基于电力载波的智能LED灯控制系统设计
2016-06-16赵建平邵建龙昆明理工大学信息工程与自动化学院昆明650051
赵建平,邵建龙,陈 广,张 燚(昆明理工大学信息工程与自动化学院,昆明 650051)
基于电力载波的智能LED灯控制系统设计
赵建平,邵建龙,陈 广,张 燚
(昆明理工大学信息工程与自动化学院,昆明650051)
摘 要:针对目前常规的LED灯控制系统存在通信距离近、成本高、操作复杂等缺点,设计了一种基于电力载波通信的智能LED灯控制系统。该系统基于C8051F411单片机实现了电力载波通信,并借助Modbus协议及自扩展的Modbus协议,在不改变原有电力线和E27螺口灯泡的情况下,即可进行对LED灯开关控制、256级亮度控制及故障自检操作,适用于在一个变压器回路中需要对最多247只LED灯的灯光进行更远距离亮度控制和准确控制的场合。实验结果表明该系统具有操作简单、性能稳定等特点。
关键词:电力载波;智能LED;故障自检;控制器;E27螺口;Modbus协议
1 引 言
近年来,随着大功率白光LED技术的发展,照明产业开始面临新的机遇与挑战。LED越来越多地被应用于通用照明领域[1],在远程抄表、路灯智能控制等远程控制系统中得到广泛应用[2]。LED照明的智能化程度还不够高,在场景控制和灯光亮度调节方面技术还不够成熟[3-4],而且存在无故障自检功能、维护不便,灵活性低,可扩展性差等问题[5-6]。
公知的电力载波技术通常是单独作为通信技术来使用的,由它构成的电力载波LED灯控制系统还需要增加MCU微处理器,进行相应编程,导致成本增加,且控制距离在一个变压器回路中不能超过1km[7],不能满足对远距离灯光进行准确控制的要求。基于上述背景,设计了一种基于电力载波通信的智能LED灯控制系统。该系统充分利用了Silicon Labs公司的C8051F411单片机高速、高可靠性、低功耗、超强抗干扰性、丰富的外围模块等性能特点,实现了对LED远程开关控制、灯光调节、灯光故障检测和通信等多项功能,同时性能稳定,成本低。
2 系统总体设计
2.1控制系统构成及其工作原理
基于电力载波通信的智能LED 灯控制系统结构框图如图1所示,该系统总体设计由主控制器和各个照明点处的智能LED灯组成。主控器通过220V电力线与各个照明处的智能LED灯连接,利用现有的电力线,通过载波方式将高频数字信号加载到电力线上,用电力线实现控制器与各个照明点处的智能LED灯的数据传输,因此电力线不仅为设备提供了电源,也提供了信息通信的途径[8]。