基于Liu混沌系统生成的多翅膀蝴蝶吸引子
2016-06-20高秉建
高秉建
(武汉理工大学理学院,武汉 430070)
基于Liu混沌系统生成的多翅膀蝴蝶吸引子
高秉建
(武汉理工大学理学院,武汉 430070)

摘要:提出了基于Liu混沌系统生成多翅膀蝴蝶吸引子的新方法。主要的设计思想是增加系统第二类鞍焦点的数目。用多分段二次函数作代换,设计了改进的混沌系统,获得多个第二类鞍焦点,从而生成多翅膀蝴蝶吸引子。理论分析表明每一个第二类平衡点与蝴蝶吸引子的翅膀相对应。数值仿真证实提出的方法的可行性和有效性。
关键词:多翅膀蝴蝶吸引子;Lorenz系统族;Liu混沌系统;多分段二次函数
0引言
自从1963年Lorenz[1]发现了第一个混沌系统以来,混沌在许多领域得到了深入的研究,包括数学、物理、生物科学和工程领域。1999年,Chen和Ueta[2]发现了Lorenz系统的对偶系统;2002年Lü和Chen[3]发现了Lorenz系统与Chen系统之间的临界系统,随后在Lorenz系统族的统一框架下一些类似系统相继出现,如2004年Liu等[4]提出的新混沌系统,并随后成功实现电路设计[5-6]。一方面,在1984年,Chua等[7-8]提出了第一个混沌电路,建立了混沌理论与非线性电路间的联系。作为Chua双卷吸引子的自然推广,Suykens等[9-11]设计了一维多涡卷混沌吸引子并实现了模拟电路。另一方面,在1993年,Miranda和Stone[12]首次提出了Proto-Lorenz系统,可观察到辐射状的多涡卷吸引子。2006年,Yu等[13]进一步推广到Lorenz系统族产生多涡卷吸引子,随后Lü和Chen[14]总结了改进的Lorenz系统族获得多涡卷吸引子的理论、方法和应用。近年来,基于混沌系统产生多翅膀蝴蝶吸引子成为混沌研究新的热点。2008年,Yu等[15]基于简约的Lorenz系统,用锯齿波函数作代换,生成了多翅膀蝴蝶吸引子。2010年,基于类Lorenz系统的改进设计出多翅膀蝴蝶吸引子[16]。这让人们想到,与Lorenz系统有不同特性的Liu系统,是否也能生成多翅膀蝴蝶吸引子?答案是肯定的。
本文提出了基于Liu系统生成多翅膀吸引子的新方法,用多分段二次函数作代换,设计了改进的Liu系统。主要的设计思想是增加系统第二类鞍焦点,使它们对应的翅膀沿某一坐标轴水平方向延伸。理论分析表明每一个第二类鞍焦点与蝴蝶吸引子的翅膀相对应。数值仿真证实了提出的方法的可行性和有效性。
