核环境机器人现状及关键技术分析
2016-06-15杜树标蒋韦韦
杜树标,蒋韦韦,丁 泮
(1.中国兵器工业第五八研究所,四川 绵阳 621000;2.大亚湾核电运营管理有限责任公司,广东 深圳 518120;3.海南核电有限公司,海南 昌江 572700)
核环境机器人现状及关键技术分析
杜树标1,蒋韦韦2,丁泮3
(1.中国兵器工业第五八研究所,四川 绵阳621000;2.大亚湾核电运营管理有限责任公司,广东 深圳518120;3.海南核电有限公司,海南 昌江572700)
摘要:针对我国近年来研制的多款核环境机器人现场应用情况,分析当前核环境机器人发展急需突破的抗辐照设计、可靠通信等关键技术,总结了敏感元器件单体屏蔽、集成电路整体屏蔽等抗辐照加固方案,提出了机器人高频通信方法、中继通信方法以及机器人智能控制的主要改进方法。
关键词:核环境机器人;辐射探测;抗辐照
核安全重于泰山,核安全是核工业发展的前提,必须加强对核设施的安全管控,尤其是核电站、核废料处理厂的高反射性区域和系统,及时发现故障并完成故障处理。然而,故障处理环境往往是在高放射性区域,工作人员无法靠近,阻碍了故障处理进程,造成经济损失,甚至引发连锁故障,使得故障范围扩大危及核安全。若直接由工作人员进入完成对设备的检修、去污等工作,无疑会受到大剂量照射,危及人身安全。除此之外,核工业作业场所往往系统错综复杂,作业空间狭小,环境湿热,不方便工作人员直接进入检修。
随着工业技术的不断进步,由机器人完成高放射性环境下的工作成为可能,运用机器人开展高放射性区域的日常巡检,完成特种工作等。日本福岛核事故发生后,日本、美国先后派出Quince、Packbot、Warrior等多款机器人进入高放射性厂区执行现场检测以及相应操作任务,取得了不错的效果[1]。
作为核能发展大国,我国也越发重视核环境机器人的研发,投入大量资金及科研力量开展研究。本文结合我国核环境机器人现场应用情况,对现阶段我国核环境机器人发展进行总结,分析当前核环境机器人的关键技术,并提出相应解决方法。
1核环境机器人基本组成
现阶段研发的核环境机器人除特种作业机器人外,多为履带式、轮式、多足式遥控机器人,由机器人系统及远程终端组成,机器人系统以嵌入式控制系统为控制核心,配套图像采集系统、导航系统、运动控制系统和放射性检测等功能性系统,在现场执行检测和操作等任务,远程终端可实时接收机器人系统传回的现场图像、检测数据等信息,根据需要控制机器人运动路线和机械手臂执行相应任务,现场应用如图1所示。

图1 遥控机器人现场应用示意图
机器人基本组成如图2所示,图像采集系统是机器人的“眼睛”,一般采用抗辐照CCD相机拍摄现场图像,勘察现场情况并为操作者提供位置信息;导航系统通过超声波、雷达、红外等多种方式判断周围障碍物情况,提高机器人自身环境感知能力;运动控制系统主要受远程终端控制,通过其调整机器人姿态、行走路径以及控制机械手完成相应操作,同时运动控制系统也可根据导航系统的传感器信息调整行走路径,实现自动蔽障;机器人平台搭载辐射检测设备获取现场辐射信息,并将测量数据通过无线传输模块传送至远程终端。

