基于迅捷联测的全息三维联测方法
2016-06-15付成群谢立军
付成群,方 亮,谢立军,王 勇
(解放军理工大学 野战工程学院,南京 210007)
基于迅捷联测的全息三维联测方法
付成群,方亮,谢立军,王勇
(解放军理工大学 野战工程学院,南京210007)
摘要:为快速获取和实现再现空间实体对象的姿态、分层、分类以及其内部地球物理特性,在3个基本假设的基础上,引入了全息三维联测的概念与内涵,在理论上论述了机载双频激光雷达扫描技术、激光—高光谱共光路技术和瞬变电磁地空探测技术,并建立了迅捷联测物理模型和全息三维数学模型,在应用上论述了空陆联测技术、水陆联测技术和全息三维建模方法;空地联测、光谱联测、水陆联测、地空探测等联测理论与方法,在探测方法上密切关联,在探测对象上互相补充,从而形成了全息三维联测方法。
关键词:全息三维;迅捷联测; 物理模型; 数学模型
1问题提出
为解决高密度、高精度空间海量数据的快速获取问题,选用综合集成了激光扫描仪、大幅面数字相机、差分导航定位和惯性测量装置的机载激光雷达,可快速获取高精度环境数据是有效措施。激光扫描可快速获取高精度环境数据,但缺乏光谱特征数据,揭露伪装能力弱;高光谱具有识别伪装目标优势,但识别目标属性受限制,将两者结合可以解决空间目标的精确定位和属性识别等问题。发展高光谱和激光联合测量是必然之路。高光谱-激光雷达共光路联测能有效解决空间目标的精确定位和精细目标识别问题,但高光谱-激光雷达共光路联测只能探测地表以上目标,不能从空中对水下目标进行探测。为了解决从空中对地表和水下目标同步联测,发展水陆联测系统成为必然选择[1]。水陆联测解决了地表和水下目标同步联测问题,但测绘技术无法探测地表以下目标,对地下目标的成像探测无能为力,必须借助于地球物理探测技术,解决从空中对地下目标探测的难题,地空逆合成孔径瞬变电磁探测方法[2]就是解决从空中对地下目标成像探测的不二选择。
空地联测、高光谱激光联测、水陆联测、地空探测等探测理论与方法,在探测方法上相互关联,在探测对象上互相补充,全息三维联测是测绘学与地球物理学的交叉融合发展的产物。
2基本假设
1)实体对象在空间上具有姿态、分层、分类的结构性和内部的地球物理特性,光学可见的实体对象具有光谱特性,地下介质实体目标只能探测空间姿态和地球物理属性数据,不能获取光谱属性数据;
2)地面和空中可见光实体对象由其空间维结构信息和光谱维属性信息进行逆向精细建模再现,必要时增加内部地球物理特征信息进行界定;
3)地下和水下实体对象由其空间维结构信息和其内部地球物理属性信息经反演推断确定。
