谐振式巨磁阻微机械陀螺噪声分析*
2016-06-16褚伟航白晓晓蒋孝勇李孟委
褚伟航,白晓晓,蒋孝勇,李孟委
(1. 中北大学 电子测试技术国家重点实验室,山西 太原 030051; 2. 中北大学 仪器与电子学院,山西 太原030051;3. 中北大学 微系统集成研究中心,山西 太原 030051)
谐振式巨磁阻微机械陀螺噪声分析*
褚伟航1,2,3,白晓晓1,2,3,蒋孝勇1,2,3,李孟委1,2,3
(1. 中北大学 电子测试技术国家重点实验室,山西 太原 030051; 2. 中北大学 仪器与电子学院,山西 太原030051;3. 中北大学 微系统集成研究中心,山西 太原 030051)
摘要:巨磁阻效应微陀螺具有高灵敏、 低噪声等优点. 本文详细阐述了巨磁阻效应微陀螺的工作原理,设计了微陀螺结构,其驱动方向频率为5 553.7 Hz,检测方向频率为5 556.7 Hz,频率差仅为3 Hz,实现了模态的良好匹配. 设计了应用于该微陀螺中的检测磁场,测试了一款巨磁阻器件的灵敏度,基于上述结果完成了巨磁阻微陀螺的系统级仿真,并分析了巨磁阻微陀螺的噪声组成以及噪声的计算. 仿真结果表明,将巨磁阻效应应用于陀螺的角速率信号检测中,可以实现灵敏度为46 mV·((°)/s)-1,噪声为 的信号检测.
关键词:巨磁阻; 微机械陀螺; 系统级仿真; 噪声分析
0引言

1工作原理及理论分析
1.1巨磁阻微陀螺的工作原理
如图 1 所示为巨磁阻效应微陀螺的工作原理. 首先,陀螺放置在由永磁体产生的匀强磁场中,然后,在驱动导线上加载交变驱动电流以产生交变洛伦兹力,使质量块在该驱动力的作用下沿驱动方向(X轴)往复振动. 当有Y轴方向的角速率输入时,质量块在柯氏力的作用下沿检测方向(Z轴)运动,并带动磁体远离或靠近磁敏电阻. 由于二者间距发生了变化,使磁敏电阻敏感到的磁场发生变化,从而引起磁敏电阻中自旋相关的隧穿电流发生变化,进一步导致磁敏电阻的阻值发生剧烈变化,通过测量阻值变化能够实现对微弱柯氏力地检测.

图 1 磁阻随间距变化原理图Fig.1 The principle diagram of the magnetic resistance changing with distance
1.2微机械陀螺的动力学方程
根据微机械陀螺的工作原理,它的简化动力学模型如图 2 所示.

图 2 微陀螺的动力学模型Fig.2 Dynamic model of micro gyroscope
微机械陀螺的动力学方程为
(1)
(2)
式中:F0为驱动力幅值;mx,mz分别为微陀螺驱动质量与检测质量;kx,cx分别为驱动模态的刚度与阻尼;kz,cz分别为检测方向的刚度与阻尼. 求解动力学方程,可以得到微陀螺驱动方向的稳态幅值为
(3)
式中:ωx为驱动模态角频率;ξx为驱动模态阻尼比.
检测方向的稳态幅值为
(4)
式中:ωz为驱动模态角频率;ξz为驱动模态阻尼比.
微陀螺的结构灵敏度为
(5)
1.3巨磁阻微陀螺的灵敏度分配
根据隧道磁阻微陀螺原理及其系统构成,我们可以将隧道磁阻微陀螺的灵敏度分为三部分: 结构灵敏度、 磁场灵敏度以及磁阻灵敏度. 信号转换过程分别为角速率信号转换为位移信号,位移信号转换为磁信号,磁信号转换为电信号. 微陀螺灵敏度可按如下方式进行分解,三者相乘可得微陀螺的灵敏度,即
(6)
通过对图 3 中所示三部分灵敏度的规划,可以实现对器件总灵敏度的规划.

图 3 灵敏度分配图Fig.3 The diagram of distribution of the sensitivity
2巨磁阻微陀螺的灵敏度设计
2.1结构灵敏度设计
利用有限元仿真软件对微陀螺结构进行模态分析与动力学分析,结果如图 4 和表 1 所示.

