一种全速型自适应巡航系统状态的转换机制
2016-06-20张宏冯兴龙华晨汽车工程研究院辽宁沈阳110141
张宏,冯兴龙(华晨汽车工程研究院,辽宁 沈阳 110141)
一种全速型自适应巡航系统状态的转换机制
张宏,冯兴龙
(华晨汽车工程研究院,辽宁 沈阳 110141)
摘要:自适应巡航控制系统(ACC:Adaptive Cruise Control System)属主动安全技术,是在传统巡航控制基础上,根据本车与前车或障碍物之间的相对距离,自动施加驱动或制动控制来保持合适的安全间距;全速型ACC系统走停功能是在基础型自适应巡航控制的基础上,通过控制汽车的制动和驱动,实现汽车的起步和停车的自动控制。文章提出一种全速型ACC系统的控制逻辑方案,试验结果表明,所设计的方案可明显改善ACC系统的性能,同时提升驾驶安全性和舒适性。
关键词:全速型ACC;控制逻辑;启停功能
10.16638/j.cnki.1671-7988.2016.05.033
CLC NO.: U463.61Document Code: BArticle ID: 1671-7988 (2016)05-130-04
简介
描述:ACC(自适应巡航)状态机是ACC系统的核心,与整车其它控制系统密切关联。状态机检测其它系统的工作状态,并根据驾驶员的操作完成初始化、关闭、未激活、激活和故障模式的切换,最终将计算结果发送到各执行单元,实现对车辆加减速控制。
1、ACC系统主状态(ACC Main Mode)
ACC主状态由初始化、关闭、激活、未激活、故障五个模式组成,之间的关系如图1所示:
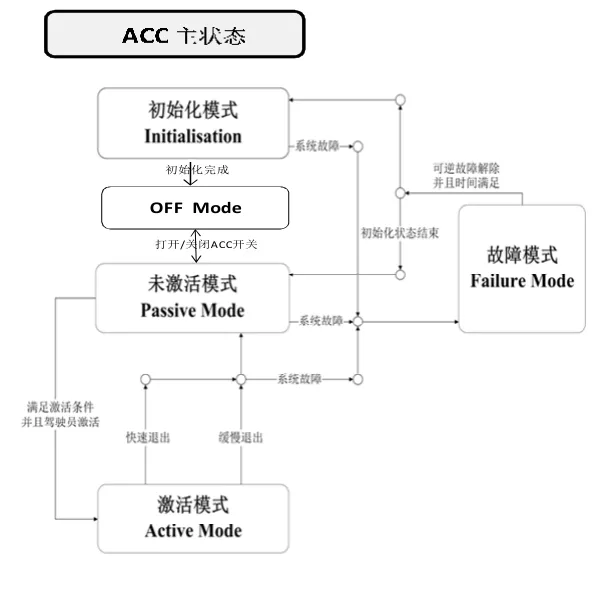
图1 ACC主状态
1.1初始化模式(Initializaton Mode)
初始化模式为ACC功能运行前期自身检测是否满足功能正常激活条件。初始化时间不能超过一定时间(如200ms),初始化过程中系统信号发送默认值,初始化完成后系统信号发送默认值。
进入条件:点火开关调至ON档,ACC雷达上电。
退出条件:(1)初始化完成后,未检测到系统故障,进入关闭模式。
(2)检测到系统故障,进入故障模式。
1.2关闭模式(Off Mode)
关闭模式为当前功能关闭,操作开关后进入关闭时间不大于200ms。关闭状态过程中系统信号发送计算值,关闭状态完成后系统信号发送默认。
进入条件:
(1)点火开关调至ON档,ACC主开关关闭,系统会从未激活模式、激活模式退出到关闭模式。
退出条件:
(1)其它ACC主开关开启,系统从关闭模式进入未激活模式。
(2)检测到系统故障,进入故障模式。
1.3未激活模式(Passive Mode)
未激活模式为当前状态不满足激活条件,此时驾驶员操纵开关,ACC功能无法激活。
进入条件:
(1)系统处于关闭模式,ACC雷达上电后完成初始化过程,将ACC主开关打开。
(2)系统由激活模式/未激活模式转为故障模式,可逆故障解除或系统处于可逆故障模式的时间超过3s。
(3)系统处于激活模式,满足快速退出条件或者缓慢退出条件。
退出条件:
(1)ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)激活抑制条件不满足,驾驶员按SET或者Resume(已经设定过车速)激活ACC,系统进入激活模式。
1.4激活模式(Active Mode)
激活模式表示为当前功能已经激活,正在控制运行。进入条件:
(1)系统处于未激活模式,激活抑制条件不满足,驾驶员按SET或者Resume(已经设定过车速)激活ACC。
退出条件:
(1)将ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)满足快速退出条件或者缓慢退出条件。
(4)系统退出到未激活模式。
