AGV小车技术及其在汽车制造行业的应用
2016-06-20王军建尚小辉陕西重型汽车有限公司陕西西安710200
王军建,尚小辉(陕西重型汽车有限公司,陕西 西安 710200)
AGV小车技术及其在汽车制造行业的应用
王军建,尚小辉
(陕西重型汽车有限公司,陕西 西安 710200)
摘要:文章介绍了AGV (Automatic Guided Vehicle)小车的优越性及应用前景,从AGV小车的结构、控制方式、驱动形式等方面阐述了AGV的基本原理。最后对AGV目前在汽车制造领域的应用予以了说明。
关键词:AGV;控制器;磁导航;汽车
10.16638/j.cnki.1671-7988.2016.05.033
CLC NO.: U468.8Document Code: BArticle ID: 1671-7988 (2016)05-187-04
前言
随着我国人力成本的不断上升,降低人工成本,提高工厂的自动化程度越来越受各企业的重视。AGV(Automatic Guided Vehicle)小车作为一种自动化智能运载设备,可以减少人工消耗,减轻工人劳工强度,其使用的效果已经得到了普遍认可,已经开始走入“寻常百姓家”。
1、AGV小车的优越性
AGV小车是上个世纪50年代发展起来的智能化搬运运载设备,到了90年代全世界已经拥有的AGV小车已经达到10万台以上,主要集中在欧美、日本等的发达国家。近年来,随着国内生产AGV小车的厂家逐渐增多,技术不断进步,小车制造成本不断降低 ,同时我国制造业人力成本不断上升、劳动力开始出现短缺现象,这些因素共同推动了AGV小车的应用普及。AGV小车作为一种智能运载工具,目前主要有三大优点:1.节省人力。AGV作为一种智能化的运载工具,运行过程无需员工操作,这也是与传统的叉车、电瓶车有本质的区别,劳动力得到了解放。企业的人工成本得到了降低。2.使用成本低。单体小车价格较低,小车的原理简单,容易维护。小车在使用过程中的维护成本较低。3.零排放,没有尾气污染。对很多车间来说,空气质量一直是企业职业健康的重要关注点之一,与物流小车相比,AGV小车没有尾气排放,不会对车间的空气产生污染。

图1
2、AGV小车的基本原理
AGV小车作为一种自动化运载设备,它是以PLC为控制核心、蓄电池为动力、装有非接触导引装置的无人驾驶自动导引运载车,其自动作业的基本功能是导向行驶、认址准停和移交载荷。AGV小车主要是由车载控制系统、导航系统、行走系统和安全与辅助系统、车体、电池系统等组成。其中车载的控制系统、导航系统、行走系统是AGV小车的核心组成,也是各AGV厂家研究的重点。
在AGV小车的结构中, PLC(可编程控制器)是控制的核心单元、障碍物识别传感器为控制系统的外部信号输入源。PLC的主要作用是接收外部的数字量信号输入,将信号进行处理后,输出数字量信号控制电机驱动器,从而控制整个AGV小车的行走。小车车体上应安装有启动、停止、复位、急停等按钮,同时应当有电源指示、运行指示,急停指示、故障指示以及报警提示等。
3、AGV小车的基本结构
基本确定AGV小车的硬件后,硬件的安装布局位置应按紧凑合理,应保持小车的中心在小车结构的中心位置。AGV小车主体结构的布局图如下所示:
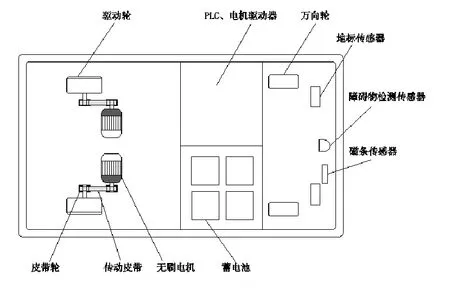
图2 AGV小车主要硬件的布置图
3.1导航系统
