用CANcaseXL接口卡将AMT控制器实物接入CAN。利用CANoe软件建立数据库、配置虚拟仪表,使用CAPL语言编程,搭建了以拖拉机AMT控制器为真实节点的系统半实物仿真平台,并对总线系统通信功能和负载率情况进行了监测。测试结果表明:拖拉机AMT控制器CAN接口符合电气硬件要求,可实现与发动机ECU进行CAN信息的发送与接收。
关键词:拖拉机;农业装备;通信网络;半实物仿真
0引言
为了提高中国农机装备水平,加快农业机械自动化和智能化进程,配备标准化和网络化的电子装备变得日益重要。目前,中国农机某些重要部件采用带有标准网络接口的进口设备,如何实现与其他国产部件的正常通信成为产品研制的关键技术[1-3]。ISO 11783国际标准对农林装备、拖拉机串行控制及数据通信总线网络协议进行了明确规范。采用控制器局域网(controller area network,CAN)总线作为农机网络节点连接的标准总线,对传感器、控制部件、执行器、信息存储和显示单元之间的数据传输格式和方法进行了规定,可有效提高农机各项性能,同时压缩了产品开发周期,降低了开发成本[4-5]。
国外对CAN总线技术在农机上的研究已趋于成熟,凯斯纽荷兰(CNH)、芬特(Fendt)和约翰迪尔(John Deere)等农机公司生产的产品实现了整车网络控制及节点信息共享,而CAN总线技术在国产农机上的应用研究目前局限于单个部件,没有形成网络布控,缺乏对网络管理的研究[6-9]。ISO 11783协议的优越性和成熟性在国外已经得到初步体现,设计符合国际标准的产品对中国农机行业的发展具有一定的实用价值。通过解析CAN总线工作原理和ISO 11783协议,本文设计了拖拉机电控机械式自动变速器(automatic mechanical transmission,AMT)控制器CAN接口硬件电路及应用层软件,以期为拖拉机自动化研究奠定技术基础。
1拖拉机CAN网络系统
CAN是一种串行通信网络,为解决车辆实时控制和繁杂布线等问题提供了有效方案[10]。由于其支持高安全等级的分布式实时控制,CAN总线作为国际标准应用于工业领域[11]。ISO 11783协议对CAN总线在农业机械上应用的高层协议进行了明确规定,详细定义了总线网络层与网络管理、拖拉机电子控制单元(electronic control unit,ECU)规范、农机具信息规范、虚拟终端规范、任务控制器规范以及信息管理系统数据通信规范。协议还顾及到农业机械自身的特点以及与精准农业的链接,为实现农业机械的网络化和智能化提供了平台。

图1 拖拉机CAN网络结构图
拖拉机CAN网络被ISO 11783协议分成了拖拉机总线与农具总线两个组成部分,如图1所示[12-13]。拖拉机总线主要用于牵引控制ECU、发动机ECU和变速器ECU等拖拉机主要部件节点的通信;农具总线用于任务控制器、虚拟终端、农具ECU和管理计算机接口等附件设备节点的通信,两部分总线通过拖拉机ECU网关连接,完成拖拉机与农具节点之间的通信。
2拖拉机AMT系统CAN接口硬件设计
2.1CAN接口电路设计
接口硬件对整个系统起着支持和承载的关键作用,拖拉机系统CAN接口设计,必须满足网络系统的数据传输协议,方可实现与其他节点的正常通信。基于ISO 11783协议规范的CAN网络电平特性和物理连接,本文设计了拖拉机AMT系统CAN接口电路,如图2所示。
TMS320F28335芯片集成有两个增强型CAN模块(eCAN,包含eCAN-A和eCAN-B两个接口),设计中选用eCAN-A接口。SN65HVD230是工作电压为3.3 V的 CAN收发器,与TMS320C28xTM系列数字信号处理器(digital signal processor,DSP)工作电压相同,在电源设计方便的同时,可与TMS320C28335中央处理器(central processing unit,CPU)配套使用。CPU与收发器相应引脚相连,进行数据的发送和接收,具体连接方法如图2所示。