图2 核环境机器人基本组成框图
2核环境机器人现状
鉴于核环境机器人在福岛核事故中发挥的重要作用,我国也加快了核环境机器人的研发。多个核工业企业、高校、科研院所牵头研发项目,中国广核集团、东南大学、北京理工大学、中国原子能科学研究院等单位成功研制了几款核环境专用机器人工程样机,部分机器人已在核电站进行了工程示范应用。目前我国研发的核环境机器人按用途大致分为特种作业机器人和辐射探测应急机器人[2]。本文主要以研制种类更多样的辐射探测应急机器人为重点进行论述。
2.1核环境特种作业机器人
针对核电站在役检查、核燃料更换等工作,科技部“核反应堆专用机器人技术与应用”课题研发了反应堆换料机器人、反应堆压力容器无损检测机器人、蒸汽发生器一次侧堵板操作机器人、反应堆整体螺栓拉伸机、核电站多功能水下爬行机器人、核电站微小型作业潜艇六款核环境特种作业机器人[3-4],部分已进行了现场应用。
1)反应堆整体螺栓拉伸机自动测量机器人[5]。该机器人系统用于实现核电站内压力容器多个螺栓在液压拉伸过程中的拉伸量以及残余拉伸量的自动测量,从而减少操作人员在辐射环境下的滞留时间,有效的降低其所吸收的辐射剂量,并提高系统整体的工作效率[5]。该机器人已在大亚湾核电站进行示范应用,取得良好效果。
2)蒸汽发生器一次侧堵板操作机器人。蒸汽发生器一次侧堵板操作机器人针对蒸汽发生器检修期间的操作实现远程控制,有效减少现场操作人员所吸收的辐射剂量。机器人系统通过视觉识别可在倾角为45°的蒸汽发生器入水孔端面上正常工作。可实现360°旋转,完成堵板安装的高可靠性自主作业[6]。解决了大扭矩螺栓拧紧、高精度视觉识别、拧紧规划与自主作业以及轻量化结构设计等关键技术,实现了蒸汽发生器一次侧堵板自动安装功能[5],保障了核电站放射性第二道屏障的完整性。
2.2辐射探测应急机器人
1)核辐射检测与应急机器人。中国原子能科学研究院与北京航空航天大学共同研发了核辐射检测与应急机器人[7],如图3所示,其主要技术指标如表1所示。该机器人采用履带式运动机构,机器人平台携带放射源“热点”成像装置,放射源“热点”成像装置可以清晰给出现场放射性污染程度的图像,相机可实现360°周向观测,-10°至+10°俯仰观测[5]。机器人控制系统采取稳定可靠的嵌入式设计,且具备冗余控制功能,采用有线+无线的通讯方式,可通过专用控制台和计算机分别控制。
2)SJTU特种机器人。上海交通大学特种机器人研究室研制的核工业机器人特别针对核电站、核燃料后处理厂及废水、废气、废渣处理厂等放射性环境现场,能够对核设施中的设备装置进行探测、维修等。如图4所示,其主要技术指标如表2所示。该机器人采用履带式车载机械臂基本结构,能够以半径为70 cm进行原地旋转,使用多摄像机、超声测距传感器等在内的传感器集成系统,具有双向力反馈能力以提供操作员环境力感信息[5]。

图3 核辐射检测与应急机器人

图4 SJTU特种机器人

序号主要技术指标项指标参数1最大爬坡角度30°2最高时速0.4m/s3本体质量80kg4最大载重25kg5可抓取质量10kg

表2 SJTU特种机器人主要技术指标
3)水下异物打捞机器人。中国科学院光电技术研究所研发的水下异物打捞机器人克服了高辐照环境下动静密封等关键技术,成为首台国内自主研发的水下异物打捞机器人。如图5所示,其主要技术指标如表3所示。机器人由水下爬行机、二维云台、机械手、清扫机、水下吸泵和控制器等组成,监控部分由电视摄像系统、图像压缩存储系统组成。其中机械手用于处理体型较大的坠落物,例如螺丝刀等;清扫机可以清理体积较小的物品,例如螺丝等;水下吸泵用于微小物体清扫,例如:粉渣等。该机器人系统设计为多学科交叉融合,集光学、自动控制、精密机械、信息处理技术和系统集成于一体[5,8]。