图 4 微陀螺模态仿真Fig.4 Mode simulation of micro gyro
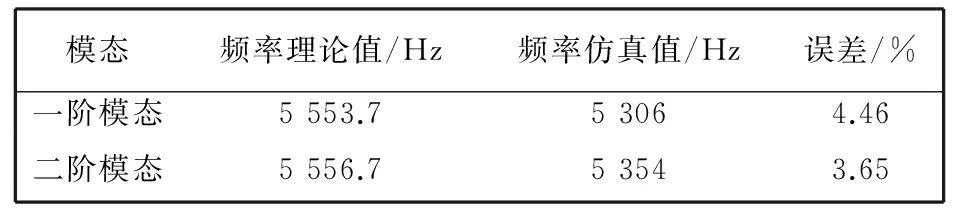
模态频率理论值/Hz频率仿真值/Hz误差/%一阶模态5553.753064.46二阶模态5556.753543.65
模态分析结果显示,微陀螺模态频率的理论值与仿真值误差均在5%以内,在可接受范围内,证明了所设计结构的频率匹配性较好. 仿真结果与理论计算结果之间的误差主要产生原因为,ANSYS有限元分析软件网格划分的疏密会影响计算结果,若网格稀疏会致使有限元计算不精确; 再者,理论计算公式是对实际理论模型的抽象与简化,简化后的公式计算与实际模型相比会有一些误差. 下面对微陀螺的振动特性进行分析,在驱动方向加载与驱动力等效的位移载荷,Y方向施加1 rad/s的角速率,利用ANSYS仿真得到检测方向位移结果,如图 5 所示.
由图 5 可以得到,仿真得到微陀螺的检测方向位移幅值为2.070 8×10-6m,利用式(5)可以求得
理论计算得到的微陀螺位移灵敏度为32.33 nm·((°)/s)-1,仿真值与理论值较为接近,说明结构设计的合理性.
以上完成了微陀螺结构灵敏度的设计,下面进行磁场灵敏度以及磁阻灵敏度的设计.

图 5 检测方向位移分析结果Fig.5 The displacement analysis results of Detection direction
2.2检测磁场灵敏度的设计
磁场设计是巨磁阻微陀螺的关键内容之一,本文设计被应用于巨磁阻效应微陀螺中的磁场,分驱动磁场与检测磁场两部分. 驱动磁场为匀强磁场,磁场强度可根据所需驱动力大小来进行选择. 检测磁场的设计为本文分析的重点,它应具有两个特点,首先在离面方向上应具有较高的磁场变化率,可以实现微陀螺的高灵敏检测; 其次驱动时检测磁场应尽量接近为匀强磁场,避免与检测时的磁场信号发生耦合干扰. 结合工艺条件与磁场分布特性,采用矩形磁体应用于巨磁阻微陀螺中,图 6 所示为矩形永磁体磁场分布的建模[7].

图 6 矩形永磁空间外磁场分布模型Fig.6 External magnetic field distribution model of rectangular permanent magnet
定义Z方向为微陀螺的检测方向,X方向为驱动方向. 设矩形磁体的长、 宽、 高分别为a、b、h,永磁体内部任一点(x0,y0,z0)的z0与dz0构成的磁体薄膜在其空间外任一点P(x,y,z)处,由电流环A′B′C′D′产生的磁场为dB,则空间中的磁场由3个方向的分量表示为[8]
(7)
(8)
(9)
其中

式中:Γ是以γ1,γ2,γ3为自变量的一个函数记号;Js为与平面xOy平行的任一平面上的面电流密度;μ0为真空磁导率;Ψi是以ψ1,ψ2,ψ3为自变量的一个函数记号. 利用以上这三个式子,可以将一个磁体周围空间中任意一点的磁场强度分解到X、Y、Z三个方向上,从而计算出磁场在各个方向上的分量.
针对所得磁场在三个方向分量公式,设计磁体尺寸为长340 μm,宽200 μm,厚5 μm. 利用MATLAB软件对矩形永磁体磁场分布特性进行仿真分析,检测磁场在驱动方向分量的仿真结果如图 7,图 8 所示.

图 7 驱动时检测磁场分布图Fig.7 Magnetic field distribution of detection direction when driving

图 8 检测磁场在驱动方向的磁场变化率Fig.8 The magnetic field change rate of detection magnetic field in the driving direction
从图 7 中可以看出,在x方向除边缘区域,检测磁场在驱动方向分量的磁场分布近乎为匀强,图8所示其匀强范围为100~240 μm. 所设计微陀螺驱动梁的运动间隙为80 μm,所以巨磁阻器件在驱动方向可布置在磁体的120~180 μm这个范围内,如图 7 所示. 图 8 中取接近匀强磁场的区域进行线性拟合,得到在图 7 所示匀强磁场范围内,磁场的变化率为0.005 4 Oe/nm,磁场变化率很小,下面分析检测磁场在检测方向的磁场变化率情况.
图 9 所示为检测磁场在检测方向的磁场分布情况,从图中可以看出,在磁体表面,磁场变化率为零,磁场强度最大. 接下来对检测磁场在检测方向分量进行分析,磁场检测方向分量Hz,在检测方向分布曲线如图 10 所示.
取磁场强度分布线性度较好的范围(-130~-70 μm)对其进行线性拟合,得到结果如图 10 所示,拟合曲线的斜率即磁场灵敏度约为0.1 Oe/nm.

