电动汽车防抱死制动系统的研究
2016-06-20李倩敏国家知识产权局专利局专利审查协作广东中心广东广州510000
李倩敏(国家知识产权局专利局专利审查协作广东中心,广东 广州 510000)
电动汽车防抱死制动系统的研究
李倩敏
(国家知识产权局专利局专利审查协作广东中心,广东 广州 510000)
摘要:以纯电动车为研究对象,建立了车辆模型。在考虑汽车行驶安全性的基础上,以车轮滑移率为控制目标,分别进行了液压ABS制动和电机防抱死制动的研究,设计了液压ABS控制策略和电机防抱死控制策略,并进行了仿真实验,实验结果表明提出的控制策略能有效提高电动汽车的制动安全性。
关键词:ABS;控制策略;滑移率;安全性
10.16638/j.cnki.1671-7988.2016.05.033
CLC NO.: U469.7Document Code: AArticle ID: 1671-7988 (2016)05-140-04
引言
由于能源危机和环境污染等问题,世界各国目前对电动汽车给予了前所未有的关注[1]。电动汽车在减速或制动时,控制电机可以实现制动能量的再生利用。与此同时,发电过程中产生的电机制动力矩又可通过传动系统对驱动轮施加制动,产生制动力。在城市工况中,汽车需要较频繁的启动与制动,不管是采用哪种制动方式,一旦车轮抱死,后果可想而知,因此对于汽车行驶安全性能的要求越来越高。汽车制动防抱死系统(ABS)就是在这种要求下产生和发展的。防抱死制动系统防止车轮完全抱死,避免车轮侧滑和前轮丧失转向能力,提高汽车在制动过程中的方向稳定性和转向操纵能力,缩短制动距离[2]。本文以纯电动汽车为例,主要研究液压ABS制动和电机防抱死制动两种工况。
1、系统构成
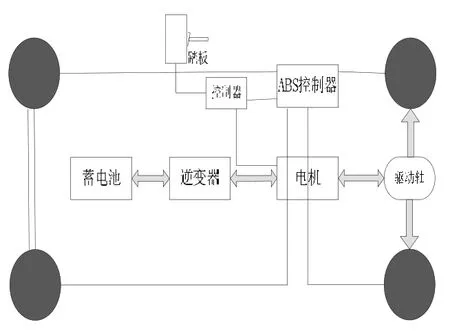
图1 电动汽车再生制动系统结构图
以后轮驱动纯电动车为例,研究电动汽车防抱死系统(见图1)。电动汽车再生制动系统主要由液压ABS、制动踏板、电机传动系统及其控制单元、电池及其控制单元和协调控制器等组成。
本文以踏板加速度来确定制动强度的值,根据踏板行程来确定制动的方式,能比较准确的进行再生制动的控制。
2、液压ABS制动系统的数学模型
假设车身左右对称,忽略空气阻力,车轮滚动阻力,并将簧上质量和簧下质量合为车辆整车质量,四轮车辆模型如图2所示。
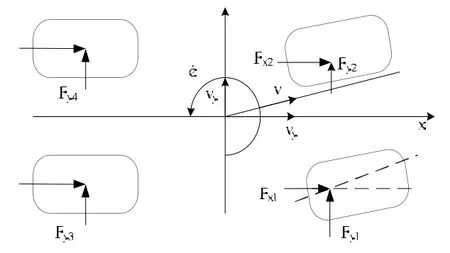
图2 四轮车辆模型
车辆在纵向的受力