导航系统是AGV小车的核心组成之一,是保证AGV小车能否沿正确路径行走的关键。随着技术进步,AGV的导航系统按有无导引路线大致分为三种:一是有固定路线的方式:二是半固定路线的方式,包括标记跟踪方式和磁力制导方式;三是无路线方式,包括地面帮助导航、用地图上的路线指令导航方式和在地图上搜索最短路径制导方式。由于固定线路方式的导航,价格低、功能简单,得到广泛的应用,而半固定路线和地面帮助导航方式在企业应用不多。固定路线的导引方式有磁条导航、光学控制导航、激光导航。
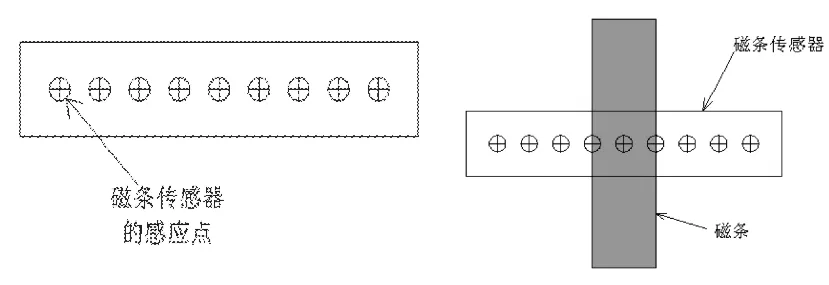
图3
磁条导航在由于价格低,施工简单,在AGV小车领域使用广泛。磁条导航需要使用专用磁条传感器、专用磁条。磁条传感器的结构如下图所示,磁条传感器是内部间隔10mm平均排列16个(型号不同,点数不同)采样点,能够检测磁条上方的磁场,每个采样点都有一路信号对应输出,磁条传感器内部垂直于磁条上方连续采样,每个采样点检测到磁条都会输出信号。磁条传感器应用根据检测到的磁性强度,将模拟量信号转换成布尔数字量量信号,传递给控制器。路径追踪时,控制器根据磁条传感器的输入信号判断AGV小车是否偏离轨道从而进行差速调节保证AGV小车沿着轨道行走。
本文选择的磁条传感器为兴讼CNS-MGS-16-232磁条传感器,这种传感器同时支持I/O传统的接线方式,也支持RS232通信。
3.2行走系统
在国内,AGV制造领域主要采用无刷直流电机作为小车的动力电机。
无刷电机控制的基本原理是PLC输送给无刷电气驱动器以控制指令,无刷电机驱动器按照设定的参数控制电机的启动、停止、调速等。基本过程如下图所示:

图4
本文选用兴讼的无刷电机驱动器CNS-BLD-NC,这个类型的驱动器一台驱动器可以同时驱动两台驱动器。磁条传感器,可以直接与驱动器进行通信。驱动器根据接收的磁条传感器信号,自动判断小车是否偏离了轨道,对AGV后轮的驱动进行差速。兴讼驱动器与电机的连接图如下:
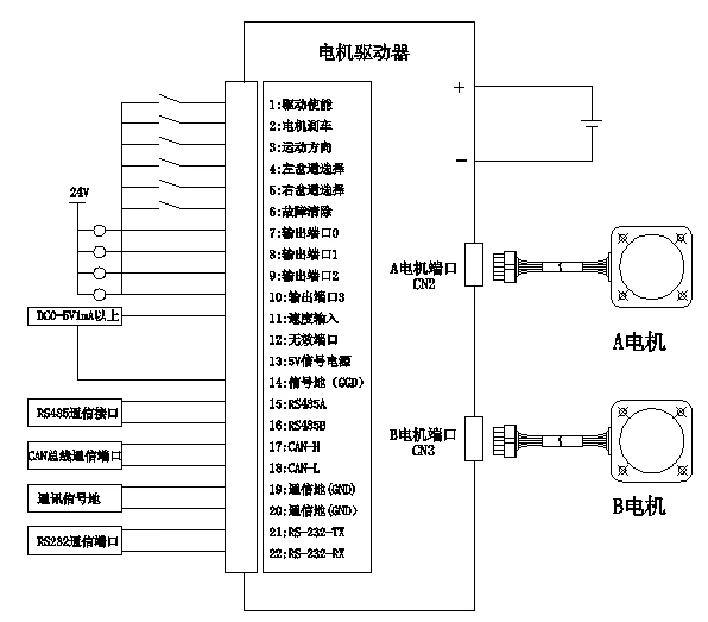
图5
驱动器使用直流24V作为电源。1-10可以与PLC的I/O信号连接,通过0-5V电压调整小车速度。RS232通信端口直接连接磁条传感器。
差速AGV小车的转向主要是电机差速来实现的,如图所时,小车左轮的速度为V1,小车右轮的速度为V2。
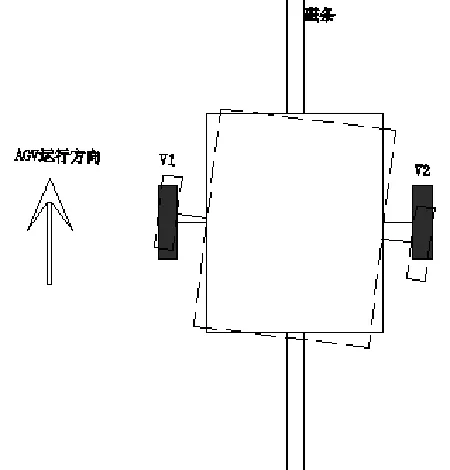
图6
AGV小车路径追踪时:当AGV小车开始运行时,小车前面的障碍物检测传感器没有检测到障碍物时,AGV小车开始追踪。
当传感器检测到小车向左偏离时,控制器驱动电机进行调速V1>V2;传感器检测到小车沿着轨道运行无偏差时,V1=V2;传感器检测到小车向右偏离时,V1 3.3小车认址信号 小车认址也分为两种形式,一种形式只是简单的信号确认,第二种是可以确定小车的具体位置。目前在简单的AGV系统中,第一种方式应用普遍。磁条的磁性分为N极性磁条和S性极性磁条,相应的传感器也分为N极性和S极性传感器。 在AGV小车行走过程中可以选择N极性磁条和N极性传感器分为作为AGV小车的路径轨道和认址地址。在小车车体上安装与认址磁条相对应的传感器,小车行走到认址位置时,小车可以根据程序选择停止、加速、减速等。 图7 小车的轨道是特制磁条铺设而成,磁条宽度约为50mm。 小车的轨道布置是小车能够实现功能,按照预期运行关键因素之一,应当合理布置小车的运行路径。 小车的运行轨道如图所示,小车的轨道应避免直角,拐弯处应采用圆弧形状。在轨道的两侧可以布置地标,小车行走至地标时,停止行走,小车人工复位后,小车恢复行走。