3全息三维联测概念与内涵
3.1全息三维的概念与内涵
过去的三维往往只有3层,不具备结构化,因此不能叫全息。具备结构化,首先对象化,其次是要要分层分类,再次要有实体化。实体就是对象,三维就是实体对象的空间结构。三维建模就是对空间实体对象的结构建模。
全息就是空间实体对象的表面的光谱属性信息及其内部地球物理属性信息(如电性、磁性、音频等)。
全息三维就是空间实体对象的表面光谱特性信息及其内部的地球物理特性信息。
全息三维有4个特点:
1)真实化:更精细、更精确、更真实;
2)智能化:全自动智能化生产,自动建立全息三维,突破多要素自动分类提取的难题;
3)结构化:分层、分类要有结构性,而且管理到实体;
4)高效化:实现效率提高,一测多用,应用范围大大拓宽。
3.2迅捷联测的概念与内涵
近年来,测绘技术与地球物理探测技术都取得重大进步:三维激光扫描技术、高光谱成像技术、瞬变电磁探测技术、多波束扫描测深技术等新技术的发展较大地缓解了大数据时代的数据需求。但是,还存在着以下不足:
三维激光扫描技术能快速获取高密度激光点云,从而能解算出实体对象的空间三维姿态,但是不能获取目标的光谱属性信息,也不能获取实体对象内部地球物理特征信息;高光谱成像技术能获取实体对象的光谱属性信息,但是不能快速得到空间目标的三维姿态,也不能获取实体对象内部地球物理特征信息;三维激光扫描与大幅面数字相机积木式综合集成能解决同步获取实体对象的三维姿态和光谱属性,探索复合联测的技术路线,极大地提高同步联测的效率,但是不能解决像元与激光点云精确匹配问题,精度提升困难,不能获取实体对象内部地球物理特征信息;地球物理探测技术能获取实体对象地球物理属性信息,但是存在钻孔数据多解性问题,以及三维地质建模与测绘数据精确匹配问题;船载激光扫描与多波束测深综合集成技术能同步获取江河、湖泊、潮间带水下地形数据与岸上地形数据,但是如果岸边环境恶劣则不能使用,且水际线附近数据品质非常差;机载绿色激光能探测浅水域水下地形,也能探测岸上地形信息,但是由于蓝绿激光波长在480~570 nm,存在光斑较大而造成精度差;高分辨率大幅面数据相机成像对于特定光学波段的伪装目标不能识别,全波段高光谱成像能通过不同波段目标成像对比揭露伪装,但是数据量大,且解算方法智能化效率仍需提高;移动互联网、大数据、云计算、物联网、智能机器人设备是支撑真三维全矢量数字地球技术的物质基础,但是,基于点云特征智能提取的点云分类技术、三维矢量模型金字塔智能建模技术、海量不同尺度地表数据融合技术、智能自由凹边界三角剖分技术、三维矢量模型智能拓扑一致分析技术、三维智能地质建模技术仍是制约发展的瓶颈;缺少快速、简洁、智能、同步、高效的数据获取理论支撑,缺少同时获取空(空中)、地(地下)、水(水下)、陆(地面)实体对象的技术措施;三维空间实体对象的光谱维属性数据和地球物理特性数据基于时间序列演变的多维空间建模方法仍缺少理论基础与支撑。