图 9 检测时检测磁场分布图Fig.9 Magnetic field distribution of detection direction when detecting

图 10 检测方向磁场变化率Fig.10 The magnetic field change rate of detection direction
至此,完成了对磁场灵敏度的设计. 关于磁阻灵敏度的设计,本文选择了一款巨磁阻器件对其灵敏度进行测试,得到其磁阻灵敏度. 以实测磁阻灵敏度水平作为本文微陀螺的磁阻灵敏度.
2.3磁阻灵敏度的设计及测试
通过搭建实验,在磁屏蔽环境下分别测试了巨磁阻器件与各向异性磁阻器件的灵敏度并进行了对比. 测试环境及使用仪器如图 11 所示.

图 11 磁阻测试环境及使用仪器Fig.11 Magnetic resistance test environment and the use of instruments
无磁屏蔽桶提供实验所需的磁屏蔽环境,它提供的磁场范围为(5.57×10-7~0.890 68)Oe,可以满足测试需求. 磁屏蔽桶的电源由信号发生器输出电压提供,通过精密万用表的反馈电压值即可计算桶内磁场强度. 传感器的供电电压由5 V 的稳压源提供,传感器的输出电压由另外一个精密万用表检测. 其测试系统示意图如图 12 所示.

图 12 测试系统示意图Fig.12 Schematic diagram of test system
将传感器测试电路板固定在安装台上,保证传感器的敏感轴方向与桶轴方向平行. 给传感器供电,由屏蔽桶提供磁场环境,记录传感器的输出电压值. 最后得到实验测试结果如图 13 与表 2 所示.

图 13 实验测试结果Fig.13 Experimental test results

(mV/Oe)
通过测试结果可以得到,巨磁阻传感器的灵敏度比各向异性磁阻传感器的灵敏度高出7倍,优势比较明显,在工作电压为5 V的情况下,巨磁阻的灵敏度为14.151 mV/Oe.
3微陀螺系统级仿真
3.1巨磁阻微陀螺的灵敏度仿真
上述部分完成了微陀螺结构灵敏度、 磁场灵敏度、 磁阻灵敏度的设计,根据图 3 所示,可以由式(6)算得微陀螺的灵敏度为
36nm/((°)/s)×0.09Oe/nm×14.151mV/Oe=

下面用MATLAB软件中的SIMULINK模块对巨磁阻微陀螺进行系统级仿真,验证角速率信号向电学信号的转化过程. 微陀螺系统级仿真模型如图 14 所示.

图 14 巨磁阻微陀螺系统级仿真模型Fig.14 The system level simulation model of GMR gyro
图 14 所示模型为巨磁阻微陀螺的整体框架,在驱动方向施加正弦驱动力时,微陀螺在驱动方向做简谐振动,当有角速率信号输入时,在柯氏力作用下微陀螺在检测方向做简谐振动,振动的幅值与输入角速率信号成正比. 系统级仿真得到的结果如图 15 所示.
如图 15(a)所示为输入的正弦角速率信号,以驱动方向位移信号为调制信号即高频载波信号,得到载波后的信号如图15(b)所示; 同样以驱动方向位移信号作为解调信号,解调后的曲线如图15(c),此时信号中仍夹杂有高频信号,采用低通滤波器滤除高频信号,还原原始信号,得到微陀螺的电压灵敏度输出,如图15(d)所示.
通过系统级仿真对微陀螺的设计参数进行分析,验证了角速率信号到电学信号的转换过程. 仿真验证微陀螺的灵敏度约为46 mV·((°)/s)-1,与理论值相对应.
3.2巨磁阻微陀螺的输出噪声分析
根据文献[9-10]中对微陀螺输出噪声的求解方法,得到计算微机械陀螺输出噪声的计算公式为
(10)