图2 拖拉机AMT系统CAN接口电路图
设计中将收发器引脚RS连接一端接地斜率电阻,可有效解决电磁干扰现象,为了消除电路网络中的中频和高频寄生耦合,引脚VCC接3.3 V电压和容抗分别为0.1 μF和10 μF的退耦电容。将120 Ω的电阻接入CAN H和CAN L导线终端,起到抑制网络中信号反射的作用。在CPU和收发器之间加装隔离光耦可增强节点抗干扰能力,但是信号在每个节点都要通过光耦2次,会导致信号延迟。因此,设计中通过增加抗干扰软件代码替代了光耦隔离元器件,以提高系统的抗干扰性能。
2.2CAN接口信号完整性分析
在CAN接口电路设计中,考虑到拖拉机AMT控制器工作频率高和元器件间距小等特性,单凭经验布线容易出现信号反射和串扰现象,影响系统稳定工作。通过信号完整性分析检测系统抗干扰能力,可弥补经验布线的缺失。
阻抗的不连续性会使信号发生反射,设计中使用串联终端匹配技术,为每个驱动器配备一个电阻来减少系统反射现象的发生。例如,将传输线特征阻抗设为50 Ω,则可在CUP和CAN收发器之间设置一个大小为50 Ω左右的匹配阻抗,使匹配电阻功耗最小,信号反射现象减弱,并利用分析工具Allegro PCB对CUP和CAN收发器传输线上的信号反射进行仿真。拖拉机AMT控制器采用6层核心板,由于印制电路板(printed circuit board,PCB)层间电介质层的厚度对传输线特性阻抗有重要影响,传输线阻抗特性的变化会产生不同程度的信号串扰。因此,设计中选取3种电介质厚度对信号串扰进行仿真。反射和串扰仿真波形如图3和图4所示。
图3中,发射端与接收端波形基本吻合,信号的过冲和下冲现象都不严重,能够确保系统稳定运行。图4中,电介质层厚度d越小,产生的信号串扰越小,因此,核心板的电介质层厚度选为91.44 μm。
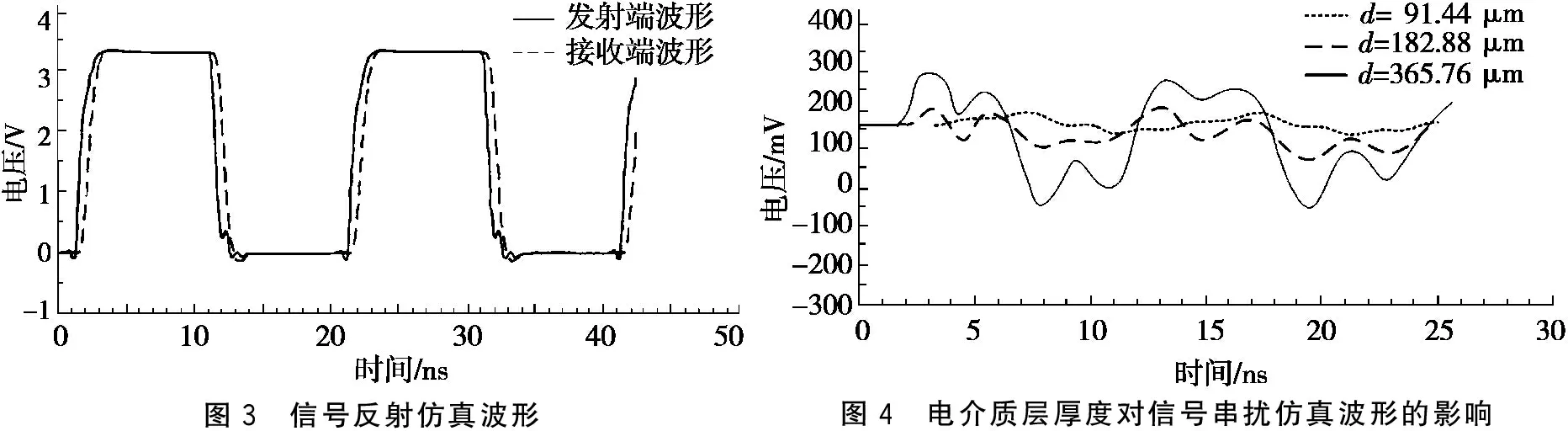
图3 信号反射仿真波形图4 电介质层厚度对信号串扰仿真波形的影响
3拖拉机AMT系统CAN接口软件设计
3.1数据帧的定义
ISO 11783协议将CAN扩展格式数据帧划分为帧起始、控制场、仲裁场、数据场、应答场、校验场和帧结尾,对拖拉机及农具ECU通信内容和方式进行了详细规范。协议第8部分动力传动系信息以J1939/71为参考进行定义。本文以变速器挡位信息报文为例,对其数据帧仲裁场和数据场进行了定义。
变速器挡位报文是变速器控制器向总线发送的信息,默认优先级为6,数据长度为8字节,协议数据单元格式(PF)为240,数据页为0。变速器挡位信息报文仲裁场具体数值如表1所示。

