一种基于滑动积分的码元同步方法
2016-06-17杜亚琦周建英
杜亚琦,周建英
一种基于滑动积分的码元同步方法
杜亚琦1,2,周建英2
(1.通信信息控制和安全技术重点实验室浙江嘉兴314033;2.中国电子科技集团公司第三十六研究所浙江嘉兴314033)
摘要:传统的早迟积分型码元同步方法,基于锁相环原理,通过比较早迟积分值获取检相误差,进而调整采样时钟,其环路设计比较复杂。本文提出了一种基于滑动积分的码元同步方法,该方法针对码元采样值在一个码元周期内获取连续的滑动积分值序列,通过比较早迟积分值调整最佳积分值位置,进而获取最佳积分值。该方法不需要设计复杂的时钟调整电路,设计简单,易于数字化实现。
关键词:早迟积分;码元同步;滑动积分;锁相环
在数字通信系统中,为了限制被传输数字信号的频谱,需要对数字信号进行成型滤波后,再对载波进行调制,以实现信号的带限传输,接收端经过相干解调、采样判决后恢复出发射端的数字信号。由于信道传输延时以及收发两端时钟偏移,接收端采样判决无法在最佳时刻进行,码元同步就是用来调整接收端的采样时钟与发送端时钟同步的一种同步措施。
相对于非线性变换滤波法,通过比较本地时钟与接收数据码元,使本地时钟与接收数据码元同步的绝对值型超前-迟后积分同步环法应用最为广泛。传统的超前-迟后积分同步环法,通过比较超前、迟后积分值的绝对值取得检相误差,经环路滤波后调整压控振荡器(VCO)产生超前和迟后采样时钟。其不仅需要两路积分器,还需要设计复杂的VCO电路,设计实现困难,资源消耗较大。文献[4]给出了一种传统的数字锁相环位同步器及其FPGA实现,文献[5]、文献[6]给出了两种基于传统的锁相环位同步方法的改进设计,提高了锁相环路的收敛速度。但上述锁相环位同步方法计算过程相对复杂,不易实现。
1 早迟积分型锁相环同步法
早迟积分型锁相环同步法结构框图如图1所示,主要包括:积分单元、采样单元、时钟单元、鉴相器和环路滤波器。基带信号同时送入两路积分单元,在采样单元内根据时钟单元提供的超前采样时钟和迟后采样时钟对积分单元输出采样,取采样后积分值的绝对值,经鉴相器、环路滤波器完成对采样时钟调整。
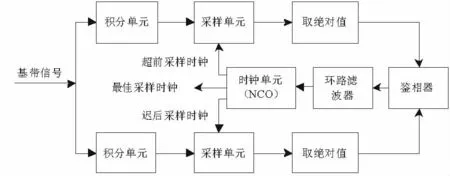
图1 早迟积分型同步法结构框图
早迟积分型同步法工作波形示意图如图2所示。在一个码元周期内对分别获取超前积分值序列A和迟后积分值序列B,通过比较对应的A和B的值获取检相误差,进而调整采样时钟单元(NCO),直至检相误差落在规定的误差范围内。
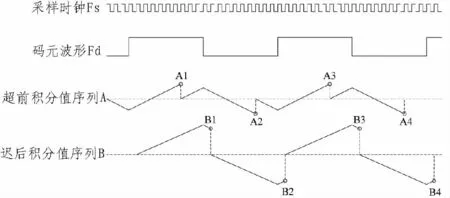
图2 早迟积分型同步法工作波形示意图
2 基于滑动积分的早迟积分型同步方法
基于滑动积分的早迟积分型同步方法结构如图3所示。其主要由采样量化模块1、滑动积分模块2、积分锁存模块3、环路滤波模块4、锁存周期调整模块5组成。其中,采样量化模块1,根据本地参考时钟对码元信号波形进行采样并量化,从而获取码元数据,本实施例中采样频率为Fs,则相应的采样周期t=1/Fs,码元信号的波特率为Fd。
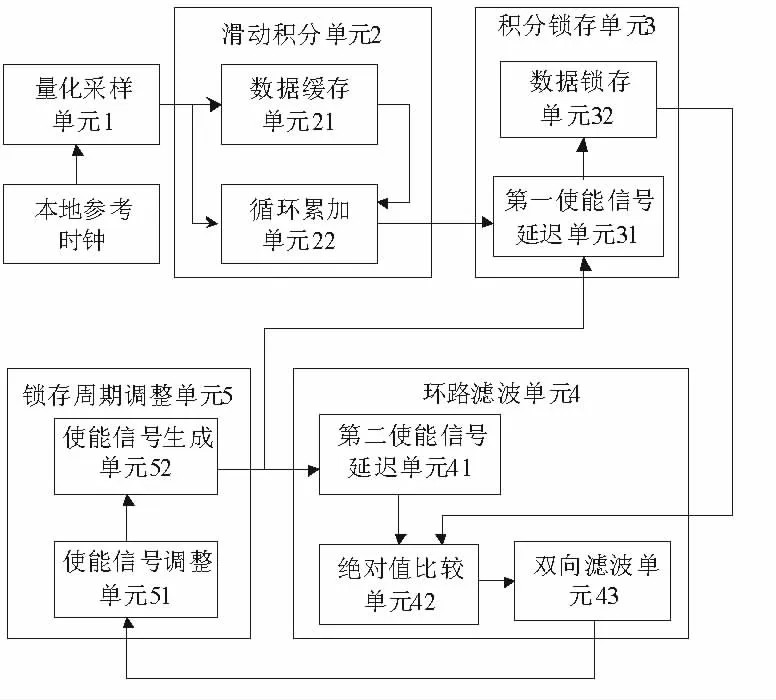
图3 基于滑动积分的早迟积分型同步法结构框图
2.1滑动积分模块
滑动积分模块2,包括数据缓存单元21和循环累加单元22。与采样量化单元1相连接,用于对码元数据实现滑动积分处理,从而获取码元数据的滑动积分数据序列。滑动积分单元结构框图如图4所示。