1Liu混沌系统
Liu混沌系统的状态方程:
(1)
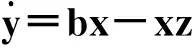
Liu混沌系统的特性:1)系统有两个第2类平衡点,对应于吸引子的双翅膀结构。2)在变换(x,y,z)→(-x,-y,z)下,系统都是不变的,因而吸引子是对称的。3)平衡点的定位与系统的平方项或交叉项紧密相关,由平衡点的平方根项反映出来。4)非线性动力学特性由状态变量的平方项或交叉项控制。
2改进的Liu混沌系统
基于Liu混沌系统的特性,用多分段函数替代系统的平方项或交叉项,很可能改变系统平衡点数目和定位。于是构造多分段函数
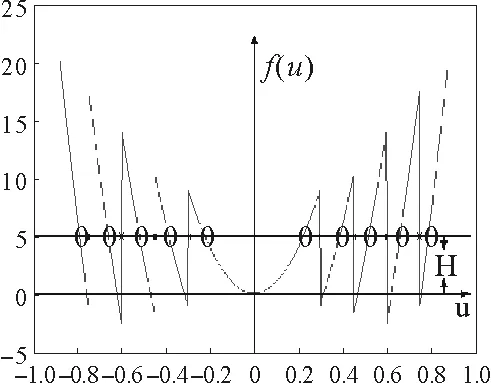
(2)其中,sgn(x)为标准符号函数,N为正整数,A0,Ai为波幅,Ei为分段点,它们满足Ai=f(Ei-0)-f(Ei+0),i=1,2,…,N,宽度wi=Ei+1-Ei,斜率ki=A0(Ei+Ei+1),显然,每个分段的特性,包括斜率和宽度,很容易由A0,Ai和Ei的值调节。若参数取值N=4,A0=100,A1=10,A2=12,A3=16.67,A4=18.75,E1=0.3,E2=0.45,W3=0.6,E4=0.75,则可构造9分段非线性函数f(x),如图2所示。
用(2)中的非线性函数f(x)替代Liu混沌系统中的平方项x2,可设计出多翅膀的Liu系统:

(3)
其中,引进了伸缩因子p,以便能调节吸引子的观察区域,当实际设备的运行区域有限时,也有利于电路实现。
3改进的Liu系统的动力学分析
为了证实新系统的混沌特性,首先研究平衡点的特性。

根据上述参数取值,计算出改进的Liu系统的10个第二类平衡点分别为Q±0(±0.223 6,±0.223 6,8),Q±1(±0.387 3,±0.387 3,8),Q±2(±0.519 6,±0.519 6,8),Q±3(±0.660 8,±0.660 8,8),Q±4(±0.790 1,±0.790 1,8)。
对系统(3)在平衡点处线性化,计算Jacobin矩阵为
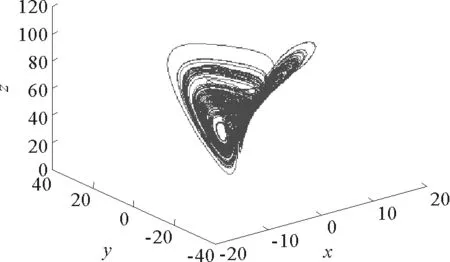
图1 Liu混沌吸引子
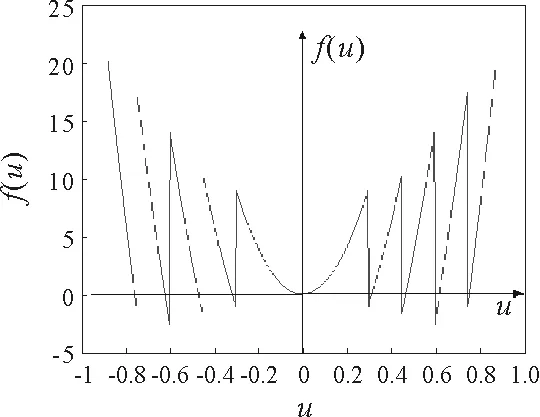
图2 多分段二次函数f(u)
标记‘×’表示第一类平衡点;