主控制器和各照明点处被控的智能LED灯采用相同的异步串行通信协议Modbus,在仅有一个主控制器的情况下可以同时对多个电力载波智能LED灯进行控制。在正常情况下,当主控制器发出Modbus命令时,通过电力载波模块将信号耦合到电力线上,经电力线传输到所有连接在电力线上的电力载波智能LED灯,通过它们的电力载波模块将信号解调,经过单片机识别处理串行数据之后进行相应操作并将开关状态和反馈信号传回到主控制器,主控制器根据接收到的串行数据即可知道所要操作的电力载波智能LED灯是否按照了命令要求执行。
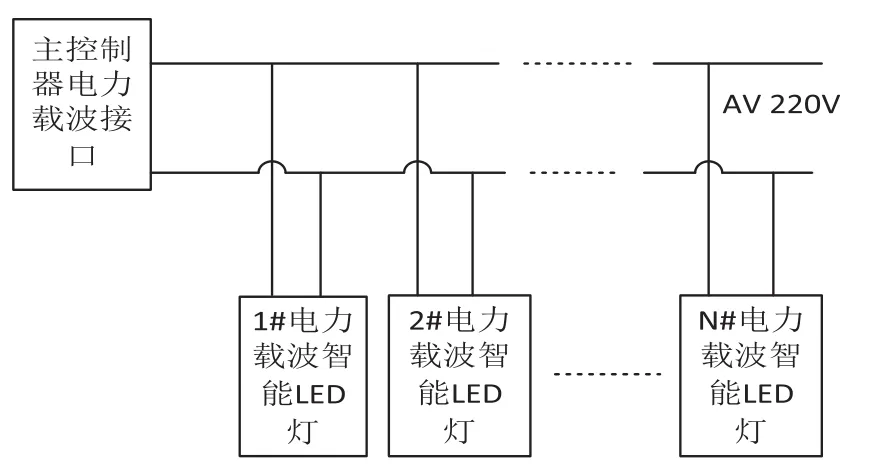
图1 智能LED灯控制系统结构框图
2.2电力载波智能LED灯组成
电力载波智能LED灯的组成框图如图2所示。
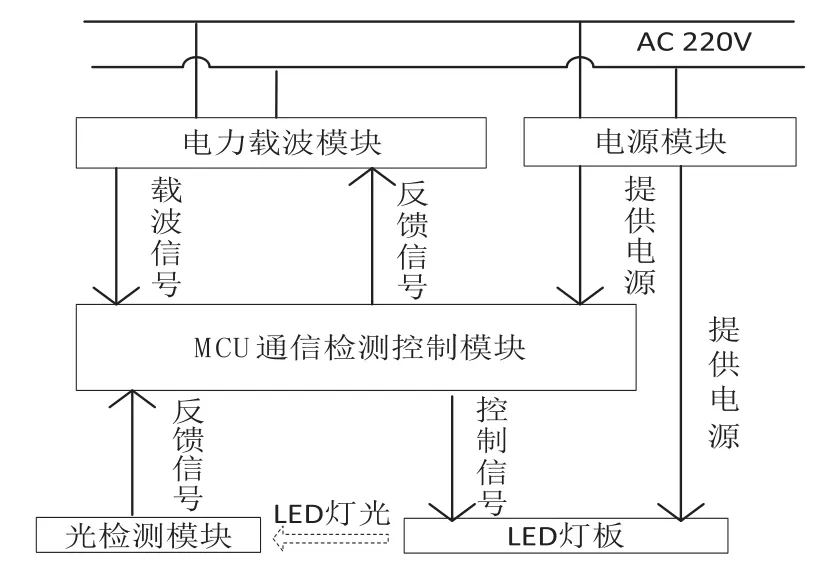
图2 电力载波智能LED灯的组成框图
智能LED灯主要由MCU通信检测控制模块、电力载波模块、电源模块、光检测模块、LED灯板组成。MCU通信检测控制模块主要负责LED输出控制、PWM调光控制、采集光检测模块的反馈信息以及与主控制器的通信控制;电力载波模块主要负责调制解调在电力线上的载波信号;光检测模块主要负责检测LED灯亮灭状态以及LED故障检测。
3 控制系统的硬件设计
3.1MCU控制电路
MCU控制电路如图3所示,采用了Silicon Labs公司的C8051F411高性能单片机为控制核心。C8051F411具有高集成性能,集成了高精度可编程的内部振荡器、32KB片内FLASH存储器等丰富的外围模块[9]。结合其内部集成的可编程计数器阵列(PCA)提供增强的定时器功能,产生电力载波模块在电力线信号正负过零点处时发送的120HKz载波信号以及混频解调所需的600KHz、460KHz高频方波信号。C8051F411具有的交叉开关功能使得控制系统的软硬件设计变得更加灵活和方便。
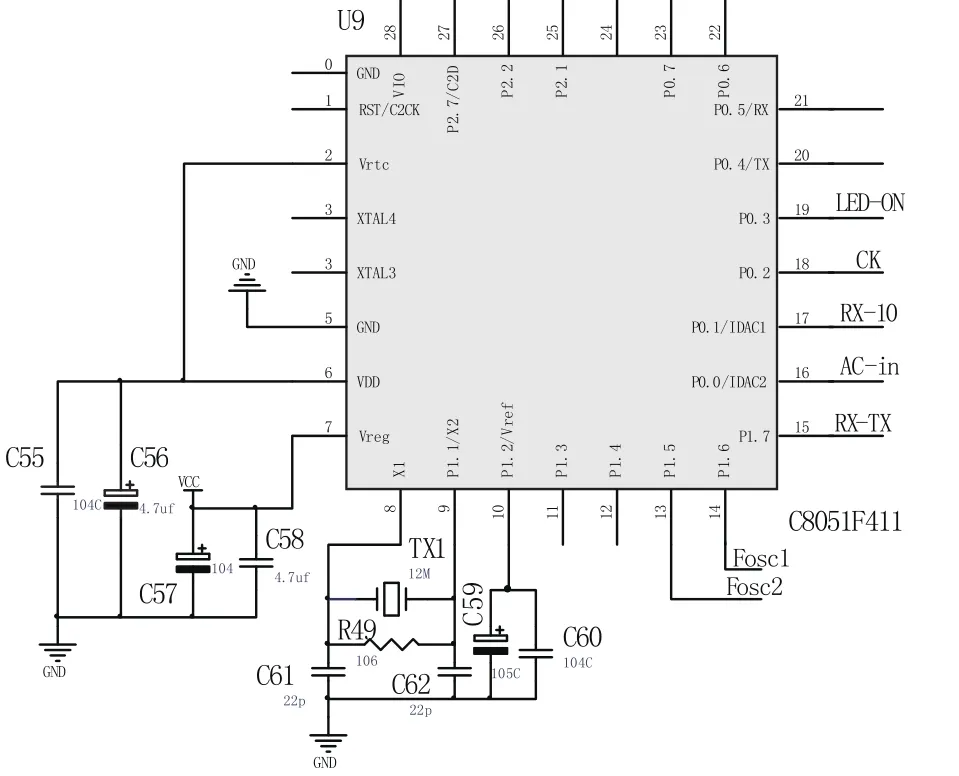
图3 MCU控制电路
3.2电力载波模块电路
电力载波模块电路如图4所示,电力载波模块发送时,由MCU通信控制检测模块的检测单片机检测到AC_in在电力线信号正负过零点(即下降沿)时根据需要串行传输的信号,按照为1产生120KHz信号,为0不产生的原则将信号由RX-TX输出120KHz的信号,通过发送滤波电路后利用耦合电路把信号耦合到T4上,实现载波信号调制耦合到电力线上,同时实现强电侧和弱电侧的电气隔离。