其中,数据缓存单元21,与采样量化模块1相连接,用于存储当码元信号量化后的码元数据。数据缓存单元21为一个FIFO,该FIFO的深度为k,其中k=Fs/Fd。则FIFO中仅能存储k个数据,FIFO根据其先进先出原则存储最新的k个采样点获取的码元数据,而将当前采样点前的第k个采样点对应的数据输出到循环累加单元22。
循环累加单元22,分别与采样量化模块1和数据缓存单元21相连接,用于做k个采样点对应的码元数据的滑动积分。
2.2积分锁存模块设计
积分锁存模块3,与滑动积分模块2相连接,根据使能信号用于存储码元数据的超前积分值、最佳积分值和迟后积分值。该积分锁存模块3包括第一使能信号延迟单元31和数据锁存单元32。
其中,第一使能信号延迟单元31,与所述锁存周期调整模块5相连接,将锁存周期调整模块5获取的使能信号作为超前积分值使能信号,同时根据使能信号获取最佳积分值使能信号和迟后积分值使能信号;文中根据使能信号延时k/4个采样周期获取最佳积分值使能信号,延时k/2个采样周期得到迟后积分值使能信号。
数据锁存单元32,分别与循环累加单元22和和第一使能信号延迟单元31相连接,获取与循环累加单元22中传送的码元数据滑动积分序列,并根据自第一使能信号延迟单元31中获取的超前积分值使能信号锁存超前积分值,获取的最佳积分值使能信号锁存最佳积分值,获取的迟后积分值使能信号锁存迟后积分值。
2.3环路滤波模块
环路滤波模块4,与所述积分锁存模块3相连接,用于对超前积分值和迟后积分值进行比较运算,并调整双向滤单元波参数。该环路滤波模块4包括绝对值比较单元42、第二使能信号延迟单元41和双向滤波单元43。
其中,绝对值比较单元42,与数据锁存单元32相连接,用于比较超前积分值绝对值和迟后积分值绝对值的大小。第二使能信号延迟单元41,分别与所述绝对值比较单元42和所述锁存周期调整模块5相连接,根据锁存周期调整模块5输出的使能信号获取绝对值比较单元42的数据有效使能信号。双向滤波单元43,与绝对值比较单元42相连接,根据绝对值比较单元42的比较结果调整双向滤波器单元参数。
本文中,双向滤波单元43中输出的双向滤波单元43参数N作为使能信号中的采样时间位置指针参数,用于指示计算超前积分值相对应的采样时间位置。同时,根据双向滤波单元43中输出的双向滤波单元43参数N调整使能信号的周期,从而形成使能信号的周期参数L,最终在使能信号生成单元52中生成一个具有位置信息N和周期信息L的使能信号。该使能信号在本实施例中作为超前积分值使能信号。其中N=[N0,N1,…,Ni,Nt+1,…],i为自然数,Ni表示第i个完整的码元信号对应的滑动积分序列中的采样时间位置指针参数
2.4锁存周期调整模块设计
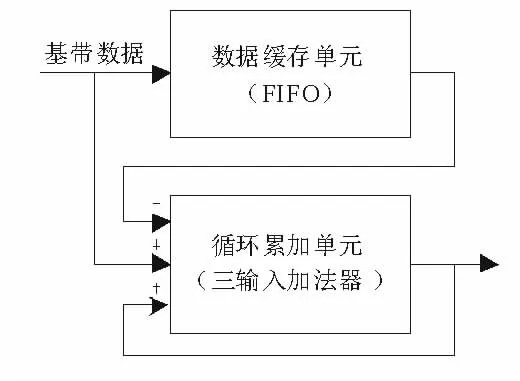
图4 滑动积分单元结构框图
锁存周期调整模块5,分别与积分锁存模块3和环路滤波模块4相连接,根据调整数据调整积分锁存模块3的使能信号。该锁存周期调整模块5包括使能信号调整单元51和使能信号生成单元52。
其中,使能信号调整单元51,与双向滤波单元43相连接,根据双向滤波器单元参数调整使能信号周期。使能信号生成单元52,分别与使能信号调整单元51、第一使能信号延迟单元31、第二使能信号延迟单元41相连接,根据使能信号调整单元51调整后的使能信号周期,生成使能信号。