4结论

参考文献:
[1]曹慧亮, 李宏生, 王寿荣, 等. MEMS陀螺仪结构模型及系统仿真[J]. 中国惯性技术学报,2013,21(4): 524-529.
Cao Huiliang, Li Hongsheng, Wang Shourong, et al. Structure model and system simulation of MEMS gyroscope[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 524-529. (in Chinese)
[2]吴学忠,刘宗林,李圣怡. 微硅陀螺性能影响因素及其对策研究[J]. 微纳电子技术,2003,40(7): 274-276.
Wu Xuezhong, Liu Zonglin, Li Shengyi. Influence factors and enhancement on property of micro-silicon gyroscope[J]. Micronanoelectronic technology, 2003, 40(7): 274-276. (in Chinese)
[3]李小卿, 常洪龙, 焦文龙, 等. 基于杠杆的微机械陀螺结构设计与仿真[J]. 微纳电子技术,2012,49(5): 313-317.
Li Xiaoqing, Chong Honglong, Jiao Wenlong, et al. Structure design and simulation of the MEMS gyroscope based on leverage mechanism[J]. Micronanoelectronic technology, 2012, 49(5): 313-317. (in Chinese)
[4]Jianbing Xie, Qiang Shen Yongcun Hao, et al. Design, fabrication and characterization of a low?noise Z?axis micromachined gyroscope[J]. Microsyst Technol, 2015, 21(2): 625-630.
[5]陈志勇, 张嵘, 周斌. 一种低机械噪声弱耦合的微机电陀螺敏感结构[J]. 中国惯性技术学报,2015,23(3): 373-378.
Chen Zhiyong, Zhang Rong, Zhoubin. MEMS gyroscope structure with low mechanical-thermal noise and weak mechanical coupling[J]. Journal of Chinese Inertial Technology, 2015, 23(3): 373-378. (in Chinese)
[6]石云波, 张琼, 罗源源, 等. 基于隧道效应的MEMS陀螺仪的研究[J]. 压电与声光,2010,32(5): 750-753.
Shi Yunbo, Zhang Qiong, Luo Yuanyuan, et al. Research of MEMS gyroscope based on tunneling effect[J]. Piezoelectrics and acoustooptics. 2010, 32(5): 750-753. (in Chinese)
[7]苟晓凡, 杨勇, 郑晓静. 矩形永磁体磁场分布的解析表达式[J]. 应用数学和力学,2004,25(3): 271-278.
Gou Xiaofan, Yang Yong, Zheng Xiaojing. Analytic expression of magnetic field distribution of rectangular permanent magnets[J]. Applied mathematics and mechanics, 2004, 25(3): 271-278. (in Chinese)
[8]刘宏娟. 矩形永磁体三维磁场空间分布研究[D]. 北京: 北京工业大学,2006.
[9]Seltzer S J. Developments in Alkali-metalAtomic Magnetometry. Ph. D. Thesis, Princeton University, Princeton, NJ, USA, 2008.
[10]蒋庆华,苑伟政,李晓莹. 电容式z轴微机械陀螺的噪声抑制[J]. 微纳电子技术,2009,46(10): 616-620.
Jiang Qinghua, Yuan Weizheng, Li Xiaoying. Noise reduction of capacitivez-Axis microgyroscopes[J]. Micronanoelectronic technology, 2009, 46(10): 616-620. (in Chinese)
[11]Pannetier-Lecoeur M, Fermon C, de Vismes A, et al.Low noise magnetoresistive sensors for current measurement and compasses[J]. Journal of Magnetism and Magnetic Materials, 2007, 31(6): 246-248.
Design and Noise Analysis of a MEMS Gyroscope Based on Giant Magnetoresistance Effect Detection
CHU Wei-hang1,2,3, BAI Xiao-xiao1,2,3, JIANG Xiao-yong1,2,3, LI Meng-wei1,2,3
(1. Science and Technology on Electronic Test & Measurement Laboratory,North University of China, Taiyuan 030051, China;2. School of Instrument and Electronics, North University of China, Taiyuan 030051, China;3. Center for Microsystem Intergration, North University of China, Taiyuan 030051, China)
Abstract:MEMS gyroscope based on giant magnetoresistance (GMR) effect has the advantages of high sensitivity and low noise. In this paper, the working principle of the micro gyroscope with GMR effect is described in detail, and the micro gyroscope structure is designed. The frequency of driving direction is 5 553.7 Hz, and the frequency of detection direction is 5 556.7 Hz, so the frequency difference is only 3 Hz, this design having good matching mode. The detection magnetic field applied in the micro gyro is designed and the sensitivity of GMR sensor has been tested. Based on the above results the system level simulation of the GMR micro gyroscope has been completed. Finally, the noise composition and noise calculation of the GMR gyroscope are analyzed. The simulation results show that the sensitivity of the GMR gyroscope can achieve 46 mV·((°)/s)-1, the noise level of the GMR gyroscope can achieve
Key words:giant magnetoresistance (GMR); MEMS gyroscope; system level simulation; noise analysis
文章编号:1673-3193(2016)02-0142-08
*收稿日期:2015-09-05
作者简介:褚伟航(1989-),女,硕士生,主要从事微纳器件及系统方面的研究.通信作者: 李孟委(1975-),男,副教授,博士,主要从事开展新原理MEMSN惯性传感器及导航研究.
中图分类号:TP212
文献标识码:A
doi:10.3969/j.issn.1673-3193.2016.02.009
