一种火星车移动系统的设计与实现
2016-06-22丁亮亮杨晓青
宗 魏,肖 杰,丁亮亮,杨晓青
(1.上海市空间飞行器机构重点实验室,上海 201108;2.上海宇航系统工程研究所,上海 201108)
一种火星车移动系统的设计与实现
宗魏1,2,肖杰1,2,丁亮亮1,2,杨晓青2
(1.上海市空间飞行器机构重点实验室,上海 201108;2.上海宇航系统工程研究所,上海 201108)
摘要:针对火星车系统构型、车轮和驱动关节展开了优化设计,建成通过能力较强的新型移动系统。通过单轮台架试验和整车性能试验,验证了新型火星车移动系统在行进、爬坡、越障和蠕动能力方面均能满足使用的要求。
关键词:火星车;移动系统;设计与分析
0引言
火星探测一直是世界各国所热衷研究的航天项目。美国成功登陆火星的三代火星车“索杰娜”、“勇气号、机遇号”和“好奇号”均采用了六轮摇臂式移动系统,质量分别为11.5 kg、170 kg和899 kg。火星车体积和质量逐渐增大,行走能力和地形适应性也逐渐增强,但同时给运载系统和着陆系统带来了严峻的考验。美国国家航空航天局突破性地采用“空中吊车”技术,将“好奇号”送上了火星。“好奇号”的大车轮使其在火星表面如履平地,可跨过0.5 m的物体,并且每个车轮配备防滑钉,确保车辆可以在松软的沙子上行驶[1-5]。中国在探月工程中已经成功使用腿式着陆器,将“玉兔号”月球车送上了月球,开展了月面巡视探测,而更远距离的火星到达和着陆更具挑战。本文在中国现有运载能力和着陆技术的基础上,研究适应火星环境的新型移动系统,开展200 kg左右火星车的新型移动系统的方案优化。主要通过结构构型的优化,增强火星车的行走能力,使之能够满足中国火星探测的需求 。
1新型火星车移动系统设计
火星表面地形崎岖,堆积物大小混杂,不同尺寸岩石遍布,多具棱角状。而且由于尘暴影响,局部地区承压性能差。火星车需要具备30°爬坡、350 mm越障以及摆脱沉陷的能力,以适应火星地形环境。
1.1新型火星车移动系统构型设计
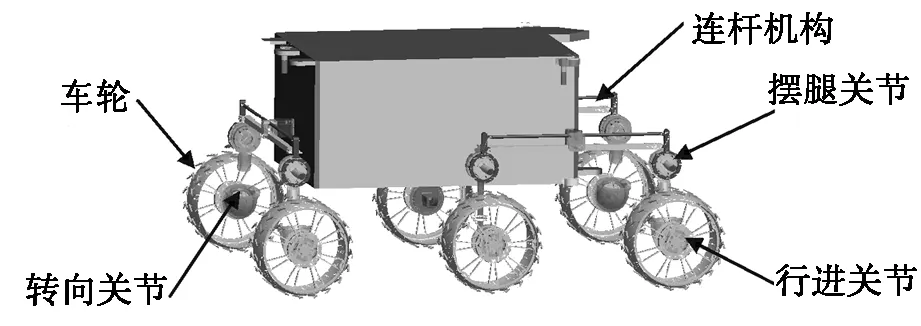
图1 新型火星车移动系统
新型火星车移动系统由3组相同的模块化部件组成,每个部件由车轮、连杆机构、行进关节、转向关节和摆腿关节等组成,如图1所示。
一体化车轮支撑火星车载荷,驱动机构将动力传递到车轮,通过车轮与火星土壤相互作用提供移动的牵引力。行进关节实现车轮的正转与反转。转向关节实现左、右转向。摆腿关节实现轮系的前摆和后摆,实现移动系统的蠕动功能。连杆机构连接火星车本体与驱动机构,平衡火星车本体姿态。


图2 两种连杆机构受力分析
1.2车轮设计
以Bekker理论为基础,结合中国行星探测的需求,初步筛选火星车车轮构型,并通过单轮台架试验,评价各车轮的牵引性能[8-9]。
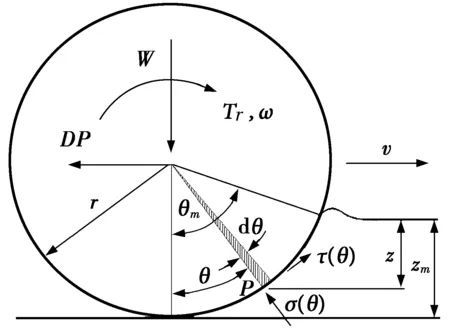
图3 刚性车轮滚动受力图
1.2.1车轮与地面作用分析
根据车辆地面力学的理论,刚性车轮底面与土壤接触区域内任意一点的应力,可分解为法线方向的正应力和切线方向的剪应力,车轮的滚动受力情况如图3所示。
图3中,σ(θ)为车轮底面在接触区域内任一点P受到的正应力,MPa,与地面垂线夹角为θ;τ(θ)为车轮在P点受到的剪应力,MPa;W为施加在车轮上的垂直载荷,N;Tr为车轮驱动转矩,N·m;DP为车轮受到的挂钩牵引力,N;ω为车轮滚动角速度,rad/s;v为车轮前进的线速度,m/s;r为车轮半径,m;θm为车轮渐近角,(°);刚性车轮的离去角很小,这里忽略。
对车轮建立力平衡方程,有如下关系式[8-10]:

(1)

(2)
1.2.2车轮转矩分析
驱动轮与土壤的相互作用可以分解为接触面的正应力与剪应力,其中,剪应力与车轮转矩有关,只有当驱动给予车轮的转矩不小于剪应力产生的转矩时,车轮才能转动。转矩公式如下[8-9]:
(3)
当刚性车轮有棘爪时,转矩为:

(4)
其中:Fp为土壤对棘爪的作用力,N;r为车轮半径,m;b为车轮宽度,m;hb为棘爪高度,m。

Nφ=tan2(45+φ/2),
其中:γs为土壤容重,g/cm3;q为法向压力,kPa;Nφ为承载因数;c为内聚力,kPa;φ为内摩擦角,(°)。
1.2.3车轮选型
不同种类车轮性能各异。刚性筛网轮质量轻,可避免尘土的堆积存留,转向阻力小,拖拽阻力小,但沉陷量较大;刚性壳体轮结构简单可靠,地形适应性强,但易堆积尘土;弹性筛网轮减振性能和行驶性能好,适合高速行驶,但轴向刚度差,质量大,结构复杂。

图4 刚性壳体轮
对不同车轮结构特点分析比较,从火星环境适应性、结构布局需求和可靠性方面考虑,结合火星车低速行驶和轻量化设计的需求,适合火星车车轮结构方案的是刚性壳体轮,如图4所示。车轮主要由轮辐、轮毂和胎面组成。
1.2.4台架试验
测试车轮在不同参数(滑转率、轴向载荷等)下的行驶性能,得到车轮行驶能力与不同运动参数的关系[10-12]。火星车车轮在7 kg和20 kg载荷条件下,台架试验的结果见表1和表2,车轮性能满足行驶要求。

表1 7 kg载荷车轮台架试验结果
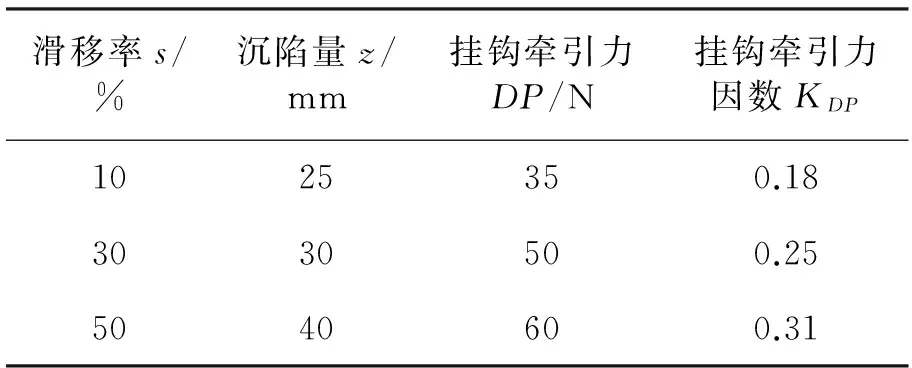
表2 20 kg载荷车轮台架试验结果
1.3驱动机构设计

图5 驱动机构关节样机
国外成功开展行星探测的星球车轮系统驱动关节主要有3种形式:(Ⅰ)电机连接多级行星减速器。由于行星减速器环境适应性宽、润滑方便、简单可靠和效率高,早在“月球车-1”、“月球车-2”中就已经采用。(Ⅱ)电机连接谐波减速器。谐波减速器传动比高,传递扭矩大,能够有效地减轻质量,此方案在“阿波罗”系列中使用。(Ⅲ)电机连接行星减速器以及谐波减速器。此方案能够实现大的减速比,对电机扭矩需求小,美国“勇气号”和“机遇号”均使用此方案。
2试验验证

图6 火星车移动系统性能试验现场
火星车移动系统性能试验[14-18],主要工况包括:30°爬坡试验、350 mm越障试验和蠕动步态试验。试验现场如图6所示。
2.130°爬坡试验
在模拟火星环境试验场设置30°的坡度,测试移动系统能否完成此坡度的爬行功能。测试速度为13.8 mm/s,每个车轮的最大电流如表3所示。

表3 30°爬坡试验数据
爬坡时,转向关节与摆腿关节处于制动状态,6个行进关节电流最大值为0.55 A,远小于电流阈值(1 A),表明火星车30°爬坡时仍具有较大能力余量,可满足火星着陆区域地形要求。
2.2350 mm越障试验
设置障碍高度为350 mm,验证火星车的越障能力。测试速度为13.8 mm/s,每个车轮的最大电流如表4所示。