当p=0.2时,每一个平衡点对应的特征值为
Q±0:γ±0=-17.561 4,σ±0±jω±0=2.530 7±j10.367 3
Q±1:γ±1=-22.874 3,σ±1±jω±1=5.187 1±j15.342 7
Q±2:γ±2=-26.706 3,σ±2±jω±2=7.103 2±j18.813 4
Q±3:γ±3=-30.481 0,σ±3±jω±3=8.990 5±j22.186 7
Q±4:γ±4=-33.718 9,σ±4±jω±4=10.609 4±j25.058 2
从上面的特征值可知,这些平衡点都是第二类鞍焦点,可生成10翅膀蝴蝶吸引子,每一个第二类鞍焦点与蝴蝶吸引子的翅膀相对应。
当N=4和上面给定的参数(A0,Ai,Ei)的取值,计算出系统最大的Lyapunov指数Lmax=2.034。可以验证,多参数(A0,Ai,Ei)在很大的范围内,系统都存在正的Lyapunov指数,因而改进的Liu系统是混沌的。
4数值仿真
应用科学与工程计算软件Matlab,采用Runge-Kutta四阶算法,取步长0.01,对改进的Liu系统进行仿真。通过调节多分段函数的参数,很容易确定吸引子翅膀的数目和定位。由改进的Liu系统生成的多翅膀蝴蝶吸引子如图4。
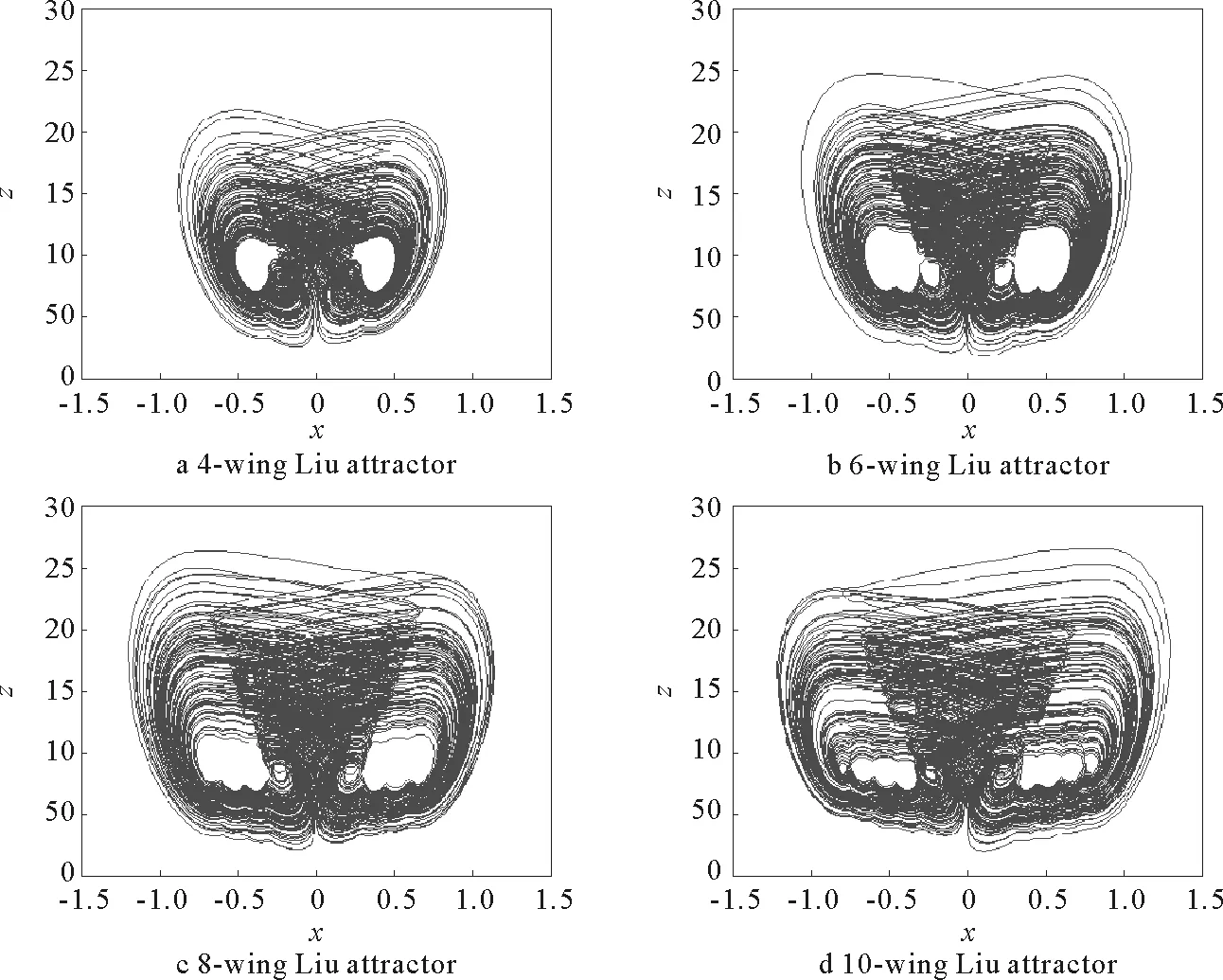
图4 系统生成的多翅膀蝴蝶吸引子
可以观察到,混沌吸引子具有复杂的折叠和拉伸轨线,表明该系统处于混沌状态。
5结语
本文提出了基于Liu混沌系统生成多翅膀蝴蝶吸引子的新方法。用多分段二次函数作代换,设计了改进的混沌系统,获得多个第二类平衡点,从而生成多翅膀蝴蝶吸引子。该方法的优点是,通过调节非线性函数的参数容易确定吸引子翅膀的数目和定位。与环状的多涡卷吸引子相比,改进的混沌系统生成多翅膀蝴蝶吸引子易于构造和电路实现,因而在保密通信、图像加密等领域有着广阔的应用前景。
感谢武汉大学陆君安教授对本论文在构思和仿真过程的指导和支持。
参考文献:
[1]Lorenz E N. Deterministic non-periodic flows [J]. J Atmos Sci, 1963, 20: 130-141.
[2]Chen G R, Ueta T. Yet another chaotic attractor [J]. Int J Bifur Chaos, 1999, 9(7): 1465-1466.