图5 水下异物打捞机器人

序号主要技术指标项指标参数1最大爬坡角度30°2最高时速9m/min
4)中辐院辐射探测机器人。中国辐射防护研究院研制了一种能够在环境γ剂量率不高于100 Gy/h的强辐射场中进行探查作业的六轮式遥控探测机器人。如图6所示,其主要技术指标如表4所示。该机器人由行走机构、电动云台以及探测设备3部分组成,其中两只前轮可垂直摆动90°,提高遥控探测机器人翻越障碍的能力。

图6 中辐院辐射探测机器人
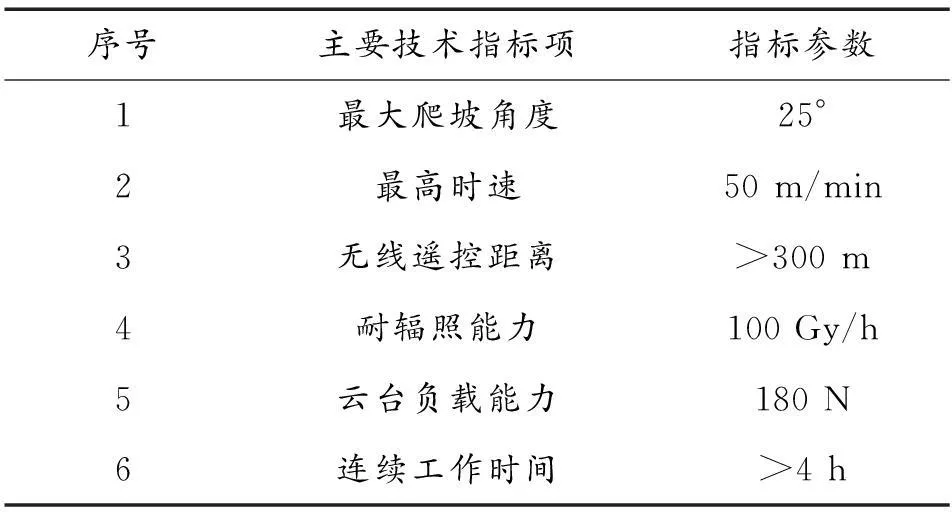
序号主要技术指标项指标参数1最大爬坡角度25°2最高时速50m/min3无线遥控距离>300m4耐辐照能力100Gy/h5云台负载能力180N6连续工作时间>4h
该机器人采取了有线、无线两种通讯方式进行远程控制,能够实时反馈强辐射环境现场的场景图像和辐射信息。探测设备由耐辐射摄像机和高压电离室组成,高压电离室的可测最大剂量率为100 Gy/h,工作时把耐辐射摄像机安装在遥控探测机器人的电动云台头关节顶端,通过控制电动云台3个关节的转动实现摄像机对场景的多方位拍摄,遥控探测引导机器人现场作业,配合高压电离室使用可方便直接寻找放射性热点,了解事故现场情况[9]。
5)东南大学核化探测机器人。东南大学联合多单位研发的核化探测机器人如图7所示,其主要技术指标如表5所示。该机器人配备摄像头、超声波和红外测距传感器、无线通信系统、核辐射探测仪等,具有体积小、重量轻、机动能力强等特点[10],可深入高毒高危作业区域,执行核辐射、化学、生物污染的探查和取样,执行紧急任务[11]。