1.5故障模式(Failure Mode)
当系统故障模式由可逆故障模式和不可逆故障模式组成,之间的关系如图2所示
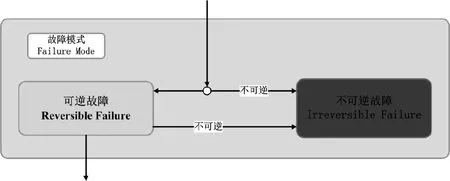
图2 故障模式
1.5.1可逆故障(Reversible)
可逆故障是当检测到故障条件不再满足时,可以自行恢复的故障,例如timeout或busoff。不需要重新点火也能恢复。但是如果故障条件一直存在,则即使重新点火也不能恢复。暂定为:通讯故障;
主要涉及ACC自身监测信号Timeout、checksum、雷达为校准等校验模块方面原因出现问题导致功能无法实现,在单个点火周期故障消除,系统能够自动恢复。
进入条件:
(1)进入故障模式后,系统自动判断如果为可逆故障,系统进入可逆故障模式。
退出条件:
(1)进入可逆故障模式后,系统再次判断。
如果为不可逆故障,系统进入不可逆故障模式;
如果可逆故障解除,系统进入初始化或者未激活模式。
1.5.2不可逆故障(Irreversible)
不可逆故障的定义是不能在一个点火循环内自动恢复的故障,可以通过尝试重启车辆(=重启系统)来恢复的故障;但是如果仍有故障条件,则继续停留在故障模式。暂定为:软硬件故障。
主要涉及ACC自身软硬件模块方面以及在同一个点火周期故障无法消除,系统不能自动恢复。
进入条件:
(1)进入故障模式后,系统自动判断如果为不可逆故障,系统进入不可逆故障模式。
(2)进入可逆故障模式后,系统再次判断,如果为不可逆故障,系统进入不可逆故障模式。
2、ACC系统子状态(ACC Specific State)
ACC系统子状态激活模式包含多个转换状态,如走停模式、超越模式等,之间的关系如图3所示:
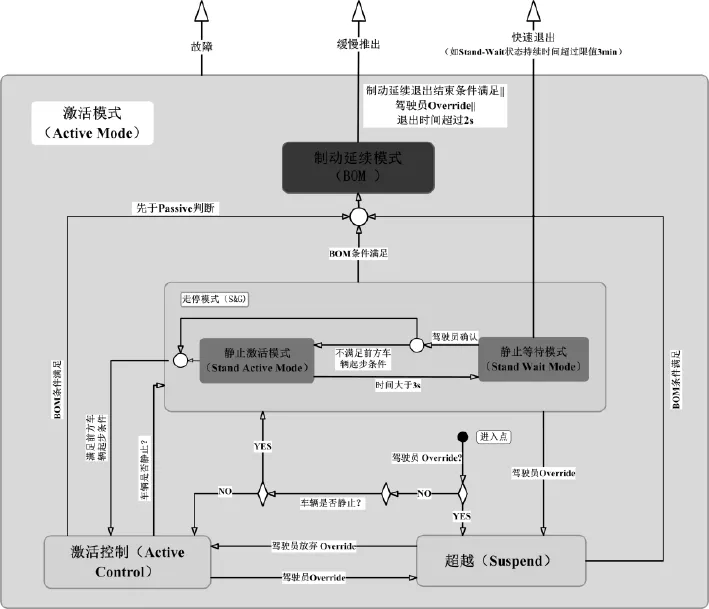
图3 激活模式
2.1激活控制模式(Active Control Mode)
ACC控制车辆定速行驶或跟随前方车辆行驶,此时驾驶员不用踩踏油门踏板,不用踩踏制动踏板控制车辆加减速。
进入条件:
(1)系统进入激活模式后,车辆非静止状态,驾驶员没有踩油门踏板。
(2)系统处于超越模式(60s内,可调),驾驶员松开油门踏板。
(3)系统处于走停模式,前方车辆状况允许起步,驾驶员未踩刹车。
如果系统处于静止激活模式,系统会直接进入激活控制模式。
如果系统处于静止等待模式,需要驾驶员按RES或者轻点油门踏板激活。
退出条件:
(1)将ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)满足快速退出条件或缓慢退出条件,系统退出到未激活模式。
如果满足缓慢退出条件,车辆正在减速,系统先进入制动延续模式再退出到未激活模式。
(4)驾驶员踩踏油门踏板,系统进入超越模式。
(5)车辆跟随目标车停止进入走停模式。
2.2走停模式(Stop&Go)
走停模式由静止激活模式和静止等待模式组成,之间的关系如图4所示:
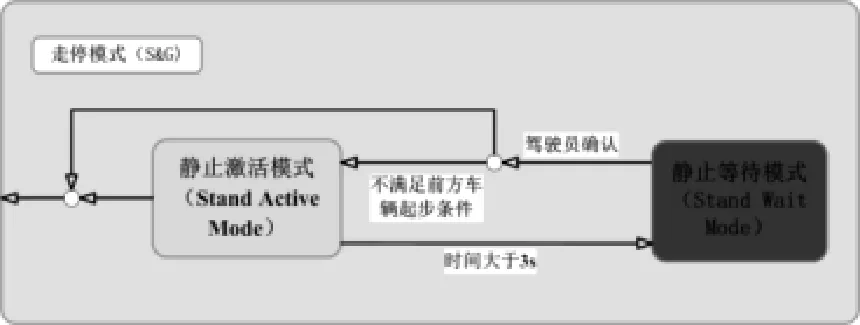
图4 走停模式
车辆跟随前车达到停止状态后, 如果前车在3秒内启动,系统从静止激活模式直接进入激活控制模式,ACC可自动跟随前车起步驶出。当超出该时间后,系统进入静止等待模式,则需要通过驾驶员的确认车辆才可驶出,驾驶员可以通过操纵ACC开关(按下Resume按键)或者踩踏油门踏板来进行,该确认指令在一定时间段内(如3-180s)有效(超出时间段后后EPB接管刹车,系统进入未激活模式)。在这段时间内驾驶员必须注意车辆前方区域的障碍物并且在需要的情况下干预ACC系统,驾驶员尤其要特别注意在ACC车辆正前方或者正在进入该区域的行人。
进入条件:
(1)系统进入激活模式后,驾驶员未踩油门踏板,车辆处于静止状态。
