混凝土泵车臂架抑振技术研究与应用
2016-06-21沈明星方艺平
沈明星,方艺平
(泵送研究院,三一重工股份有限公司,湖南长沙,410100)
混凝土泵车臂架抑振技术研究与应用
沈明星,方艺平
(泵送研究院,三一重工股份有限公司,湖南长沙,410100)
混凝土泵车在泵送换向过程中产生液压冲击、混凝土不连续冲击、冲击频率与臂架固有频率区接近,使得末节臂架在垂直方向抖动达1米以上,直接影响了臂架的寿命及操作人员的人身安全,同时泵车臂架是一个大惯性、大延迟、非线性系统,传统控制方法很难奏效,全球主要泵车制造厂家均不遗余力地进行减振研究.本文概述了国内外一些厂家在被动减振控制、主动减振控制的研究成果与进展,并对臂架振动抑制控制技术进行了展望.
振动控制; 泵车; 臂架; 减振
0 引言
混凝土泵车是一种用于输送和浇注混凝土的专用机械,它配有装载于多节臂架上的特殊输送管,可以将混凝土沿管道连续输送到浇注现场.在工作过程中不可避免会出现臂架的振动,引起泵车臂架振动主要有以下两方面原因:
(1) 由液压系统本身引起的冲击.泵送工作是依靠摆动油缸配合主油缸的往复换向运动来实现的.特别在开式系统中,主油泵流量很大,主油缸运动速度很快,换向时间短,换向阀在换向时会产生巨大的压力冲击,改善换向阀的换向性能可以减小冲击,但不能消除冲击.
(2) 由混凝土负载变化引起的冲击.主油缸由吸入行程到泵送行程换向停顿的瞬间,分配阀导通,输送缸中的低压混凝土与管路中的高压混凝土接触产生巨大压力,通过输送管传递给臂架.因此,一方面在换向前的瞬间,减少主油泵流量,降低对主缸的冲击,另一方面在换向后的瞬间,应迅速增加主油泵流量对混凝土预压缩,实现混凝土连续,降低对输送管的冲击.
臂架受到冲击而发生振动.尤其,当液压冲击频率与臂架的最低阶固有频率耦合时,将会发生共振,特别是末端臂架处垂直方向上可能出现较大的振幅.振动引起臂架出现早期裂纹甚至断裂,也使得泵车稳定性变差引起倾翻,同时影响浇注工程施工质量、增加施工难度,危害操作人员安全.
1 被动振动控制
1.1 被动振动控制的主要原理
根据振动系统的分析,可以得出控制振动幅值的主要因素:
(1) 降低干扰力幅值.
(2) 改变干扰力频率与系统固有频率之比.即通过改变臂架的结构形状、采用弹性元件协调刚度和质量,也可以通过抑振器改变系统的固有频率.
(3) 在机械机构内增加阻尼力,即通过在系统上增加一个专门的阻尼器或阻尼材料来减小振幅.
1.2 被动臂架减振应用实例一——闭式液压系统
普茨迈斯特公司在泵送回路采用闭式系统(或称为自由流动系统FFH-Free Flow Hydraulics),如图1所示,油泵是双向的,泵送油缸的换向是靠油泵换向实现的,油泵处于中位(斜盘摆角为零)时,泵送油缸处于停止状态,做到了泵送换向零排量控制,可使液压冲击降到最低.另外,在闭式系统中同时采取SN控制阀技术,能有效消除由于泵送换向时低压砼与高压砼接触时造成的液压冲击及主油泵吸空.

图1 闭式泵送液压系统简图Fig.1 Schematic of closed pump hydraulic system
1.3 被动臂架减振应用实例二——换向流量调节
由于吸入料缸的混凝土中含有空气,此时的混凝土具有较大的压缩性.在换向结束后,系统要求主油泵给主油缸最大的流量、以最快的速度压实吸入的混凝土.当输送缸中的压实混凝土与管路中的高压混凝土接触时,又要求主油泵流量迅速减少,提供足够的推力,而后再以正常速度泵送.因此依照如图2所示的主油泵流量循环简图控制主油泵流量能够有效减小冲击[1].