图7 东南大学核化探测机器人
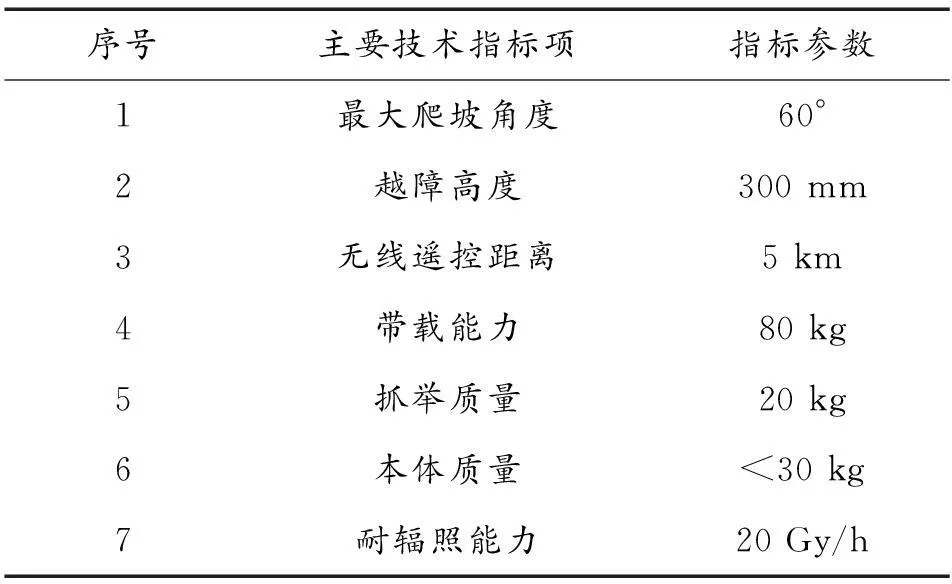
序号主要技术指标项指标参数1最大爬坡角度60°2越障高度300mm3无线遥控距离5km4带载能力80kg5抓举质量20kg6本体质量<30kg7耐辐照能力20Gy/h
3关键技术分析
通过近年的着力研发,我国核环境机器人已取得一定成果,但在试验和应用过程中也暴露了一些问题,部分关键技术仍急需解决。
3.1核环境机器人抗辐照技术
核环境机器人耐辐照能力至关重要,在福岛核事故救援过程中,日本Quince 1号机器人就因辐射剂量过大“照死”在反应堆厂房无法收回[12]。核环境机器人耐辐照能力主要取决于其部件材料耐辐照性能,尤其是对辐射最为敏感和脆弱的控制电路、电子器件等,一般电子部件在累积计量达到10Sv时性能开始下降。比较昂贵的解决方式是采用CMOS集成电路技术(SOS技术)和在合成蓝宝石绝缘衬底上、在绝缘衬底上形成单晶硅制作数字电路和模拟电路技术(SOI技术)[9]。对于中小规模的集成芯片,也可通过辐照环境筛选器件以及抗辐射材料屏蔽等方式减小环境辐射影响,但需要尽可能减小屏蔽结构给机器人带来的“死重”,减小对机器人灵活性的影响。
以核环境机器人通常配备的CCD相机为例,其主要由CCD传感器、FPGA集成电路等电子器件构成,在辐射环境中CCD传感器及集成电路都会产生缺陷,造成工作异常或故障[13],普通CCD相机辐照剂量超过200 Gy时无法工作[14],如图8。

图8 CCD传感器辐照试验结果
敏感部件高度集成化、模块化设计;电子元器件进行辐照试验筛选;钨、铅等耐辐照材料加固屏蔽电子元件;电路整体屏蔽加固,如图9所示。

图9 屏蔽加固方案
试验表明:通过抗辐射加固的半导体器件耐辐照能力可达10 kSv[13]。目前核环境机器人研发过程中,各研发单位抗辐照设计方案优劣各异,缺少抗辐照模块化、标准化接口设计和即插即用的软硬件模块辐射加固设计[1],必须减少研发成本,缩短研发时间。
3.2核环境机器人可靠通信技术
除抗辐照的特殊要求外,机器人系统与远程控制终端的可靠通讯也是当前核环境机器人发展面临的关键问题。
现场信息采集是核环境机器人的重要功能,现场信息的有效传回对应急救援决策至关重要。由于机器人作业的放射性控制区墙体为厚度1.5~2 m的混凝土,对无线通信信号有极强的屏蔽,机器人系统无法与远程终端建立可靠的无线通信[15]。若采用有线通信,控制区复杂的现场环境极易引起通信线缆缠绕,影响机器人行进和工作。针对这一问题,主要采用三方面措施:通信线缆防缠绕设计;发展高频无线通信;机器人系统与远程终端间增加通信中继[16]。
在福岛事故救援中表现突出的美国Packbot机器人采用有线+无线的混合通信方式,无线通信距离800 m,同时机器人配备200 m通信线缆,在无线通信不可用情况下,使用有线通信。其通信单元设计的线缆卷轴器是防止线缆缠绕的关键,卷轴器控制系统能够根据机器人的行径自动支出和重绕线缆,尽可能减小线缆缠绕,并防止线缆过度拉紧造成通信故障[17],如图10所示。另外,packbot可根据应用需要,配备2.4 GHz或4.9 GHz频段全向天线[18],增强信号的穿透能力。我国核环境机器人无线通讯通常是2.4 GHz及以下频段,需要开展更高频段通信研究,以满足特殊应用环境。