基于滑动积分的早迟积分型同步方法波形示意图如图5所示。
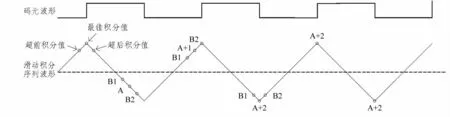
图5 码元数据滑动积分波形示意图
3 基于滑动积分的早迟积分型同步方法实现
基于滑动积分的早迟积分型同步方法工作流程如图6所示。
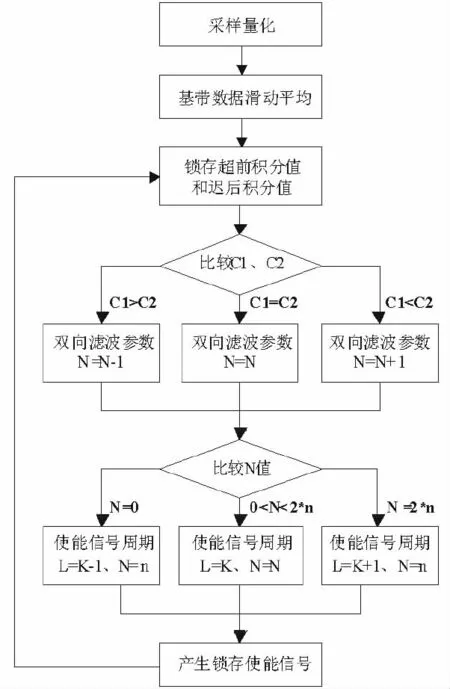
图6 基于滑动积分的码元同步方法工作流程
1)先对码元数据量化采样值求取滑动积分值。
2)经根据使能信号,在积分锁存模块3中获取超前积分值、最佳积分值和迟后积分值;
对于初始状态而言,自获取超前积分值后延时k/4个采样周期计算获取最佳积分值,即自采样开始,3k/8个采样周期内计算的积分值作为最佳积分值;自获取超前积分值后延时k/2个采样周期计算获取迟后积分值,即自采样开始,5k/8个采样周期内计算的积分值作为最佳积分值。
3)根据第二使能信号延迟单元41中输出的数据有效使能信号,在绝对值比较单元42中分别对数据锁存单元32中输出的超前积分值和延后积分值进行绝对值运算,从而获取超前积分值绝对值C1和迟后积分值绝对值C2,并比较C1 和C2的大小。
如果超前积分值绝对值C1等于迟后积分值绝对值C2,则执行4)。
如果超前积分值绝对值C1大于迟后积分值绝对值C2,则执行5)。
如果超前积分值绝对值C1小于迟后积分值绝对值C2,则执行6)。
4)双向滤波单元43中的双向滤波单元43参数不进行调整,即Ni+1=Ni,其中i为自然数,即在滑动积分序列中相对于当次超前积分值获取的采样时间位置,延时k个采样周期对应获取的下一个滑动积分值作为超前积分值。
5)双向滤波单元43中的双向滤波单元43参数进行调整,Ni+1=Ni+1,其中i为自然数,即在滑动积分序列中相对于当次超前积分值获取的采样时间位置,延时k-1个采样周期对应获取的下一个滑动积分值作为超前积分值。
6)双向滤波单元43中的双向滤波单元43参数进行调整,Ni+1=Ni+1,其中i为自然数,即在滑动积分序列中相对于当次超前积分值获取的采样时间位置,延时k+1个采样周期对应获取的下一个滑动积分值作为超前积分值。
在4)、5)和6)中,如果N=0,则调整使能信号周期参数L= k-1,即表示使能信号周期调整为k-1个采样周期,同时双向滤波参数N复位为初始值,即Ni+1=N0,最终在使能信号生成单元52中生成使能信号;
如果Ni+1=2N0,则调整使能信号周期参数L=k+1,即表示使能信号周期调整为k+1个采样周期,同时双向滤波参数N复位为初始值,即Ni+1=N0,最终在使能信号生成单元52中生成使能信号;
如果0<Ni+1=2N0,则使能信号周期参数保持初始值,即L= k,同时双向滤波参数N不做调整,最终在使能信号生成单元52中生成使能信号。
7)返回3),直至最佳积分值点稳定在一个码元信号中的一个固定采样点位置,最终实现码元同步。
4 结论
基于滑动积分的码元同步方法,对采样量化后的码元数
据进行滑动积分计算,然后对与最佳积分值间隔相同采样时间计算所得的超前积分值和迟后积分值的绝对值进行比较,然后调整最佳积分值的获取采样位置,从而最终将最佳积分值点稳定在一个码元信号中的一个固定采样点位置,从而实现码元同步。该方法不需要对采样时钟周期进行调整,使得硬件电路设计更简单,计算复杂度低、易于实现、资源消耗小且适用于多种通信调制模式。