(2)车辆跟随目标车停止,系统进入走停模式。
退出条件:
(1)车辆跟随目标车停止,如果目标车在3秒内启动,系统进入激活控制模式。
(2)车辆跟随目标车停止,如果停止时间超过180秒,系统进入未激活模式。
(3)满足快速退出条件或缓慢退出条件,系统退出到未激活模式。
2.2.1静止激活模式(Stand Active Mode)
跟随前车停止后,在停止后一定时间(如3s)内前车驶离,无需驾驶员操作,在前车驶离后本车自动起步行驶。
进入条件:
(1)车辆跟随目标车停止,停车时间不超过3s。
(2)系统进入静止等待模式后,前车未驶离,驾驶员通过按Resume或者轻点油门唤醒ACC,但不满足起步条件。
退出条件:
(1)将ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)满足快速退出条件或缓慢退出条件,系统退出到未激活模式。
(4)驾驶员踩踏油门踏板,系统进入超越模式。
(5)前方车辆状况允许起步,驾驶员通过按Resume或者轻点油门唤醒ACC,系统进入激活控制模式。
(6)跟停前车后等待时间超过3s前车仍未驶离,系统进入静止等待模式。
2.2.2静止等待模式(Stand Wait Mode)
在此静止过程中,车辆无法自动起步行驶,需驾驶员按Resume或踩踏油门踏板激活ACC功能控制车辆行驶。
进入条件:
(1)系统进入走停模式后,前车未驶离且跟停等待时间超过3s。
(2)车辆跟随目标车停止,驾驶员踩刹车踏板。
退出条件:
(1)将ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)满足快速退出条件或者缓慢退出条件,系统退出到未激活模式。
(4)驾驶员踩踏油门踏板,系统进入超越模式。
(5)驾驶员按Resume或轻点油门,未踩刹车踏板,系统进入静止激活模式,如果前车状态允许起步,则系统进入激活控制模式。
2.3超越模式(Suspend Mode/Override Mode)
ACC控制车辆行驶时,驾驶员通过踩踏油门踏板加速,驾驶员踩加速踏板的扭矩大于ACC需求扭矩时,此时驾驶员接管车辆行驶,当驾驶员接管一段时间(如60s)内松开油门踏板时,ACC接管车辆行驶。
进入条件:
(1)系统进入激活模式后,驾驶员踩油门踏板(Override) 60s内。
退出条件:
(1)其它将ACC主开关关闭,系统进入关闭模式。
(2)检测到系统故障,系统进入故障模式。
(3)满足快速退出条件或缓慢退出条件,系统退出到未激活模式。
(4)驾驶员松开油门踏板,系统进入激活控制模式。
其他:
(1)Override模式其实也可以认为是Active模式的一种,此时雷达发送的相关信号发送计算值。
2.4制动延续模式(Brake Only Mode)
ACC控制车辆行驶减速制动过程中,由于其他原因导致ACC功能退出,ACC需继续发出减速度指令一段时间(如2000ms),且减速度值在此2s内线性递减至零。
进入条件:
(1)系统处于激活控制模式,车辆正减速制动,缓慢退出条件满足。
(2)当车辆处于走停模式,制动延续退出条件满足。
退出条件:
(1)检测到系统不可逆故障条件满足。
(2)车辆达到静止状态。
(3)没有前方目标。
(4)驾驶员有Override行为。
(5)制动延续退出时间超过2s。
3、ACC系统功能退出
ACC系统功能退出分为快速退出和缓慢退出。
3.1快速退出
属于驾驶员主动操作的,目前定义为快速退出,导致ACC功能立即退出(在一个周期内)。具体条件如下:
(1)ACC 主开关关;
(2)ACC取消键按下;
(3)驾驶员踩刹车踏板;
(4)EPB激活;
(5)档位不在前进档;
(6)发动机关闭;
(7)ESP主开关关闭;
(8)制动盘过热;
(9)驾驶员侧门打开;
(10)驾驶员安全带打开;