图2 主泵流量循环图(左图为实测流量,右图为过程分析)Fig.2 The main pump flow diagram(left:measured flow,right:process analysis)
1.4 被动臂架减振应用实例三——混凝土连续泵送
如图3所示,在出料口上设置一个补偿油缸,泵送期间,出料口中的一部分混凝土进入该补偿缸预存,分配阀工作期间,补偿缸启动工作将其缸内预存的混凝土排出,补偿因分配阀切断造成输送管中的混凝土输送中断,从而实现连续泵送[2].
1.5 被动臂架减振应用实例四——提高固有频率
试验研究表明,现有泵车臂架系统一阶固有频率与泵送工作频率部分重合,引起较大振动.通过改变结构尺寸、质量、刚度和自由度来提高或降低泵车臂架的一阶固有频率以避开工作频率.普茨迈斯特和施维茵均在减轻臂架重量上采取了积极措施,如采用特殊材料、复合材料降低质量,同时提高其刚度,使臂架的固有频率提高,避开冲击干扰的频率[3-5].
1.6 被动臂架减振应用实例五——阻尼隔振材料
在振动传递的过程中增加阻尼力,通过粘弹性阻尼材料来消耗能量.合成橡胶作为常见的阻尼材料被广泛应用于工程机械领域.在泵车中,泵送系统、发动机等产生振动的部件与底盘连接部位,多采用橡胶垫附着于连接处表面,有效减小了一部分通过底盘向臂架传递的振动.
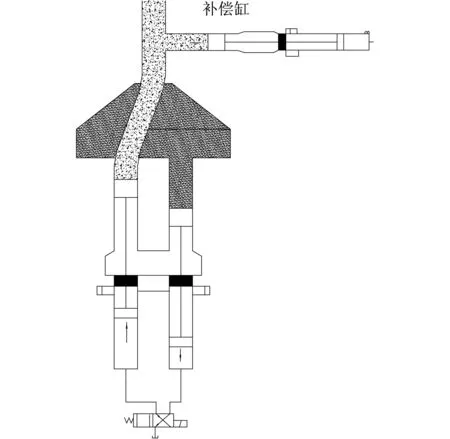
图3 补偿缸系统液压机械原理图Fig.3 Hydraulic machinery principle diagram of compensating cylinder system
2 主动振动控制
2.1 主动振动控制的主要原理
振动的主动控制又称为振动的有源控制,是指利用某种外部能量产生一种可以控制的作用力或位移来抵消振动.由图4可见,在系统中设置一个可控的动力装置,一般这种动力装置均采用液压缸.液压缸在电磁阀的控制下,产生一个与质量m的位移x方向相反,大小相等的位移u,即u+x=0.
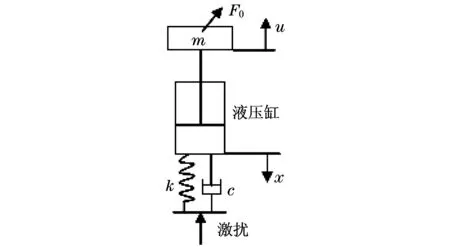
图4 主动减振系统的工作原理Fig.4 The working principle of active vibration reduction system
主动振动有开环控制与闭环控制.闭环控制又称为反馈控制,是目前用的比较多的一种.主动振动有很多优点,减振效果好,能适应不可预知的外界扰动以及结构参数的不确定性,对原结构的改动不大,调整方便.
2.2 主动臂架减震应用实例一——开环油缸补偿抑振控制
通过试验及ADAMS动力学仿真分析发现,造成臂架大幅振动原因是主输送缸的液压冲击是周期性的,除冲击的频率(激励频率)与臂架的固有频率接近导致共振外,冲击的幅值大小也是导致臂架振动大的原因,液压冲击大小与泵送排量大小存在对应关系.
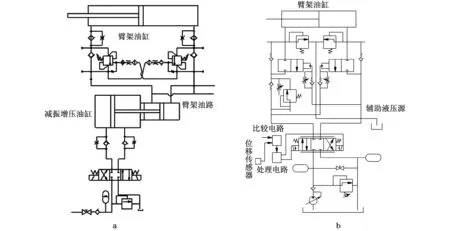
图5 液压系统原理Fig.5 Hydraulic system principle
国内某企业开发了开环油缸补偿抑振技术,在每个周期内,给臂架某个油缸施加反向抑制力,在不同排量给予不同的抑制力.控制的液压原理如图5(a)s所示[6].
2.3 主动臂架减震应用实例二——闭环并联弹簧阻尼补偿控制
将臂架油缸等效为带弹簧和阻尼装置,分析在臂架油缸处的力有:
(1)
式中Ft(t)——由扰动产生作用于油缸活塞杆上的力;
d——臂架油缸等效阻尼系数;
c——臂架油缸等效弹性系数;
s(t)——臂架油缸的位置;