车辆在横向的受力

车辆绕Z轴的摆动

四个车轮对地面的正压力:
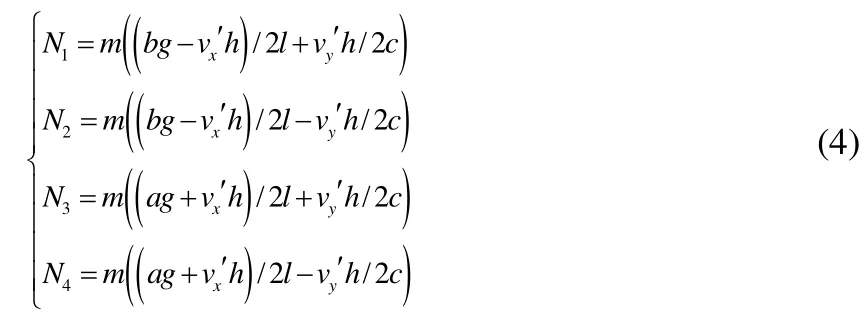
式中,m为整车质量,vx为车辆纵向运动速度,vy为车辆横向运动速度,φ为车辆横摆角速度,l为车辆轴距,c为车辆轮距,a和b分别为前轴和后轴到车辆质心的距离,Ni为车轮对地面的法向反力。
将主缸与轮缸中的液压分别Pm、Pw记作增压时,进液阀打开,出液阀关闭,制动液由高压储能器流向个轮缸;减压时,进液阀关闭,出液阀打开,制动液经过出液阀又轮缸流向储液器。根据液压缸内压力与压力变化率的关系,可得轮缸增减压系统模型如下:

式中C为由阀口形状、液体流态、油液性质等因素决定的流量系数,AT为阀口的流通截面积;φ为阀口形状决定的节流阀指数,其值在0.5~1.0之间;、为常闭阀的相应参数。
滑移率公式:

国内外一些文献[2,4]提到在汽车的制动过程中把滑移率控制在15%~30%之间,此时具有较大的纵向和侧向附着系数。

表1 仿真车辆参数
3、电机防抱死制动系统的数学模型
以汽车中某一个轮子为研究对象,忽略空气阻力和车轮的滚动阻力,建立单轮制动力学模型如图3所示:

图3 汽车单轮制动力学模型

式中,I为车轮转动惯量,Tb为再生制动力矩,Fs为车轮摩擦力,r为车轮滚动半径,ω为车轮转动角速度,N为车轮对地面的法向反力,μ为车轮与地面间附着系数。
假设永磁无刷直流电动机工作在三相全桥驱动,两两导通的工作方式。电机定子绕组为Y连接,3个霍尔元件在空间相隔120°对称放置。
(1)忽略磁路饱和,不计涡流损耗和磁滞损耗;
(2)不计电枢反应,气隙磁场分布近似为平定宽度为120°电角度的梯形波;
(3)忽略齿槽效应,三相绕组完全对称,连续均匀分布于电枢表面;
永磁无刷直流电机的电压平衡方程为[5]:

R为定子每相绕组相电阻(Ω);
LS为定子绕组自感(H);
为定子每相绕组相反电动势(V);
P为微分算子(p=d / dt);
电磁转矩方程为:

式中:Te为电磁转矩(N·m);
ωm为电动机转子机械角速(rad/s);机械运动方程为:

式中:TL为负载转矩
ωm为电动机转动惯量(kg·m2);
电机的仿真参数:
额定功率为500W,额定转矩为2.5Nm,额定转速N为1000rpm,每相绕组电感L为8Mh,每相绕组相电阻R为2.8Ω,转动惯量J为,极对数p为2。
4、液压ABS制动
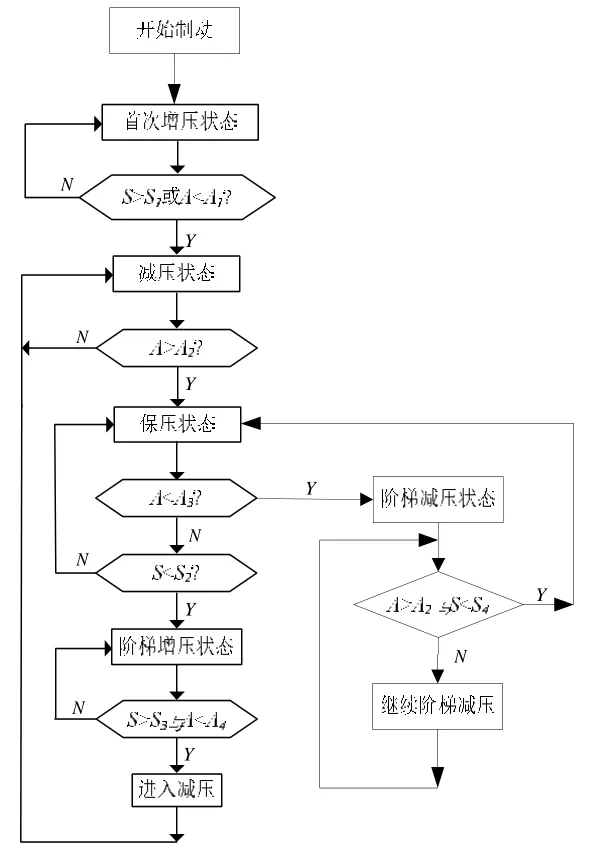
图4 液压ABS控制流程图
当电动汽车遇突发事件需要进行紧急制动时,此时驾驶员猛的踩下制动踏板,为了行车的安全,采用液压ABS进行制动。在制动的过程中为了防止车轮发生抱死产生滑移并发生侧滑,控制车辆运行在最佳状态,控制过程中一般把滑移率控制在20%左右。
根据制动压力、车轮速度和地面附着力的关系,将每个ABS控制循环分为增、减、保3种状态,并通过制动轮缸分别作用在四个车轮上。控制逻辑如图4所示。

表2 控制参数含义
经过MATLAB/Simulink仿真,图5展示了车辆处于高附着路面时四个车轮制动时滑移率的变化趋势。可以看出,制动初期车速较高时滑移率变化曲线在15%~30%左右,即控制在最佳滑移率控制点附近,符合控制的要求:
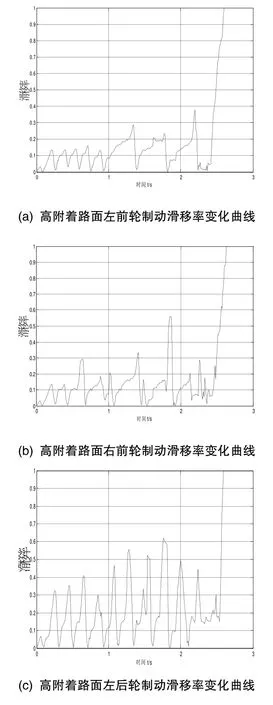
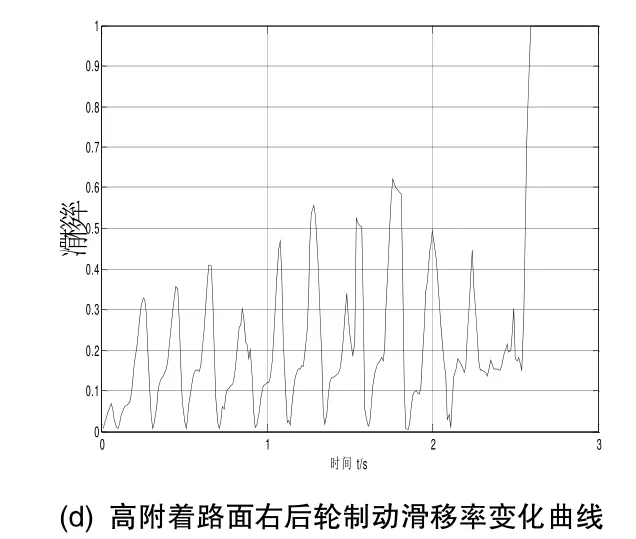
图5 四个车轮滑移率曲线
5、电机防抱死制动
本文选用永磁无刷直流电机作为驱动电机进行仿真实验。电机的输出转矩与电机的绕组电流成正比,所以通过对电机的回馈电流进行调控便可以改变电机的输出转矩。采用PWM(脉宽调制)对电流进行调控,电机回馈电流的大小有PWM占空比α决定,因此利用电动车控制器控制α的大小就可以实现“电制动”的目的,将车辆制动滑移率控制在30%以内。
当车轮将要抱死时,电动车电机PWM占空比α开始减小,电机绕组反向电流增加,制动转矩增大,电机转速下降。电动车控制器通过对前轮和后轮转速的比较得出制动滑移率S,如果车轮的滑移率大于30%,说明车轮已经进入不稳定区域,便进入电机转矩减小阶段。这时α增大,使得S减小,当S小于10%时进入到下一个循环。控制逻辑如图6所示,其中S2代表减压的门限值,S1代表增压的门限值:
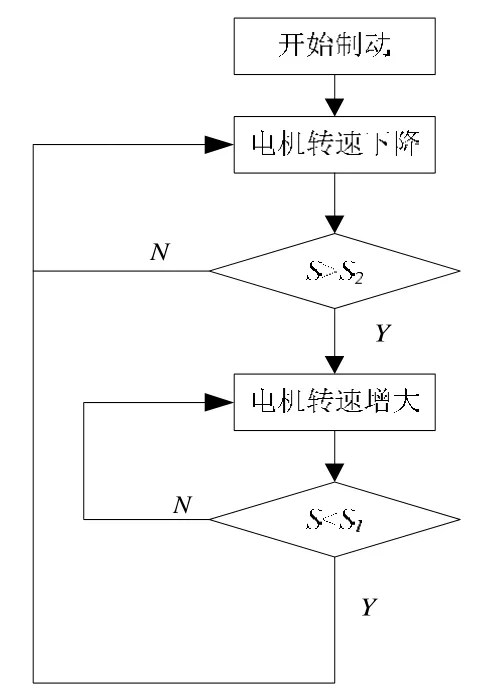
图6 电机防抱死控制流程图
根据建立的数学模型,利用MATLAB/Simulink建模仿真,从图7可以看出设计的控制策略可行,控制效果良好,滑移率基本控制在10%~30%左右,即控制在最佳滑移率控制点附近,车轮无抱死现象。