表1 变速器挡位信息报文仲裁场数值
注:P.默认优先级;R.保留位;DP.数据页;PF8-3.PDU格式第8位到第3位;SRR.替代远程请求位;IDE.识别符扩展位;PF2-1.PDU格式第2位到第1位;PS.特定协议数据单元;SA.源地址。
协议对数据场的每个字节进行了明确定义,表2列出了变速器挡位数据场各个字节的参数含义。

表2 变速器挡位数据场参数
采用同样的方法可以获得其余拖拉机及农具网络节点的报文数据帧,其中,发动机ECU和自动变速器ECU节点数据信息如表3所示。

表3 节点报文数据帧
3.2CAN接口初始化
对位时间配置寄存器进行编程能够确定总线通信速率,完成CAN模块的初始化,与通信速率相关的信息如表4所示。

表4 通信速率相关的基本信息
注:BRP为波特率预定标器寄存器值加1。
系统通信速率为500 kb/s,位时间为2 000 ns,SYNC_SEG段为固定的1 TQ,PROP_SEG 取15 TQ,PHASE_SEG1取8 TQ,PHASE_SEG2取6 TQ。
4CANoe半实物仿真测试
Vector公司的CANoe系统为CAN总线的开发提供了集成模型创建、半实物仿真、在线物理仿真、系统分析和测试等功能。本文使用CANcaseXL的Channel1通道,将作为真实节点的拖拉机AMT控制器接入CANoe中,与发动机虚拟节点搭建CAN网络仿真拓扑结构,经过建立数据库、配置显示面板和CAN总线编程语言(CAN access programming language,CAPL)编程完成半实物仿真测试。半实物仿真平台由计算机、仿真器、AMT控制器和CANcaseXL接口卡组成。拖拉机CAN网络仿真拓扑结构包含AMT_ECU与Engine_ECU两个节点,采用ISO 11783标准对报文数据场中部分字节进行了数据设定。
运行半实物仿真平台,进行系统工作过程监测,可得到所构建网络的通信信息,结果见表5和表6。