为了快速、简洁、高效获取海量全息三维数据,需要引入迅捷联测的概念。迅捷就是全息三维数据获取快速、简洁、高效,数据要素自动分类提取,智能结构建模。
联测是相对传统的专项勘测而言,是指一次勘测能同步获取多类属性的信息,即包括不同空间对象同类信息的同步获取,如陆上地形信息与水下地形信息同步勘测的水陆联测,也包括同一空间对象不同类信息的同步获取,如同步获取空间对象的三维空间结构信息和光谱属性信息的光谱联测。
迅捷联测是指快速、简洁、高效、同步获取多类属性信息,数据要素自动分类提取,智能结构建模。迅捷联测有4个特点:
1)快速化:用动态探测技术替代静态探测技术,借助高效探测平台快速获取实体对象全息三维数据;
3)简洁化:数据采集无人化,数据处理自动化,数据建模智能化;
4)复合化:空地水陆多介质立体空间、多目标实体对象一体化勘测。
4迅捷联测方法与物理模型
为快速同步获取空中、地面、地下和水下空间实体目标的空间姿态、光谱属性和地球物理属性信息,需采用迅捷联测的勘测方法[3],物理结构如图1所示。

图1 迅捷联测系统物理结构


图2 激光高光谱共光路物理模型
4.2水陆联测物理模型
机载双频激光雷达水陆联测技术是利用机载激光器发射和接收蓝绿和红外激光,探测水底深度、水下目标和陆地地形的一种先进的遥测技术。虽然蓝绿激光可以对陆地实施探测,但其频率难以增加,降低了探测速度,而红外激光可以快速对陆地实施探测,但无法穿透水体,因此,将两者结合使用,可以实现水下和陆地的联合快速探测[4]。机载水陆联测原理如图3所示。机载双频激光水陆联测物理模型如图4所示。
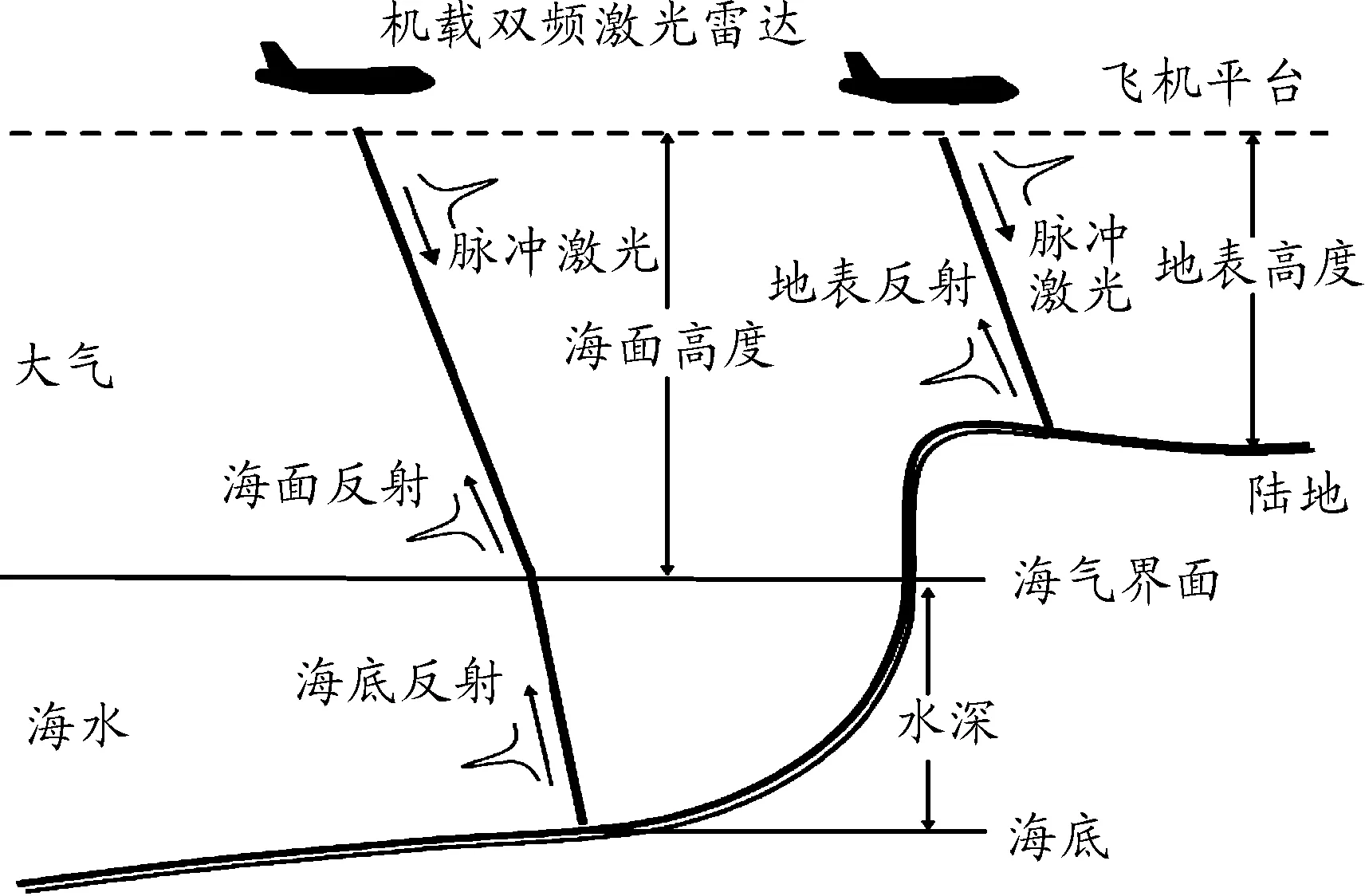
图3 水陆联测原理
4.3逆合成孔径瞬变电磁探测物理模型
瞬变电磁探测利用不接地回线向地下发射一次脉冲磁场,在一次脉冲磁场间歇期间利用线圈或接地电极观测地下介质中的二次感应涡流场,从而探测地下实体目标电阻率[5],探测原理如图5所示。地空瞬变电磁探测是在地面设置电磁发射源和空中探测平台差分导航基站,运用空中平台进行探测[6],其物理模型如图6所示。
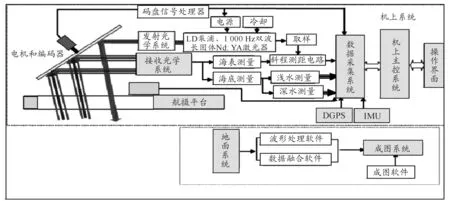
图4 机载双频激光水陆联测物理模型