图7 车轮滑移率曲线
6、结论
仿真结果表明,在高附着系数路面上,采用防抱死控制方法可以使车辆制动滑移率控制在10%~30%之间,避免了车轮抱死,增加了车辆行驶的安全性,达到了预期的效果。另外对于电动汽车在制动过程中怎样协调液压ABS与电机防抱死制动的问题,今后需要进一步研究。
参考文献
[1]Mutoh N.Yahagi H.Control Methods Suitable for Electric Vehicles with Independently Driven Front and Rear Wheel Structures[C]. Vehicle Power and Propulsion,2005 IEEE Conference,7-9Sept.2005: 638-645.
[2]程军.汽车防抱死制动系统的理论与实践[M].北京理工大学出版社1999.9.P80-83.
[3]李国斐,林逸,何洪文.电动汽车再生制动控制策略研究[J].北京理工大学学报.2009(06).
[4]LV H Q, JIA Y M, Du Jun-ping, et al. ABS Composite Control Based On Optimal Slip Ratio[J], Proceedings of the 2007 American Control Conference Marriott Marquis Hotel at Times Square, New York City, USA, July 11-13, 2007 Page(s):5748~5752.
[5]王兴华,励庆孚,王曙鸿.永磁无刷直流电机空载气隙磁场和绕组反电势的解析计算[J].中国电机工程学报.2003,23(3):126—130.
Study on Anti-Lock Braking System of Electric Vehicles
LI Qianmin
( Patent examination cooperation center of the patent office, Sipo, Guangdong Gangzhou 510000 )
Abstract:Treating the Purely electric vehicles as research object, the vehicle model is established. Considering the driving safety of cars, the hydraulic ABS (Anti-lock Braking System) and motor ABS are both researched, which regard the slip ratio of wheels as the control target. Then a control strategy of hydraulic ABS and motor ABS are designed, with making a simulation experiment, the result shows that the proposed control strategy can effectively improve braking stability of the electric cars.
Keywords:ABS; control strategy; slip ratio; safety
中图分类号:U469.7
文献标识码:A
文章编号:1671-7988(2016)05-140-04
作者简介:李倩敏,就职于国家知识产权局专利局专利审查协作广东中心。
