基于免疫遗传算法的AGV路径规划方法研究
2016-06-12井治财史恩秀
井治财 史恩秀
【摘要】论文基于遗传学和免疫学的特点,提出了一种基于免疫遗传算法AGV路径规划方法。算法采用实数编码,且采用不定长度,定义的适应度函数具有明确的物理意义。所设计的路径规划方法具有遗传算法具有的搜索空间大等优点,也具有免疫算法对抗原的识别、学习、记忆和自动调节能力,克服了遗传算法易陷入局部最优的缺陷,进化速度也得到了提高。仿真结果证明该算法能较快地为AGV产生一条适应所处环境的无碰撞的最优路径。
【关键词】自动导航小车;路径规划;免疫遗传算法;疫苗
1、引言
目前,为使移动机器人规划出良好的去去路径,所用的方法很多,如栅格法[1]、势场法[2]、可视图法[3]等。但各种方法有其使用局限。人工智能的发展为AGV的路径规划提供了新思路,产生了诸如神经网络学习法、遗传算法等方法。这些算法在一定程度上解决了AGV的路径规划问题,但也有其缺陷。如神经网络学习法对于复杂环境难以数学建模,范化能力差;模糊法灵活性差。遗传算法在迭代过程中,个体在进化过程中不可避免地会产生退化。受生物免疫系统的启发,论文将免疫引入到遗传算法中,在保留遗传算法优点的情况下,利用待求问题的一些特征信息,采用免疫方法所具有的识别、记忆等功能来抑制遗传算法在进化中所出现的退化现象。本文所设计的基于免疫遗传算法的AGV路径规划方法利用AGV在移动过程中的特殊信息对所选路径进行优化,可较快地使AGV根据环境信息搜索一种满意的路径,提高了AGV路径规划的智能性。
2、环境信息建模
对AGV进行路径规划前,应解决对其环境信息的描述即环境建模问题。为此,作以下假设[3]:
(1)AGV在二维平面中运动,不考虑其高度方向的信息;(2)规划环境的边界及其内所有障碍物(妨碍AGV运动的所有物体)用凸多边形表示。(3)考虑到AGV的大小等,对环境边界进行缩小和对障碍物进行扩大时,其缩放量为AGV外形最大尺寸的一半。即AGV为“点机器人”。
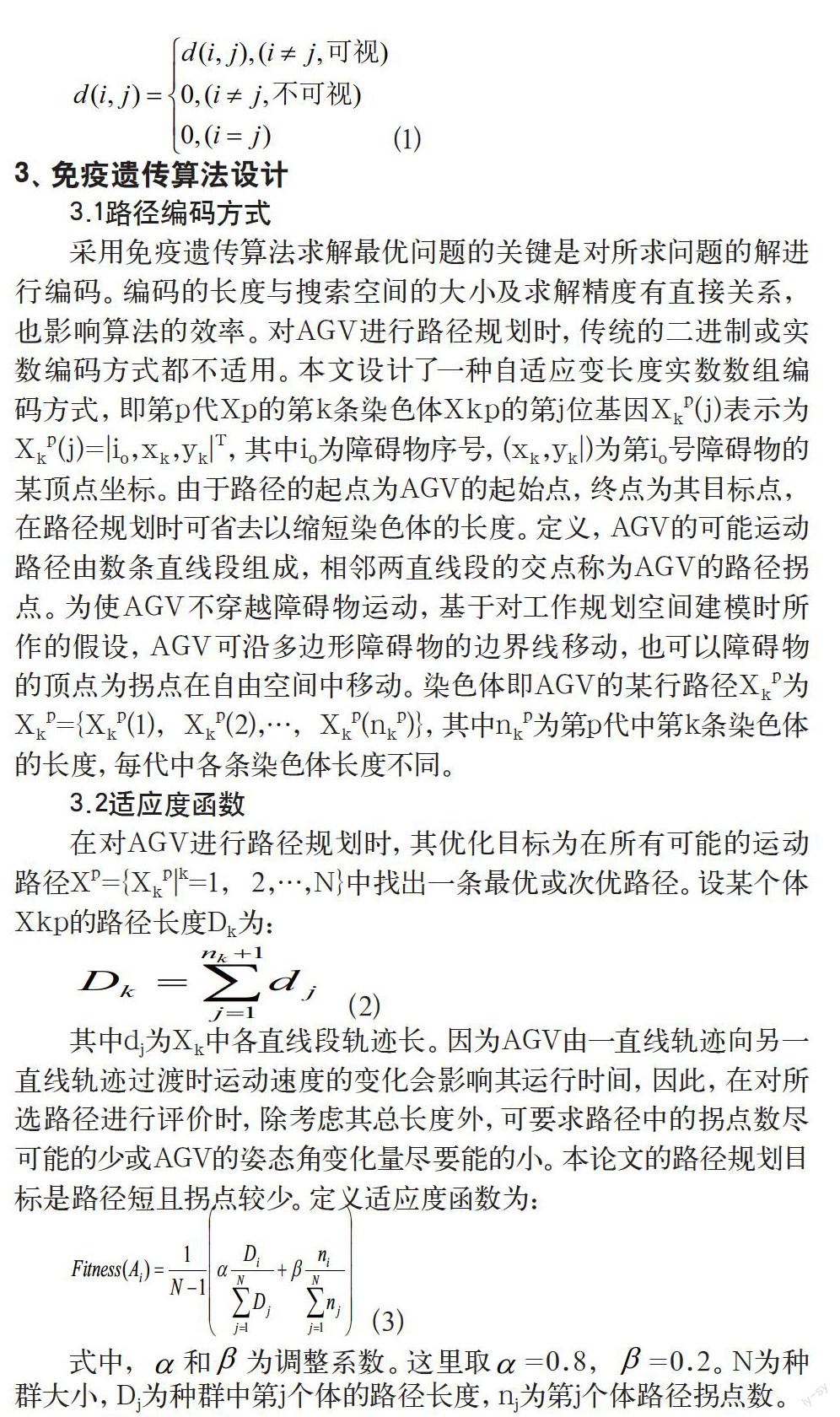
至此,AGV的工作空间可描述为:工作平面和障碍物群{Oi|i=1,2…N}。具体到其个障碍物Oi,可描述为Oi={顶点1坐标(xi1, yi1),….. 顶点n坐标(xni, yni)}。为方便数据处理,对多边形顶点沿顺时针方向编号。起点为S,终点为E。工作平面可表示为矩形{(Xmin,Ymin),(Xmax,Ymax)}。