图5 逆合成孔径瞬变电磁探测原理
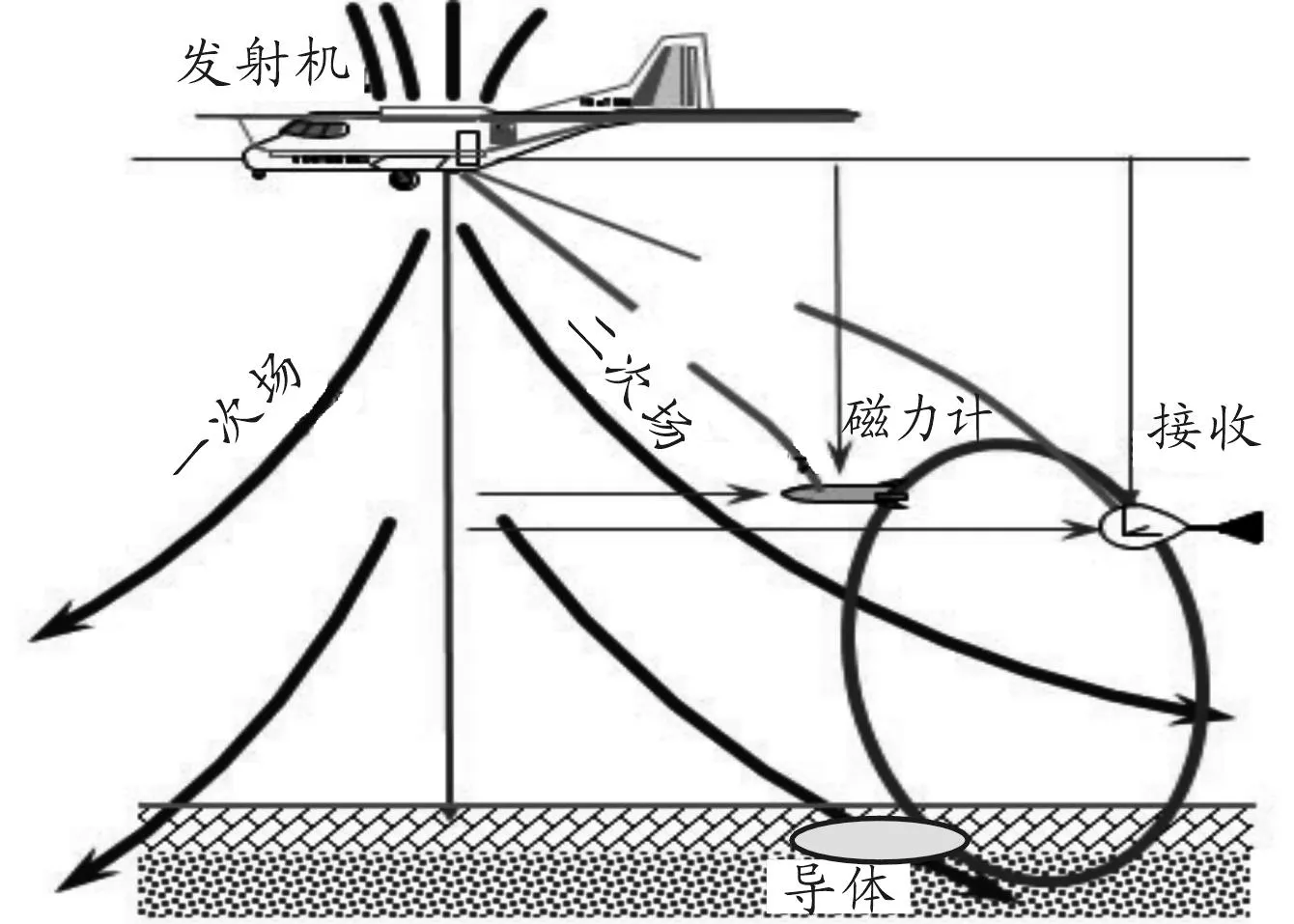
图6 逆合成孔径瞬变电磁探测物理模型
5全息三维数学模型
5.1构建海量数据集合
5.1.1构建海量激光雷达@多波束点云数据集合
激光雷达@多波束测深系统获取的均为实体目标表层高密度点云数据,用于描述实体目标的空间姿态。
设实体对象空间姿态点云的集合为o,则:
互联网的兴起造就了电子商务时代,并改变了人们日常的生活方式,包括沟通方式、娱乐方式、购物方式、支付方式、学习方式等。2017年8月中国互联网络信息中心(CNNIC)发布第42次《中国互联网络发展状况统计报告》显示:“截至2018年6月,中国网民规模达到8.02亿,占全球网民总数的五分之一,互联网普及率为57.7%,超过全球平均水平;互联网为代表的数字技术正在加速与经济社会各领域深度融合,成为促进我国消费升级、经济社会转型、构建国家竞争新优势的重要推动力。”①
(1)
o为激光点云集合;Ni为第i点的点号;xi,yi,zi为第i点空间坐标。
5.1.2建立高光谱数据集合
高光谱数据有BSQ、BLP以及BIP三种格式。BSQ高光谱数据为ik(xi,yi,rk,Gk,Bk,k,α)(1≤k≤L,1≤xi≤M,1≤yi≤M)表示第k波段空间位置为(xi,yi)的像素(rk,Gk,Bk),其中L为波段数,M与N分别为波段的高度与宽度,α为反射系数。
设BSQ高光谱数据集合为i,则:
(2)
(3)
设rU,V表示波段U与V之间的相互关系数,则
(4)
5.1.3构建地下实体目标钻孔数据集合
地下实体目标的地球物理属性数据包括密度、磁性、电性、弹性、放射性等物理性质,通常通过研制物理性质的差异为基础来确定其类别。物理性质数据由采集手段确定。
逆合成孔径地空瞬变电磁探测地下介质获取的数据:地面坐标,深度,衰减时间,电阻率。
设地下实体目标钻孔数据集合为j,则:
(5)
5.2创建全矢量三维数字表面模型
1)激光点云与高光谱数据融合。激光与光谱数据融合流程如图7所示,融合方法如下:
步骤1:处理GPS和IMU数据,将GPS和IMU数据与事件记录文件对应,找出飞行试验段的GPS数据,并对应到激光测点处;
步骤2:根据内部时间记录,对GPS+IMU数据、编码器数据、激光测量数据进行同步化和配准,将坐标和姿态数据差值到每个点云数据中;
步骤3:根据内部时间记录,对GPS+IMU数据、CCD数据进行同步化和配准,将坐标和姿态数据差值到每个CCD像元数据中;
步骤4:通过坐标和姿态,将激光测点与CCD像元进行配准;