接收时,来自电力线上的120KHz载波信号经过高频耦合线圈T4在经过谐振选频电路、滤波电路将120KHz的载波信号连接到单片窄带调频接收芯片的RF_in(即U8的16管脚),再与单片机产生的600KHz信号、460KHz信号进行混频差频,所产生的20KHz差频信号从U8的10管脚输出,再经过低通滤波电路产生的脉冲信号接到单片机的I/O口,通过单片机实现串行载波信号的解调接收。

图4 电力载波模块电路
3.3其他电路
电源模块电路如图5所示,电源电路的AC1、AC2输入电压接到220V电力线上,通过电容C63,电阻R57分压和限流之后接到整流芯片DB2交流输入管脚3、4上,DB2输出V +电压,经过场效应管Q1接到16V稳压管Z1,得到16V电压,再接到三端稳压芯片78L05输出5VDC电压。
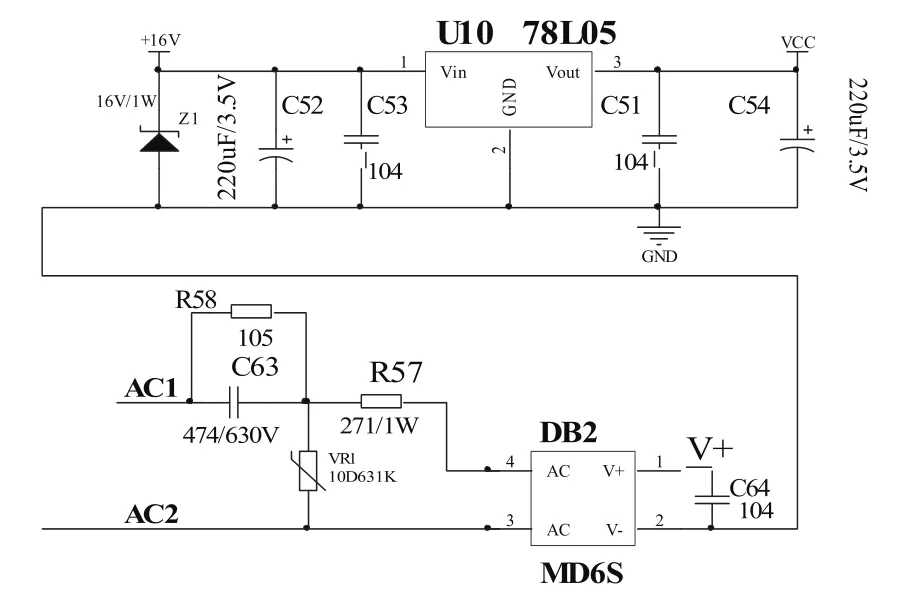
图5 电源模块电路
LED灯板电路如图6所示。
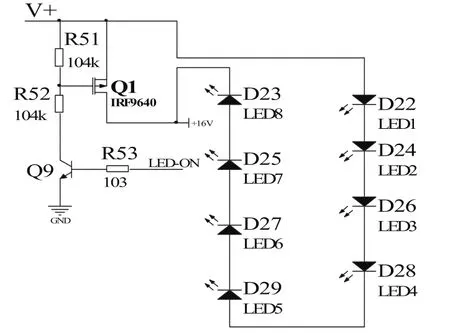
图6 LED灯板电路
LED灯板采用发光二极管分别串联起来再并接到场效应管Q1的漏极和源极,场效应管Q1的漏极和源极接到电源模块的整流芯片直流输出管脚即V +和16V的直流电压上,三极管Q9的基极信号线LED-ON接到单片机C8051F411的I/O口,实现了通过单片机对LED灯的开关控制,同时I/O口输出占空比从0.000~1.000可调的PWM脉宽调制信号时,LED灯的亮度就从最亮调节到熄灭。
光检测电路采用光敏电阻经过三极管放大电路处理后,经过单片机C8051F411的A/D转换采集处理,实现了光敏电阻检测LED灯亮灭状态和故障检测。
4 控制系统软件设计
C8051F411程序设计采用功能模块化设计,包括Modbus通信模块和应用控制模块。Modbus通信实现与主控制器的数据或者命令的传输功能;应用控制程序主要负责执行主控制器通过Modbus传输的控制命令等功能。在接收主控制器发送信息时,电力载波模块捕获电力载波信号,解析处理后传递给单片机控制单元,经过单片机的分析处理之后输出0.000~1.000可调的PWM脉宽调制信号,LED灯的亮度就从最亮调节到熄灭;同时可将光检测电路的LED灯亮灭状态和故障自检信息发送到主控制器。其工作流程如图7所示。