根据式(1)可得,
(2)
在设计臂架油缸时是可以确定弹性系数和阻尼系数,位移传感器可以测定臂架油缸位移量,通过活塞杆运动的速度、以及根据两活塞腔的压力可以判断活塞的运动方向.采取如图6控制框图的控制方法,可以通过速度控制器控制液压缸操作阀来达到有效抑制振动的理想速度[7].

图6 操作系统示意图Fig.6 Schematic diagram of operating system
2.4 主动臂架减震应用实例三——闭环补偿抑振控制
如图5(b)所示,该例通过对设置在末端臂架的液压油缸的辅助压力源进行控制来减小末端臂架振动幅值.通过传感器测量末端软管同水平基准面间的距离,包括:(1)用于获得布料杆顶端和基准面之间距离信息的距离传感器,(2)主要位于布料杆末端的加速传感器;(3)用于吊架末端部分的倾角传感器.在一个比较电路中与一个可设定的数值进行比较进行,比较电路不断产生输出信号,这些输出信号包含了关于臂架末端位置与平衡位置的差值.比较电路产生的输出信号由处理电路根据末端振动量的大小转换成辅助液压源流量大小的控制信号,控制臂架油缸运动,进而控制末端软管回到平衡位置[8].
2.5 主动臂架减震应用实例四——最优H_∞状态反馈控制器设计
臂架对象具有大迟延、大惯性、时变性和非线性等特点,采用传统的控制方法很难获得满意的控制性能.对系统模型的参数不确定性进行了分析,并把其归结为标准的H∞设计问题.综合考虑系统的稳定性和调节时间等指标,采用具有闭环区域极点约束的最优H∞状态反馈控制器设计方法,使用线性矩阵不等式(LMI)方法对其进行求解.
(3)
(4)

(5)

(6)
式中W1——性能加权函数;
W2——鲁棒加权函数;
P——操作量到电源装置而设置的控制对象;
Pd——外干扰力到电源装置而设置的控制对象;
Pyd——从干扰d的输入到电源装置输出yp的传递函数;
Pyr——从操作者u的输入到电源装置输出yd的传递函数;
W1,W2——各控制量z1,z2的加权函数,z1,z2表示控制量,W表示假设干扰;
yp——电源装置输出.
仿真及实测结果表明,基于LMI方法的鲁棒控制策略,可以有效抑制被控对象参数变化及控制器参数变化对系统性能的影响,提高系统的鲁棒性[9].