步骤5:合并和生成三维高光谱点云数据。

图7 激光与高光谱数据融合方法
2)全矢量三维数字表面模型。全矢量三维数字表面模型是针对现有以DEM+DOM为核心的数字平台存在的缺陷,实现海量的、激光点云、线、面构成的全矢量三维模型的动态加载、显示、漫游、缩放的数字平台。矢量三维数字表面模型平台具有的核心功能:动态加载、显示、漫游、缩放、浏览海量矢量三维不规则三角网地表模型;支持在三维地球不规则地表上实现实时切割与开挖分析;支持在三维地球显示任意海量电力线路走廊的三维矢量点云数据;支持实现三维地球上动态加载显示任意线路的三维电力线路及铁塔矢量模型;支持实现三维地球地表模型与影像的半透明显示;支持在三维地球上进行三维地质剖面建模与显示;支持在三维地球上显示三维矢量文字、矢量标注与矢量CAD图形等;支持在三维地球上进行水流动、下雨、冒烟、起火等自然景观三维仿真模拟;支持在三维地球不规则三角网地表模型上进行各种局部点或子区域的变形实时显示、仿真分析等。因此,全矢量三维数字表面模型是全新的三维数字平台技术,将推进三维数字地球平台技术在各行业的数字化、可视化应用领域取得实质性的进展。
5.3创建三维智能地质模型

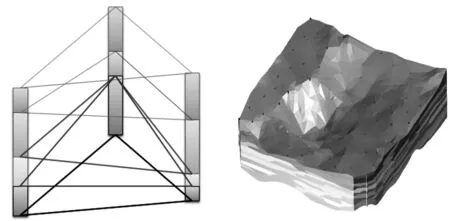
图8 用边界层表示地质模型图
在地质分层表面模型上叠加DEM和DOM数据,采用同样的方法,可以对地表模型与地下地质模型叠加。若地表模型和地下地质模型采用同样的坐标参数,则只要将两数据统一导入到一个展示平台,系统将自动实现无缝拼接;若地表模型和地下地质模型采用的是不同的坐标参数,通常在地质模型生成初,将其对应的钻孔数据,按照影像数据的坐标参数转换为统一坐标参数下,三维智能地质模型效果如图9所示。

图9 三维智能地质模型
6勘测效能评估
6.1勘测效能模型
本文利用指数法研究全息三维联测方法效能。由于勘测系统的结构及功能具有相似性,因此根据工程物理学中的相似理论与量纲分析,建立度量勘测系统内部效能指数的白金汉方程。该方程具有如下形式:
(6)
其中:C为常系数,iKC表示勘测系统内部效能指数,各π项是由量纲分析导出的准则方程。这些准则是由勘测系统的各种物理参数通过代数符号联结成的无因次参数群。
在勘测系统指数分析中,影响勘测效能的因素主要有:勘测时间、安全性、勘测人数和勘测效果。从综合反映勘测系统能力角度考虑,影响勘测指数的主要因素有:勘测时间(SJ )、勘测效果(XG )、安全性(AQ )、勘测人数(RS )。在影响因素排序上,勘测效果与勘测速度并重,勘测人员使用与勘测时间影响安全性,通过量纲分析及专家分析,勘测系统指数的数学模型如下:
(7)
6.2试验数据与对分析
试验条件:某区域正面宽度8 000 M,5 M等深线以浅至陆地纵深800 M,总面积6.4 km2的区域,水质清澈,符合蓝绿激光测深要求。
6.2.1常规勘测方法
勘测人数:27人,陆上勘测18人,水下勘测9人;
勘测时间:采用电子速测技术,运用无幅站勘测模式,分成3个小组,勘测速度1 km2/H,数据实时处理,总体勘测时间:6.5 H;
勘测效果:人工测量精度较高,地图精度能达到10分米;
安全性:人工现地作业,安全性低。
6.2.2全息三维联测方法
勘测人数:飞行控制1人,地面站1人,驾驶员1人,共3人;
勘测时间:勘测高度350 M,勘测宽度280 M,按800 M纵深,规划3条航线能覆盖全域。飞行速度180 km/H,勘测时间约20 min;试验时缺少数据实时处理软件,人工数据处理增加了3 H;
勘测效果:差分定位@惯性测量复合导航,测量精度在30 cm,陆地红外激光测量能达到每平方米10~20点,水下测量由于蓝绿激光光斑较大,测量点云密度较低,点云密度能能达到2~4点/M2,地图比例尺能达到1∶1 000,地图分辨率:0.1 m,这个密度经过数据处理能识别水下目标,基本满足使用要求。
安全性:采用无人化作业模式,安全性高。
6.3勘测效能评估计算
常规勘测方法iKCCG计算结果
C·300.4400.1/650.3810.2=0.698 8C
(8)
基于迅捷联测的全息三维联测方法iKCQX计算结果
(9)
通过常规勘测指数与三维全息联测指数对比,计算得出勘测效能评价指数。
(10)
即:采用基于迅捷联测三维全息联测方法比常规勘测方法效能提高2.584 6倍。
7结语
运用全息三维能准确描述实体对象的空间结构、表面光谱特性及其内部的地球物理特性信息,同地面模型相比较,描述更精细、更真实;运用迅捷联测的勘测方法能快速、简洁、高效、同步获取多类属性信息,勘测效率有很大的提高。通过东山岛海域机载双频激光雷达水陆联测实验、南京治山的地空探测实验、孟津黄河白鹤段的船载水陆联测实验,以及在南京开展的激光高光谱联测试验,验证了全息三维联测具有可行性。当前的全息三维联测水平同专项勘测相比较效能提高到2.584 6倍,未来仍有较大提升空间。可以说,全息三维迅捷联测是互联网+时代对大数据强烈需要和发展的产物,是未来勘测方法的发展方向。
参考文献:
[1]付成群,律秀原,王勇.机载激光雷达海洋探测的模拟研究[J].系统仿真学报,2015,27(5):1038-1043.