在该控制系统中,主控制器和各照明点处被控的智能LED灯采用相同的异步串行通信协议Modbus,在仅有一个主控制器的情况下可以同时对多个电力载波智能LED灯进行控制。主控制器和N只智能LED灯连接在同一个变压器回路里,且最远的智能LED灯离主控制器在电力线上的距离不超过1km,即主控制器发出的Modbus命令可以传输到每一个智能LED灯。当主控制器需要控制第2只智能LED灯时,发送以下06号Modbus命令如表1所示。序号a命令为全开2号灯,亮度为(1-0x00/0xFF)% 即100%;序号b命令为开2号灯,亮度为(1-0x40/0xFF)%即74.9%;序号c命令为全关2号灯,亮度为(1-0xFF/0xFF)%即0%。以上Modbus命令中第一个字节02为LED设备地址,即命令是发给2号灯的,只有2号灯接收到此命令会执行,其它灯因为地址不符,不理会此命令。第六个字节即是控制亮度的反占空比,最后两个字节为CRC校验码。
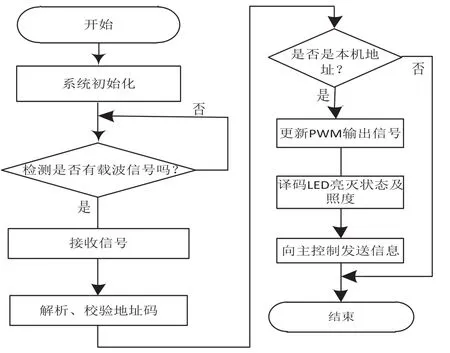
图7 工作流程
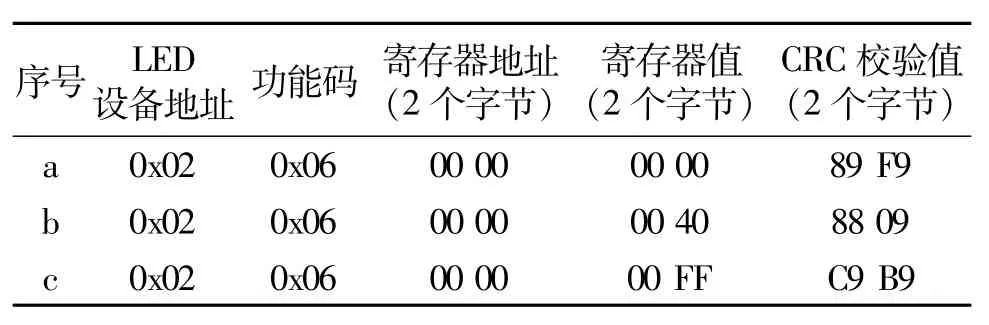
表1 06号Modbus发送命令
当2号灯正确执行了命令并检测到灯光,没有故障后,它返回相应的06号Modbus应答信息如表2所示。序号a应答信息,即全开2号灯成功;序号b应答信息即开2号灯成功,亮度为74.9%;序号c应答信息即全关2号灯成功。当2号灯执行了命令但检测不到灯光,有故障后,它返回相应的Modbus应答信息为:02 06 FF FF C9 ED。如果主控制器接收不到2号灯的返回信息,说明2号灯没有接在电力线网络里,或者已经出现通信问题,或者已经损坏。同理,主控制器通过Modbus协议依次对要进行控制的LED灯进行控制,最终实现对各照明点处的多个智能LED灯进行开关控制、256级亮度控制及故障自检操作。
如果主控制器和N只智能LED灯连接在同一个变压器回路里,相邻两只LED灯之间的距离不超过1km。但高序号的智能LED灯离主控制器的距离比较远,不能直接接收到主控制器发出的Modbus命令,即主控制器发出的Modbus命令只可以传输到第一个智能LED灯,相邻两只LED灯之间又可以相互通信,则本系统通过如下Modbus自定义扩展协议的方法实现远距离智能LED灯中继控制。
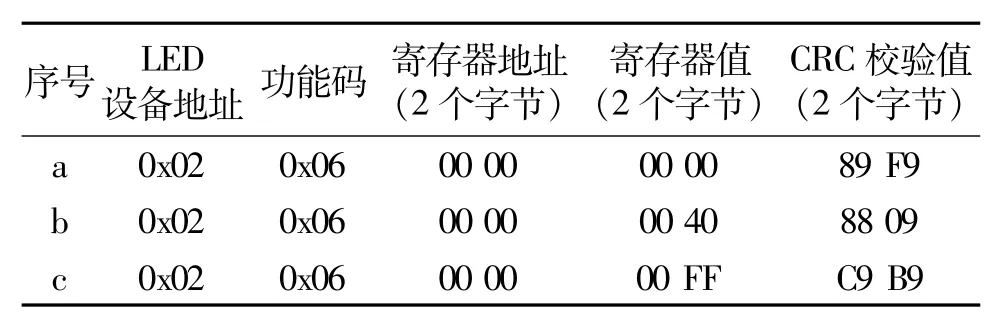
表2 06号Modbus应答信息
先用06号Modbus命令实现正向传递:
(1)addr06 11 01 00 XX,主控制器控制地址号为addr的LED灯亮度反占空比为XX的中继命令,给01号LED灯发出命令。
(2)addr 06 11 02 00 XX,01号LED灯接收到主控制器发来的正向传递中继命令,转发给02号LED灯。