图7 采用本例时的脉冲反应图Fig.7 The impulse response in this case

8 采用以往手法时的脉冲反应Fig.8 Impulse response in the past
3 总结与展望
3.1 总结
(1) 分析了泵车臂架振动产生的主要原因是两活塞缸工作换向时,载荷交替变化产生的冲击.尤其当液压冲击频率与臂架的最低阶固有频率耦合时,会加剧臂架的摆动.
(2) 通过对主动、被动控制理论的分析,概述了减小振动的主要措施.主要包括,降低干扰力幅值、改变干扰力频率与系统固有频率之比、在机械机构内增加阻尼力等被动控制方法,及通过实时改变系统结构参数、产生与干扰力作用相反的力或力矩等主动控制方法.
3.2 展望
(1) 泵车臂架系统属于轻质、大型、重载的柔性臂系统,该系统既可做空间大范围刚体运动与弹性变形相互耦合的运动,又是混凝土的输送载体,是典型的多输入、多输出、高度非线性、多种物理规律耦合的复杂系统.因此在以后的研究中应注重整体振动分析,提出液压部分、控制部分、机械部分相结合的整体减振方案.
(2) 在主动振动控制方面,泵车臂架的现阶段主要重视对施加实时外力方面的振动控制的研究和应用.随着振动学科的发展,出现刚度可调的弹性元件和阻尼可调的阻尼元件,可以考虑设计刚度、阻尼和外力可综合调节的臂架减振系统.
(3) 泵车臂架是一种大惯量系统,在纵向垂直变幅或横向回转启动、制动时存在明显的晃动,这也是臂架抖动需要抑制的一个重要方面.较常用的是液压调节方法如:基于压差传感的进、出口节流独立调节,可以缩短大惯量负载加速时间,避免减速及制动过程中出油侧的压力冲击.另一种方法是电流调节,使操作多路阀的比例电流按照一定规律的斜坡函数输出,而不是原来的阶跃函数,可使施工时臂架运动平稳.
(4) 在进行理论探讨振动控制方案的同时,也要注意试验研究的重要性,只有理论模型是不可靠的,是否可行需要得到试验的验证.
[1] 荆宝德.混凝土输送泵关键技术的研究[D].吉林:吉林大学,2005.
JING Baode,Concrete delivery pump essential technology research[D].Jilin:Jilin University,2005.
[2] 弗里德里克-威尔-施温有限公司.具有输送缸的混浆泵,尤其是双缸混浆泵[P].中国专利:CN 93104397.
Frederic weir Schwinn Co.Ltd.Concrete pump with conveying cylinder,especially double cylinder concrete pump[P].Chinese patent:CN 93104397.
[3] 刘杰,戴丽,赵丽娟,等.混凝土泵车臂架柔性多体动力学建模与仿真[J].机械工程学报,2007(11):131-135
LIU Jie,DAI Li,ZHAO Lijuan,et al.Flexible multi-body dynamics modeling and Simulation of concrete pump truck boom[J].Journal of Mechanical Engineering,2007(11):131-135.
[4] 张铁民,李成元.带有反馈控制的柔性机械臂动态研究与振动控制[J].机械工程学报,2000(3):47-50
ZHANG Tiemin,LI Chengyuan.Dynamic research and vibration control of a flexible manipulator with feedback control[J].Journal of Mechanical Engineering,2000(3):47-50.
[5] 邱志成.基于加速度反馈的挠性智能结构振动主动控制[J].机械工程学报,2008(3):143-151.
QIU Zhicheng.Active vibration control of flexible intelligent structures based on acceleration feedback[J].Journal of Mechanical Engineering,2008(3):143-151.
[6] 三一重工股份有限公司.用于抑制混凝土泵车臂架振动的方法及装置[P].中国专利:CN 1932215A.
SANY,Method and device for suppressing vibration of concrete pump truck boom[P],Chinese patent:CN 1932215A.
[7] 弗里德里克-威尔-施温有限公司.具有振动阻尼的大型操纵器[P].中国专利:CN 1486384A.
Frederic weir Schwinn Co.Ltd.Large manipulator with vibration damping[P].Chinese patent:CN 1486384A.
[8] 普茨迈斯特混凝土机械有限公司.配有布料杆的混凝土泵[P].德国专利:DE019503895A1.
Putzmeister Concrete Machinery Co.Ltd Concrete pump with cloth rod[P].German patent:DE019503895A1.
[9] 三菱重工.臂架制振装置[P].日本专利:P2000-170380.
MITSUBISHI Heavy Industries,Boom vibration device[P].Japan patent:P2000-170380.
Research and application of vibration-suppression technologies for truck mounted concrete pump booms
SHEN Ming-xing,FANG Yi-ping
(Academe of Concrete Pump,SANY Heavy Industry Co.Ltd.,Changsha 410100,China)
Due that the truck mounted concrete pump produces hydraulic and concrete impacts on pump exchanging, the upright amplitude of bottom boom, which exceeds one meter, affect the handler life and safety. Subsequently, such manufacturers as SANY attempt efforts on vibration suppression, whereas active control and passive controls on vibration are reviewed. Consequently, the technological advances of vibration suppression are presented for truck mounted concrete pump booms.
Vibration control; Truck mounted concrete pump; Boom; Vibration suppression
国家“863”研发项目(2008AA042802_混凝土泵车远程监控及维护应用系统研制)。
沈明星(1982-),男,工学硕士,主任工程师.E-mail:shenmx@sany.com.cn.
TH 161
A
1672-5581(2016)06-0487-06