设在AGV的工作环境中有n个已知的障碍物Oi(i=1,2,...,n),对应的顶点数为Si,顶点坐标为(x(i,j),y(i,j))(j=1,2,…Si)。为描述AGV工作环境中的障碍物,采用Dm×m矩阵对环境信息进行描述,其中,m为障碍物顶点总数。定义d(i,j)为:
3、免疫遗传算法设计
3.1路径编码方式
采用免疫遗传算法求解最优问题的关键是对所求问题的解进行编码。编码的长度与搜索空间的大小及求解精度有直接关系,也影响算法的效率。对AGV进行路径规划时,传统的二进制或实数编码方式都不适用。本文设计了一种自适应变长度实数数组编码方式,即第p代Xp的第k条染色体Xkp的第j位基因Xkp(j)表示为Xkp(j)=|io,xk,yk|T,其中io为障碍物序号,(xk,yk|)为第io号障碍物的某顶点坐标。由于路径的起点为AGV的起始点,终点为其目标点,在路径规划时可省去以缩短染色体的长度。定义,AGV的可能运动路径由数条直线段组成,相邻两直线段的交点称为AGV的路径拐点。为使AGV不穿越障碍物运动,基于对工作规划空间建模时所作的假设,AGV可沿多边形障碍物的边界线移动,也可以障碍物的顶点为拐点在自由空间中移动。染色体即AGV的某行路径Xkp为Xkp={Xkp(1), Xkp(2),…, Xkp(nkp)},其中nkp为第p代中第k条染色体的长度,每代中各条染色体长度不同。
3.2适应度函数
在对AGV进行路径规划时,其优化目标为在所有可能的运动路径Xp={Xkp|k=1, 2,…,N}中找出一条最优或次优路径。设某个体Xkp的路径长度Dk为:
其中dj为Xk中各直线段轨迹长。因为AGV由一直线轨迹向另一直线轨迹过渡时运动速度的变化会影响其运行时间,因此,在对所选路径进行评价时,除考虑其总长度外,可要求路径中的拐点数尽可能的少或AGV的姿态角变化量尽要能的小。本论文的路径规划目标是路径短且拐点较少。定义适应度函数为:
式中,和为调整系数。这里取=0.8,=0.2。N为种群大小,Dj为种群中第j个体的路径长度,nj为第j个体路径拐点数。
3.3算法的实现
在进行路径规划时,首先判断AGV从起点向终点沿直线轨迹运动时是否穿越障碍物。若无障碍物,两点间的连线为AGV的最佳运动路径,无须进行路径规划。否则进行路径规划。
免疫遗传算法中,疫苗是根据待求问题的先验知识构造的最佳个体基因的估计,抗体是根据疫苗将某个体基因进行修正后所得到的新个体。论文所设计的基于免疫遗传算法的路径规划过程如下:
(1)根据问题从记忆抗体库中提取问题的抗体P得到初始种群 ,不足N个时在AGV起始点和目标点之间随机产生N-P条路径。个体的产生方法是:以包围AGV的起点、终点和所有在线障碍物的最小矩形为规划区域,在规划区域内的障碍物顶点个数为M,在线障碍物为m,则染色体的最大长度为M-m。以规划区域内的障碍物顶点为被选对象,沿一定的条件随机选取基因位上的基因组成一条染色体,同用样的方法产生其它染色体以组成群体。
(2)根据先验知识抽取疫苗H={h1, h2, …, hm};
(3)計算第p代种群Ak所有个体的适应度,并进行终止进化判断。
(4)对当前群体Xp进行遗传算子操作得到子代群体Bp。进行交叉操作时,采用单点交叉。交叉操作时,两个个体若有相同的基因(而非等位基因)进行交叉操作。当相同基因位不止一个,随机选择其一进行交叉;当无相同基因位则不进行交叉。进行变异操作时,从个体中随机删除一基因位或随机选取一基因位插入一新基因位,或在个体中随机选取一基因位用另一随机产生的基因位交换。
(5)对子代Bp进行免疫操作,得到新代Xp+1;接种疫苗和免疫选择是免疫算法的主要操作,接种疫苗是为了提高个体的适应度,免疫选择是为了防止个体的退化。接种疫苗即从Bp中按比例K随机抽取Nk=KN个个体Bip(i=1,2,…,Nk),并按先验知识修改Bip(这时就变为抗体),使其以较大的概率具有更高的适应度。接种疫苗时,若Bip已经是最佳个体,则其以概率1转移为Bip。对路径规划,接种疫苗就是对所选个体进行判断:首先,相邻两点间能否使AGV无障碍的沿直线运动;其次,任意两点间能否使AGV无障碍的沿直线运动?条件满足,则删除中间点。免疫选择分两步完成:免疫检测和退火选择。免疫检测即对抗体进行检测,若出现适应度下降,此时由父代个体代替其参加竞选,退火选择即以概率P(Bip)在当前子代中进行选择:
其中,为适应度函数;Tk是单调递减趋于0的退火温度控制序列,Tk=ln(T0/k+1),T0=100,p是进化代数[3]。
(6)选择个体进入新的群体。更新抗体库,并转到第(3)步。
4、仿真实验
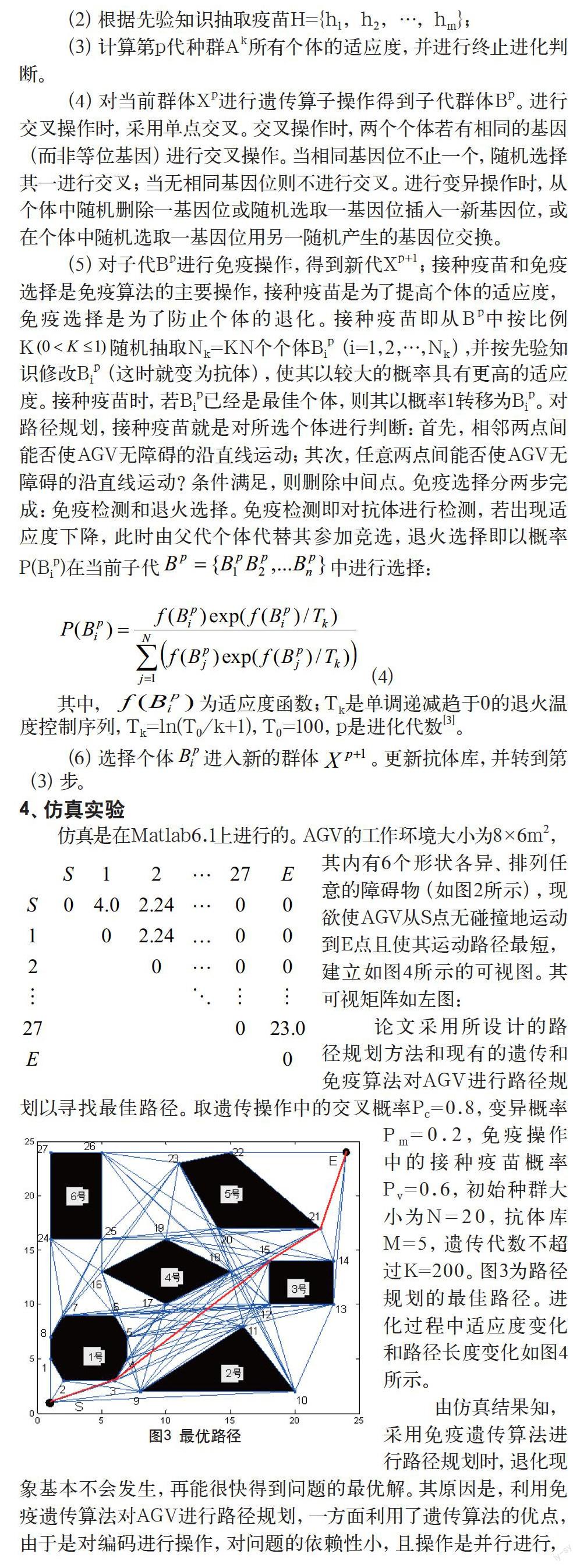
仿真是在Matlab6.1上进行的。AGV的工作环境大小为8×6m2,其内有6个形状各异、排列任意的障碍物(如图2所示),现欲使AGV从S点无碰撞地运动到E点且使其运动路径最短,建立如图4所示的可视图。其可视矩阵如左图:
论文采用所设计的路径规划方法和现有的遗传和免疫算法对AGV进行路径规划以寻找最佳路径。取遗传操作中的交叉概率Pc=0.8,变异概率Pm=0.2,免疫操作中的接种疫苗概率Pv=0.6,初始种群大小为N=20,抗体库M=5,遗传代数不超过K=200。图3为路径规划的最佳路径。进化过程中适应度变化和路径长度变化如图4所示。
由仿真结果知,采用免疫遗传算法进行路径规划时,退化现象基本不会发生,再能很快得到问题的最优解。其原因是,利用免疫遗传算法对AGV进行路径规划,一方面利用了遗传算法的优点,由于是对编码进行操作,对问题的依赖性小,且操作是并行进行,优化速度快;同时针对遗传算在进行交叉和变异操作时是以以概率方式随机地、缺泛指导性地进行导致问题进化时产生退化的现象,采用适当的指导,弥补了遗传算法的缺点。利用遗传免疫算法进行优化,在保证算法收斂的前提下,有效地提高计算速度。利用此法对AGV的路径进行规划,比其它的方法更有效。
5、结论
论文主要针对环境建模和路径搜索两大问题进行了研究。基于可视图环境建模方法优点,完成了对环境信息的建模。并结合遗传和免疫算法的优点设计了具有精英保留策略的基于免疫遗传算法的AGV路径规划方法。通过比较采用遗传算法、免疫算法和本论文所设计的免疫遗传算法对AGV进行路径规划结果和效率的比较,分析了所提出的基于免疫遗传算法的AGV路径规划方法的优点。仿真结果表明:
A.本论文采用改进的可视图法对环境信息进行建模,在改变障碍物位置、形状、大小和AGV的起点及终点的情况下,均可快速构建AGV的环境信息模型。
B.采用本论文所设计的基于免疫遗传算法的AGV路径规划方法对AGV进行路径规划,在速度方面优于传统的免疫算法和遗传算法,且系统退化现象基本得到消除。
参考文献
[1]吴锋,杨宜民.一种基于栅格模型的机器人路径规划算法[J].现代计算机(专业版),2012,4(3),7-9,13.
[2]沈凤梅,吴隆.基于改进人工势场法的移动机器人自主导航和避障研究[J].制造业自动化,2013,35 (12),28-30,39.
[3]李善寿,方潜生,肖本贤.全局路径规划中基于改进可视图法的环境建模[J].华东交通大学学报,2008,25(6),73-77.
作者简介
井治财(1968),男,诺伯特智能装备(汉中)有限公司,陕西省汉中市,邮编:723000。主要从事机床结构设计与误差检测。
史恩秀(1966),女,西安理工大学机械与精密仪器工程学院,副教授,陕西省西安市,邮编:710048。