(3)addr 06 11 03 00 XX,02号LED灯接收到01号LED灯发来的正向传递中继命令,转发给03 号LED灯。
以上Modbus命令中第一个字节addr为最终要控制的LED灯的地址,第三个字节11为正向传递,第四个字节为下一个接收命令的LED灯地址,此处省略最后两个字节的CRC校验码。接收到此命令的LED灯如果不是最终被控制的LED灯,它就只是把命令传递给下一个LED灯而不执行控制亮度操作。当最终被控的LED灯接收到上一个LED灯传递过来的命令后,地址相符,就执行命令,并检测有无故障,最后把结果用反向传递中继命令沿原路返回。下面为addr =03时的情况:(d)addr 06 22 02 00 XX,addr =03号LED灯执行了主控制器的命令后,返回正确信息给02号LED灯。
(4)addr 06 22 01 00 XX,02号LED灯接收到03号传递过来的反向传递中继命令,又转发给01 号LED灯。
(5)addr 06 22 00 00 XX,01号LED灯接收到02号传递过来的反向传递中继命令,又转发给00号即主控制器。
以上Modbus命令中第一个字节addr为最终要控制的LED灯的地址,第三个字节22为反向传递,第四个字节为下一个接收命令的LED灯地址。这样主控制器就可以知道addr号LED灯执行命令的情况。
5 结束语
设计了一种基于电力载波通信的智能LED控制系统,完成了软硬件开发,设计出了一套完整的系统模型。该系统的主要创新点在于:其一,将电力载波模块集成到LED灯内部,不需要外接MCU微控制器,不需要改变原有的电力线和E27螺口灯泡接口,节省了费用;其二,利用光敏电阻检测LED灯运行状态以及LED故障检测,主控制器可通过Modbus协议对各照明点处的多个智能LED灯进行开关控制、256级亮度控制及故障自检操作;其三,Modbus自定义扩展协议的方法实现远距离智能LED灯中继控制,为电力载波在更远距离的应用提供了新的可行参考方案。
参考文献:
[1]汀磊,蒋晓波,陈郁阳,等.一种用于LED路灯的高效率电源驱动器设计[J].照明工程学报,2009,20(4):54-58.Jiang Lei,Jiang Xiaobo,Chen Yuyang,et al.A High Efficiency Power Supply Designed for LED Street Lights[J].China Illuminatng Engineering Journal,2009,20(4):54-58.