[2]李貅,张莹莹.地空瞬变电磁系统的发展历程与新进展[C].2014年中国地球科学联合学术年会-专题24:浅地表地球物理进展论文集,北京:出版地不详,2014.
[3]付成群,律秀原,王勇.水陆视景快速联测系统[J].四川兵工学报,2013,182(9):82-85.
[4]付成群,宫云祥,余勤,等.低空高分辨率水陆视景联测系统[C]//第十五届海峡两岸地貌学研讨会,南宁:出版地不详,2014.
[5]戚志鹏.瞬变电磁三维合成孔径延拓成像方法研究[D].西安:长安大学,2011.
[6]姚伟华,赵威,李貅,等.基于两层含水采空区瞬变电磁场数值模拟的拟地震偏移成像[J].物探与化探,2015,39(1):125-131.
(责任编辑杨继森)
本文引用格式:付成群,方亮,谢立军,等.基于迅捷联测的全息三维联测方法[J].兵器装备工程学报,2016(5):123-128.
Citation format:FU Cheng-qun,FANG Liang,XIE Li-jun,et al.Method of Three-Dimension Holographic Joint Survey Based on Quick Joint Survey[J].Journal of Ordnance Equipment Engineering,2016(5):123-128.
Method of Three-Dimension Holographic Joint Survey Based on Quick Joint Survey
FU Cheng-qun,FANG Liang,XIE Li-jun,WANG Yong
(Engineering Institute of Engineering Corps,PLA University of Science and Technology,Nanjing 210007,China)
Abstract:To quickly acquire and reproduce the attitude,stratification,classification and its internal geophysical characteristics of the space entity object,on the basis of the three basic assumptions,this article introduced the concept and content of holographic three dimension simultaneous surveying,and it discussed the airborne dual frequency lidar scanning technology,laser-hyperspectral common path technology and transient electromagnetic underground and airborne detecting technology in theory,and the quick joint survey physical models and three dimension holography mathematical models were established,and it discussed airborne and overland simultaneous surveying technology,submarine and overland simultaneous surveying technology and holographic three-dimensional modeling in the application.The theory and method of airborne and overland simultaneous surveying,spectral simultaneous surveying,submarine and overland simultaneous surveying,underground and airborne detecting are closely related on the detection method,and are complement to each other in the detecting object,thus forming a three-dimensional holographic joint measurement method.
Key words:three dimension holography; quick joint survey; physical model; mathematical model
doi:【信息科学与控制工程】10.11809/scbgxb2016.05.030
收稿日期:2015-11-10;修回日期:2015-12-15
基金项目:国家863计划项目资助(2014AA7042011)
作者简介:付成群(1975—),博士,副教授,主要从事工程侦察与指控研究。
通信作者:方亮(1983—),工程师,主要从事测绘工程和战场感知研究。
中图分类号:E917
文献标识码:A
文章编号:2096-2304(2016)05-0123-06