图10 Packbot机器人通信单元
同样参与福岛核事故救援的日本Quince 2号机器人采用光纤连接器和中继器的模式,可实现2 km通信距离,同时提高了通信可靠性[19],如图11所示。

图11 机器人中继通信示意图
3.3核环境机器人智能控制技术
结合应用需要,核环境机器人逐渐从单一机器人、单一功能、简单控制向多机器人协同、复合功能、智能控制方向发展。机器人导航系统配备超声波、雷达、红外、陀螺仪等多种传感器增强机器人的环境感知能力,通过传感器信息融合、图像信息处理,判断现场环境进而实现自主控制[20-21]。同时,机器人平台搭载的CCD相机、辐射探测器、气体探测器、爆炸物探测器及机械手臂等,操作者结合传感器综合信息及任务需求控制机器人运动和机械手操作。机器人的自主控制与远程终端控制高效结合,同时多机器人协同配合实现智能控制也是当前核环境机器人发展的关键技术。智能控制主要有以下方法:
1)优化机器人基于多传感器数据的导航算法,实现合理的实时路径规划[22-23],增强多参数之间的自适应协同控制;
2)多机器人数据信息共享,提高远程终端协同控制能力;
针对机器人的智能控制,目前有传统PID控制、神经网络控制、模糊控制、自适应鲁棒控制、灰色理论控制等多种算法,复合算法研究也在开展,均有不同程度应用。快速、可靠的控制算法是提高机器人智能控制程度的关键。
多机器人数据共享,充分利用多机器人、多传感器数据信息,建立空间信息与时间信息互补关系,模拟出更贴近实际的现场环境[24-25],提高控制精度和效率,实现核环境机器人在复杂环境中的智能控制。
4结论
本文总结了我国近年研制的多款核环境机器人技术性能及实际应用情况,分析当前核环境机器人仍需解决的关键技术,包括核环境机器人抗辐照技术、可靠通信技术、智能控制技术等,提出了相应技术方法。
参考文献:
[1]QIAN H H,XU Y S,XU W F.The State-of-arts and Key Technologies for Telerobotics in Nuclear Applications[C]//Proceedings of the 32nd Conference,2013:6016-6017.
[2]廖韩林,赵毅,李清鹏.核化高危环境侦察机器人[C]//2013中国指挥控制大会论文集,2013:558.
[3]仪器.我国核反应堆专用机器人研发取得技术进展[J].军民两用技术与产品,2014(12):29.
[4]师帅.我国成功研发六款核反应堆专用机器人[J].电苑杂谈,2015,23(9):50.
[5]杨阳.整体螺栓拉伸机自动测量机器人系统设计与实现[D].北京:北京理工大学,2015(1):4-6.
[6]DUAN X G,YANG Y.Control System for Blocking Plate Manipulation Robot Based on Visual Servo[C]//13th International Conference on ICIA.IEEE,2013:326-333.
[7]李怀兵,张韬懿,丑武胜.核辐射探测与应急处理机器人的小型机械臂系统设计[J].高技术通讯,2011,21(1):101-105.
[8]窦普,廖礼斌,张志刚.基于μC/OS-Ⅱ水下异物打捞机器人控制系统的设计[J].计算机测量与控制,2014(7):31.
[9]沈亚华,朱万宁,董强敏.耐强辐射遥控探测机器人研制[J].核电子学与探测技术,2015,35(1):75.
[10]崔建伟.东南大学研制成功小型核化探测与应急处理遥操作机器人[J].机器人技术与应用,2012(1):45.
[11]凌军辉.中国防核化机器人[J].国事,2012:32.
[12]刘波,王欣.机器人在核与辐射事故应急中的应用展望[J].工业安全与环保,2015,41(1):63-64.
[13]郭永飞.遥感CCD相机的抗辐射策略研究[J].中国光学与应用光学,2010,3(6):538-539.
[14]刘呈则,严智,邓景珊.核电站应急机器人发展和技术研究[J].核科学与工程,2013,33(1):98,102.
[15]徐文福,毛志刚.核电站机器人研究现状与发展趋势[J].机器人,2011,33(6):763-764.
[16]孙奇.无线协同中继通信系统的传输技术研究[D].北京:北京邮电大学,2014:3-4.