轨道两侧的地标,是设置小车停车点的关键。 AGV小车的控制控制面板及PLC的输入、输出分配。 本文中AGV使用三菱FX-3U PLC作为控制器,其输入、输出的I/O点分配如下图所示: 表1 小车行走的基本流程图 图8 根据流程图,编写PLC控制程序。小车启动后,检测到小车障碍物检测传感器检测(X10)检测到小车前方无障碍物,同时小车的电机驱动器输出 (X11、X12、X13、X14)判定小车没有脱轨后,小车正常启动运行。 小车启动后,PLC的DA模拟量模块输出0-5V的电压,通过控制驱动器控制小车的行走。 AGV小车在工厂自动化领域的应用,目前主要集中在两个方面,一是物料的转运配送、二是辅助装配。 物料的转运配送是AGV小车最常见的应用方式。这类AGV小车结构本简单,造价低,通常只有前进一个动作,可以进行圆弧旋转。目前,这类AGV小车主要从事两类工作场景,一类是大批量零部件的配送,小车一次托运多个料框,料框内装安顺序装好各类零件,直接配送至装配现场。小车到达指定地点是自动将料框放下。其次就是大型零部件的转运,小车车体上制作工装,零部件直接放置在小车车体上实现转运。另一类应用,主要就是辅助装配。在汽车装配过程,具有举升功能的AGV小车可以方便汽车地盘下面零部件的安装。随着技术的进步,AGV小车逐渐增加了新的功能,对汽车制造领域产生更深远的影响。 AGV小车在国内制造业,尤其是汽车行业、物流业应用非常普遍,其优越性得到了普遍认可。随着中国人力成本的上升,AGV小车技术的应用必将越来越广泛,有能力自主制造AGV小车的厂家越来越多,AGV小车制造行业也必将取得质的的飞跃。 参考文献 [1]潘运平,鲁峰,王飞等,工厂AGV的结构设计与控制研究[M]:现代制造工艺装备,2014年第5期. [2]王永鼎,杨家朋.RFID和AGV集成系统及其在配送中心的应用,计算机系统应用,2011年第11期. [3]杨松华,物流搬运.AGV的轨迹跟踪与控制,控制与检测,2008. [4]李书远,浅谈自动导向运输小车系统(AGV),信息科技、机械与电子.2010. AGV technology and its application in automobile manufacturing industry Wang Junjian, Shang Xiaohui Abstract:This article introduces the AGV superiority and application prospect, from the structure of AGV, control mode, drive from aspects this paper expounds the basic principle of AGV. Finally,AGV is explained in the application of steam east manufacturing. Keywords:automated guided vehicle(AGV); controller; magnetic navigation; automobile 中图分类号:U468.8 文献标识码:B文章编码:1671-7988 (2016)05-187-04 作者简介:王军建,就职于陕西重型汽车有限公司。
4、小车的轨道布置
5、小车的PLC程序
6、AGV小车的主要应用
7、结束语
( Shaanxi Heavy Duty Automobile Co. Ltd, Shanaxi Xi’an 710200 )