[3]Lü J H, Chen G R. A new chaotic attractor coined [J]. Int J Bifur Chaos, 2002, 12(3): 659-661.
[4]陈关荣,吕金虎. Lorenz系统族的动力学分析、控制与同步[M]. 北京:科学出版社,2003.
[5]Liu C X, Liu T, Liu L, et al. A new chaotic attractor [J]. Chaos, Solitons and Fractals, 2004, 22 (3): 1031-1038.
[6]王发强,刘崇新. Liu混沌系统的混沌分析及电路实验的研究[J]. 物理学报,2006, 55(10): 5061-5069.
Wang Faqiang, Liu Chongxin. Studies on Liu chaotic system and its experimental confirmation[J]. Acta Phys Sin, 2006, 55(10): 5061-5069.
[7] Matsumoto T. A chaotic attractor from Chua’s circuit [J]. IEEE Trans Circ Sym, 1984, 31(12): 1055-1058.
[8]Chua L O, Komuro M, Matsumoto T. The double scroll family [J]. IEEE Trans Circ Sym, 1986, 33(11): 1072-1118.
[9]Suykens J A K, Vandewalle J. Generation of n-double scrolls (n=1; 2; 3; 4…) [J]. IEEE Trans Circ Sym I, 1993, 40 (11): 861-867.
[10] Suykens J A K, Huang A, Chua L O. A family of n-scroll attractors from a generalized Chua’s circuit [J]. Int J Electron Com, 1997,51(3): 131-138.
[11] Yalcin M E, Suykens J A K, Vandewalle J. Experimental confirmation of 3- and 5-scroll attractors from a generalized Chua’s circuit[J]. IEEE Trans Circ Sym I, 2000, 47: 425-429.
[12] Miranda R, Stone E. The proto-Lorenz system [J]. Physics Letters A, 1993, 178:105-113.
[13] Yu S M, Lü J H, Tang K S, et al. A general multi-scroll Lorenz system family and its realization via digital signal processors [J]. Chaos, 2006, 16(3): 033126.
[14] Lü J H, Chen G R. Multi-scroll chaos generation: theories, methods and applications [J]. Int J Bifur Chaos, 2006, 16 (4):775-858.
[15] Yu S M, Tang W K S, Lü J H, et al. Multi-wing butterfly attractors from the modified Lorenz systems[C]∥ Proceedings of the IEEE International Symposium on Circuits and Systems Seattle, USA, 2008: 768-771.
[16] Yu S M, Tang W K S, Lü J H, et al. Generating 2n-wing attractors from Lorenz-like systems [J]. Int J Circ Theor Appl, 2010, 38: 243-258.
[17] 高秉建,陆君安,陈爱敏. 一个unified系统与Rössler系统的组合研究.物理学报, 2006, 55(9): 4450-4455.
Gao Bingjian, Lu Junan, Chen Aimin. A novel chaotic system via combining a unified system with Rössler system[J]. Acta Phys Sin, 2006, 55(9): 4450-4455.
[18] Gao B J,Lu J A. Adaptive synchronization of hyperchaotic Lü system with uncertainty[J]. Chin Phys, 2007, 16(3): 666-670.
(责任编辑耿金花)
Multi-wing Butterfly Attractor from a Modified Chaotic System
GAO Bingjian
(College of Science,Wuhan University of Technology,Wuhan 430070,China)
Abstract:This paper initiates a novel approach to generate multi-wing butterfly attractor from the Liu chaotic system. The main idea is to increase the number of index-2 saddle-focus of chaotic system. By substitution of multi-segment quadratic function, the Liu′s chaotic system is designed to create many index-2 saddle-focus and generate multi-wing butterfly attractor. Theoretical analysis shows that every index-2 equilibrium point corresponds to unique wing in the butterfly attractor. The simulation demostrates the feasibility and effectiveness of the proposed method.
Key words:multi-wing butterfly attractor; Lorenz system family; Liu′s chaotic system; multi-segment quadratic function
文章编号:16723813(2016)01009104;
DOI:10.13306/j.1672-3813.2016.01.009
收稿日期:2015-05-07
基金项目:国家自然科学基金(11172215,81271513 )
作者简介:高秉建(1966-),男,湖北宜昌人,副教授,博士,主要研究方向为非线性系统和网络动力学。
中图分类号:O 545
文献标识码:A