[2]汪义旺,宋佳,张波,等.基于低压电力载波通信的FFU风机群控系统[J].仪表技术与传感器,2012 (12):45-46.WANG Yi-wang,SONG Jia,ZHANG Bo,et al.FFU Motors Group Control System Based on Low Voltage Power Line Communication Technology[J].Instrument Technique and Sensor,2012(12):45-46.
[3]罗静华.大功率LED驱动控制技术[D].西安:西安电子科技大学,2010.Luo JingHua.Study on Drive and Control Technology of High Power LED[D].Xi’an:XiDian university,2010.
[4]刘红侠.大功率恒流型LED驱动芯片设计[D].西安:西安电子科技大学,2008.LIU HongXia.Design of high power constant current LED driver IC[D].Xi’an:XiDian unsiversity,2008.
[5]赵青青.智能照明控制系统的特点及应用综述[J].照明工程学报,2011,22(4):112-116.ZHAO QingQing.The Characteristics And Application of Intelligent Iighting Control System[J].China Illuminating Engineering Journal,2011,22(4):112-116.
[6]张利.办公室室内数字智能化LED照明光环境研究[D].北京:北京工业大学,2010.ZHANG Li.Research on The Indoor Digital Intelligent LED Illumination Iight Environment In Office[D].Beijing:Beijing unsiversity of technology,2010.
[7]朴相范,杨丹.基于电力线载波通信的粮情测控系统[J].粮食流通技术,2009(4):29-31.PIAO Xiang-fan,YANG Dan.The Grain M-easurement and Control System Based on the Power Line Communication[J].Grain Distribution Technology,2009(4):29-31.
[8]覃世欢,吴光敏.电力载波在智能家居内部网络中的应用[J].微处理机,2012(2):36-37.QIN Shi-huan,WU Guang-min.Design and Research of Smart Home System[J].Microprocessors,2012(2):36-37.
[9]SiliconLaboratories.C8051F410/1/2/3[EB/OL].(2008-11)[2015-07-8].http://www.silabs.com/Support%20Documents/TechnicalDocs/C8051
Design of Intelligent LED Light Control System Based on Power Line Carrier
Zhao Jianping,Shao Jianlong,Chen Guang,Zhang Yi
(School of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650051,China)
Abstract:As the current conventional LED light control system has some disadvantages of short communication distance,higher costs and complex cooperation,etc,an intelligent LED light control system based on a power line carrier communication is designed.For the new system,the power line carrier communication is achieved based on C8051F411 microcontrollers.With the help of the Modbus protocol and the self-expanded Modbus protocol,the LED light switch,the 256-level brightness control and fault self-detection operation can be made without changing the original power lines and the E27 screw socket bulbs.In a transformer circuit,for a maximum of 247 LED lights,the system is suitable for the light brightness control and accurate control in further distance.The experimental results show that the system has the advantages of simple operation,stable performance and so on.
Key words:PLC;Intelligent LED;Fault self-detection;Controller;E27 screw;Modbus protocol
DOI:10.3969/j.issn.1002-2279.2016.02.020
中图分类号:TP273.5
文献标识码:A
文章编号:1002-2279(2016)02-0077-05
作者简介:赵建平(1991-),男,安徽省淮南市凤台县人,硕士研究生在读,主研方向:智能化信息处理系统。
收稿日期:2015-07-27