(11)车辆静止,轮缸压力为零;
(12)近距离跟踪目标丢失;
(13)驾驶员override超过一定时间。
3.2缓慢退出
ACC在控制车辆制动过程中,导致ACC功能在2s内退出。
当前ACC请求的制动信号将延续直至完成,制动延续模式的前提条件是ACC正在控制车辆进行制动。在这种模式下ACC不会在某一确定的时间间隔内退出,而将在制动系统继续完成当前的制动行为后才退出,这种退出方式的目的是为了不使驾驶员感到不舒适。
(1)ESP(VDC) 激活(超过40ms)
(2)HDC激活(超过40ms)
(3)ABS激活(超过40ms)
(4)TCS激活(超过40ms)
(5)MSR激活(超过40ms)
4、总结
本文提出了一种全速型自适应巡航系统控制策略/机制,包括未激活、激活及走停的功能及使能和失效条件,并重点定义激活模式中激活控制、走停控制、超越模式等转换机制,阐明基本走停控制策略,为ACC(STOP&GO)系统的研发奠定了基础。
参考文献
[1]王景武,金立生. 车辆自适应巡航控制系统控制技术的发展[J].汽车技术. 2004 (07).
[2]孙龙林. 先进驾驶辅助系统的发展现状和趋势[J]. 汽车电器. 2009 (07).
[3]卢燕. 城市工况汽车走—停巡航算法的研究[D].吉林.吉林大学. 2007.
[4]ISO 22179: Intelligent transport systems — Full speed range adaptive cruise control (FRSA)systems —Performance require-ments and test procedures location and run-out. 2009.
新能源汽车
A Full Speed Range Adaptive Cruise Control System State Transition Mechanism
Zhang Hong, Feng Xinglong
(Brilliance automotive engineering research institute, Liaoning Shenyang 110141)
Abstract:ACC is one of the active safety technologies, which is an evolution of the cruise control system. Depends on the distance between the host vehicle and the other vehicles or obstacles, the ACC system can automatically apply acceleration or braking as to keep a safe distance. ACC with stop and go function is a further evolution, which can realize full speed range control. An ACC control logic plan is raised in this paper, which can effectively improve the performance of ACC system as well as the driving safety and comfort of the vehicle.
Keywords:Full Speed Range ACC; control logic; Stop and Go
中图分类号:U463.61
文献标识码:B文章编码:1671-7988 (2016)05-130-04
作者简介:张宏,华晨汽车工程研究院。