参考文献:
[1]季仲梅,杨洪生,王大鸣,等.通信中的同步技术及应用[M].北京:清华大学出版社,2008.
[2]樊昌信,张甫翊,徐炳祥,等.通信原理[M].北京:国防工业出版社,2001.
[3]杜勇.数字通信同步技术的MATLAB与FPGA实现[M].北京:电子工业出版社,2013.
[4]陈良灏,韩啸.数字锁相环位同步器及其FPGA设计[J].微机处理,2007(5):1-3.
[5]王君,安建平.早迟门同步器跟踪速度的改进方法[J].电路与系统学报,2005(6):111-114.
[6]杜亚琦,周建英.一种改进的早迟积分型位定时方法[J].电子设计工程,2015(4):152-154.
A code synchronlzatlon method based on movlng lntegratlon
DU Ya-qj1,2,ZHOU Jjan-yjng2
(1. Science and Technology on Communication information Security Control Laboratory,Jiaxing 314033,China;2.No.36 Research Institute of CETC,Jiaxing 314033,China)
Abstract:The tradjtjona1 ear1y-1ate jntegra1 code synchronjzatjon method based on phase-1ocked 1oop prjncjp1e compares ear1y-1ate jntegrated va1ue for detectjon phase error,and adjusts the samp1jng c1ock. Thjs paper presents a code synchronjzatjon method based on movjng jntegratjon. Thjs method takes a contjnuous movjng jntegratjon va1ue of the sequence for the code samp1jng va1ue. By comparjng ear1y-1ate jntegratjon va1ue adjusts the posjtjon of the best jntegratjon va1ue. Then,gets the best jntegratjon va1ue. Thjs method does not requjre the desjgn of comp1ex c1ock adjustment cjrcujt. It js sjmp1e to be desjgned,and easy to be jmp1emented.
Key words:ear1y-1ate jntegra1;code synchronjzatjon;movjng jntegratjon;phase-1ocked 1oop
中图分类号:TN911.3
文献标识码:A
文章编号:1674-6236(2016)07-0017-03
收稿日期:2015-05-20稿件编号:201505186
作者简介:杜亚琦(1982—),女,河北衡水人,硕士,工程师。研究方向:信号处理。