表5 拖拉机CAN通信运行结果

表6 半实物仿真总线状态
表5显示了CAN网络上传输的各信号报文信息。从表5中可以看出:发动机ECU节点向总线发送了3条报文,报文EEC1中发动机转速为1 355 r/min,报文ET2中发动机油液温度为63 ℃,报文ET3中冷却液温度为91 ℃。变速器ECU向总线发送了1条报文,包含变速箱当前挡位与目标挡位两个参数,表5中所示的当前挡位为2,目标挡位为1,系统完成了拖拉机AMT与发动机之间的通信功能。
从表6所示的半实物仿真总线状态中可以看出:真实物理节点接入后,总线负载率为8.08%,峰值负载率为27.69%,错误帧数据量为0。由于测试中没有设置抗干扰措施,峰值负载率较高。但总线负载率低于30%,满足通信的实时性和可靠性要求,达到了总线网络系统性能设计的目标。
5结束语
本文在分析拖拉机应用CAN总线技术必要性和可行性的基础上,以拖拉机AMT控制器为例,基于ISO 11783协议对拖拉机AMT系统CAN接口硬件和应用层软件进行了设计。利用Allegro PCB软件对控制器信号的反射和串扰现象进行了信号完整性仿真分析,以AMT控制器为真实物理节点构建了CAN网络半实物仿真平台,实现了变速器控制器和发动机控制器数据的通信与共享。通过节点开发和系统仿真,为拖拉机控制系统的自动化研究提供了一定的途径。
参考文献:
[1]徐立友,周志立,彭巧励,等.多段式液压机械无级变速器方案设计与特性研究[J].中国机械工程,2012,23(21):2641-2645.
[2]方树平,周志立,徐立友.串联式混合动力拖拉机能量管理策略[J].河南科技大学学报(自然科学版),2015,36(6):61-66.
[3]ZHOU Z L,YAN X H,XU L Y,et al.Hardware design of tractor AMT controller based on DSP[J].JCIT:journal of convergence information technology,2013,8(10):567-574.
[4]Tractors and machinery for agriculture and forestry-serial control and communications data network-part 4:network layer:ISO 11783—4[S].Switzerland:ISO,2006.
[5]XU L Y,YAN X H,ZHOU Z L,et al.Design of CAN interface in tractor AMT control system based on DSP[J].Journal of convergence information technology,2013,8(10):575-582.
[6]周建军,郑文刚,李素,等.基于ISO 11783的拖拉机导航控制系统设计与试验[J].农业机械学报,2010,41(4):184-188.
[7]周志立,夏先文,徐立友,等.电动拖拉机驱动系统设计[J].河南科技大学学报(自然科学版),2015,36(5):78-81.
[8]Tractors and machinery for agriculture and forestry-serial control and communications data network-part 8:power train messages:ISO 11783—8[S].Switzerland:ISO,2006.
[9]GAO C X,ZHANG Z,WANG Y F.The hardware design of switched reluctance drive system based on DSP TMS320LF2407A[J].Journal of convergence information technology,2012,7(15):227-235.
[10]XU L Y,ZHOU Z L,WANG B B.Study on matching strategies of hydro-mechanical continuously variable transmission system of tractor[J].International journal of digital content technology and its applications,2013,7(4):843-849.
[11]赵剡水,杨为民.农业拖拉机技术发展观察[J].农业机械学报,2010,41(6):42-48.
[12]曹付义,邓瑞涛,郭广林,等.双流传动的拖拉机转向工况换段过程[J].河南科技大学学报(自然科学版),2014,35(6):75-79.
[13]YU S Z,XU X D.An input and output monitoring system for FPGA-based hardware PLC[J].International journal of engineering inventions,2012,3(1):34-44.
基金项目:国家自然科学基金项目(51375145);河南省重点科技攻关计划基金项目(142102210424);河南科技大学青年科学基金项目(2014QN017,2015QN001)
作者简介:闫祥海(1985-),男,山西晋中人,助教,硕士,主要研究方向为车辆新型传动理论与控制;周志立(1957-),男,通信作者,河南偃师人,教授,博士,博士生导师,主要研究方向为车辆新型传动理论与控制.
收稿日期:2016-03-07
文章编号:1672-6871(2016)04-0071-05
DOI:10.15926/j.cnki.issn1672-6871.2016.04.015
中图分类号:S232.3
文献标志码:A