表4 350 mm双边越障试验数据
越障时,转向关节与摆腿关节处于制动状态,6个行进关节电流最大值为0.61 A,小于电流阈值(1 A),表明火星车具有足够的越障能力,可越过高度为350 mm的石块,在着陆区域内安全行走。
2.3蠕动步态试验
火星车摆腿关节结合行进关节可实现蠕动步态,用于软土沉陷时的脱困,按照如图7所示的前轮摆动-中轮摆动-后轮摆动的时序进行步态试验,单个时序循环移动系统从初始状态前移距离s。测试行进速度为0.4 mm/s,设置摆腿关节的速度为0.5°/s,每个车轮的最大电流如表5所示。

图7 蠕动步态试验图

试验参数左前行进右前行进左中行进右中行进左后行进右后行进左前摆腿右前摆腿左中摆腿右中摆腿左后摆腿右后摆腿最大电流/A0.380.370.410.420.390.370.450.480.430.380.420.47行进v/(mm/s)0.390.410.490.420.430.37摆腿v/(°/s)0.520.460.530.410.470.42
行进车轮最大电流为0.42 A,摆腿车轮最大电流为0.48 A,小于电流阈值(1 A),因此,当遇到火星松软路面沉陷时,火星车可通过蠕动步态脱困。
火星车在30°爬坡试验、350 mm越障性能试验和蠕动步态试验过程中,各项参数均满足设计指标要求。
3结束语
本文研究了一种新型的火星车移动系统,具有前进、转向和蠕动等功能。在中国现有的月球车基础上,增加了蠕动功能,具备了更强的越障能力。火星车悬架的四边形结构,增强了火星车整体的稳定性,提高了地面通过性能。通过台架试验和整车试验,验证了行进、爬坡、越障和蠕动等能力能够满足火星车的需求。
参考文献:
[1]GUAN X,WANG X,ASTRONAUTICS S O,et al.A design of autonomous navigation scheme based on vision for the Mars rovers[J].Aero weaponry,2015(1):23-27.
[2]东方星.2014年回顾世界空间探测[J].国际太空,2015(2):32-41.
[3]SQUYRES S.登陆火星[M].王斌,译.北京:中国宇航出版社,2008:254-286.
[4]GROTZINGER J P.Analysis of surface materials by the curiosity Mars rover[J].Science,2013,341(6153):1475.
[5]ALEXANDRA W.NASA plans Mars sample-return rover[J].Nature,2014,509(7500):272.
[6]黄卫东,鲍劲松.月球车坡路行驶地面力学模型与运动性能分析[J].机械工程学报,2013(5):17-23.
[7]李春书,崔根群.基于车辆地面力学的轮式移动机器人力学模型及分析[J].河北工业大学学报,2015(4):48-52.
[8]龚晓南.高等土力学[M].杭州:浙江大学出版社,1996.
[9]张克健.车辆地面力学[M].北京:国防工业出版社,2002.
[10]LI Y W,LI J Q,ZOU M,et al.Simulation of traction ability of lunar rover with different mechanics of lunar soil[J].Transacions of the CSAE,2009,40(1):1-4.
[11]SENATORE C.Off-road tire modeling and the multi-pass effect for vehicle dynamics[J].Journal of terramechanics,2011,48(4):265(12).
[12]LI J Q,ZOU M,JIA Y,et al.Research on the interaction between lunar rover wheel and lunar soil by simulation[J].Transacions of the CSAE,2008,39(4):1-4.
[13]董晓,陈东照.轿车轮毂轴承疲劳寿命的计算与分析[J].河南科技大学学报(自然科学版),2014,35(5):19-23.
[14]BROOKS C,IAGNEMMA K,DUBOWSKY S.Visual wheel sinkage measurement for planetary rover mobility characterization[J].Autonomous robots,2006,21(1):55-64.
[15]ZHAO Z J,ZOU M,ZHANG R R,et al.Preliminary tests and mechanical property test-bed of soil for lunar surface sampler[J].Transacions of the CSAE,2013,44(s1):288-291.
[16]丁亮亮,肖杰,宗魏,等.与沉陷相关联的星球车挂钩牵引力模型研究[J].农业机械学报,2014,45(12):37-42.
[17]宗魏,肖杰,丁亮亮,等.星球车步态规划与修正[J].上海航天,2016,33(1):33-37.
[18]陈百超,贾阳,王荣本,等.高通过性与平稳性月球车移动系统设计[J].机械工程学报,2008,44(12):143-149.
基金项目:上海市科学技术委员会基金项目(12170700500)
作者简介:宗魏(1985-),女,江苏宜兴人,工程师,硕士,主要研究方向为星球车系统设计.
收稿日期:2015-12-20
文章编号:1672-6871(2016)04-0015-05
DOI:10.15926/j.cnki.issn1672-6871.2016.04.004
中图分类号:V19
文献标志码:A