[17]iRobot Corporation.irobot 510 Packbot CBRNe products introduction[EB/OL].[2015].http://www.irobot.com.
[18]iRobot Corporation.irobot Packbot Accessories One Robot Unlimited Possibilities[EB/OL].[2015].http://www.irobot.com.
[19]刘振景.辐射场数据采集及无线传输处理[D].哈尔滨:哈尔滨工程大学,2009:15.
[20]张明路,彭平,张小俊.特殊环境下服役机器人发展现状及其关键技术研究[J].河北工业大学学报,2013,42(1):73-74.
[21]宋伟科.基于多机器人的开放式智能控制系统关键技术研究与开发[D].天津:天津大学,2012:10-11.
[22]卫光,倪靖滨,白玉磊.浅谈核工业机器人及其自控与遥控切换技术[J].科技导向,2015(2):83.
[23]丑武胜,刘源,杨光.核辐射探测机器人故障容错控制方法研究[J].博士论坛,2010,10(2):1-2.
[24]王俊,徐宏庆,王高山.多模式无线传感器机器人的研究与设计[J].电子技术应用,2014,40(10):84-85.
[25]郭崇滨.并联机器人多目标协同智能控制研究[D].上海:东华大学,2013:14-15.
(责任编辑杨继森)
本文引用格式:杜树标,蒋韦韦,丁泮.核环境机器人现状及关键技术分析[J].兵器装备工程学报,2016(5):93-97.
Citation format:DU Shu-biao,JIANG Wei-wei,DING Pan.Status and Key Technologies Analysis for Robot in Nuclear Applications[J].Journal of Ordnance Equipment Engineering,2016(5):93-97.
Status and Key Technologies Analysis for Robot in Nuclear Applications
DU Shu-biao1,JIANG Wei-wei2,DING Pan3
(1.No.58 Research Institute of China Ordnance Industries,Mianyang 621000,China;2.Daya Bay Nuclear Power Operations and Management Co.,Ltd.,Shenzhen 518120,China;3.Hainan Nuclear Power Co.,Ltd.,Changjiang 572700,China)
Abstract:Based on the practical performance of nuclear application robots developed in China in recent years,the key technologies of the current robots such as radiation resistance and reliable communication were studied.This paper summarized the sensitive components and integrated circuit radiation resistance scheme and put forward the communication and intelligent control measures.
Key words:nuclear application robot; radiation detection; radiation resistance
doi:【信息科学与控制工程】10.11809/scbgxb2016.05.023
收稿日期:2015-11-12;修回日期:2015-12-20
作者简介:杜树标(1987—),男,硕士,主要从事核辐射监测技术研究。
中图分类号:TP24
文献标识码:A
文章编号:2096-2304(2016)05-0093-06
