改进型模糊PID控制器在热工控制系统中的仿真应用
2016-06-12赵胜杰
赵胜杰
【摘要】针对火电厂锅炉燃烧系统控制结构复杂,变工况,大惯性及强耦合等特性,提出了一种基于改进型模糊PID控制器的锅炉燃烧系统控制方法。采用粒子群算法在线优化模糊控制器的调节因子,克服燃烧控制系统因变工况数学模型难以求取的控制难点。将常规PID控制器、模糊自适应PID控制器的仿真结果比较,表明改进型模糊PID控制器输出稳定,控制精度高,鲁棒性好。
【关键词】热工控制系统;改进型模糊自适应;粒子群算法
1、引言
大型火力发电单元机组的生产流程可以分为锅炉的燃烧系统和汽水系统。锅炉的燃烧系统是提供热量维持主汽负荷、保证燃烧经济性、安全性的重要控制系统。主汽压力是衡量蒸汽量与外界负荷两者是否相适应的重要标志。由于大型单元机组容量大,燃料品种多变,投入的磨煤机给煤机台数不同,导致常规的PID控制器难以满足实时控制的要求。
模糊控制器是一种控制结构简单的非线性控制器,具有很好的鲁棒性、适应性和容错性,一些学者已经将其应用于火电厂热工控制系统,但由于模糊控制本质上一种非线性的PD控制,无法消除系统静差。
2、改进型模糊控制器基本原理
改进型模糊控制策略的核心思想是,在保持模糊论域上模糊分割不变的情况下,根据输入量误差e和误差改变量ec的值对模糊论域和隶属函数进行伸缩调整。设输入变量xi和输出变量ui的论模糊域分别为(-Ei,Ei)和(-Ui,Ui),(i=1,2,...n),变论域模糊控制器的论域及隶属度函数随输入量变化而发生变化,其简略表达形式为:
3、改进型模糊自適应PID控制原理
3.1模糊自适应PID控制原理
模糊自适应PID控制器一种模糊控制与PID控制的复合控制器,该控制器改变传统PID控制器的参数Kp,Ki,Kd固定,无法跟随误差实时调整的缺点,提出了利用模糊控制器跟踪误差信号在线改变PID控制器参数的方法,提高了模糊控制的效果。
3.2粒子群算法寻优原理
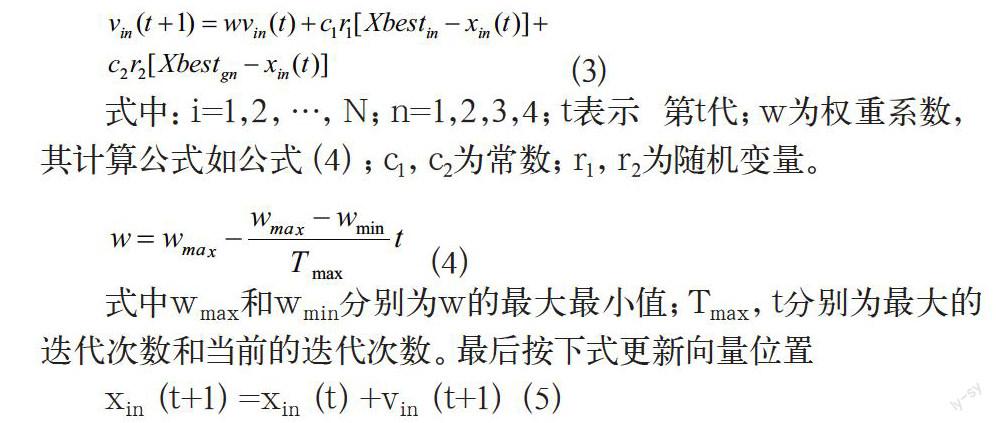
粒子群优化算法(PSO)是一种仿生优化算法,本文采用PSO对伸缩因子进行搜索优化,进而提高改进型PID控制器的控制效果,具体的优化过程如下:待优化的参数有αe,αec,βp,βi他们构成了搜索空间的四个维度,随机产生一组Xi,作为第一代初始种群,将Xi带入目标函数Q,计算适应值。设粒子i在当前寻优中的最优位置记为Xbesti=(xib1,xib2,xib3,xib4),相应的适应值记为Qbesti,则粒子i的当前最好位置可以表示:
重复上述步骤,直至得到最优解。
3.3改进型模糊PID控制器
模糊自适应PID控制器虽然可以修正原有PID控制器的控制参数,但是控制精度有限。本文采用标准粒子群算法在线优化模糊自适应PID控制器的调节因子,结合了两种控制器的优点,可根据系统误差大小实时调整模糊控制器的论域和系统输出,提高系统控制精度。
4、仿真实验
在某电厂300MW机组燃烧系统过程画面做实验,在装入不同初始条件时采样,采样周期为5秒,采样总时间为20分钟。将得到的数据处理后,利用辨识算法在Matlab中得到不同负荷下该燃料控制系统的数学模型。
4.1改进型模糊PID控制器的实现
本文选择采用采用改进的PSO算法对上述模糊自适应PID控制器的输入与输出环节的调节因子寻优,设置模糊控制器的模糊词集为{PB,PM,PS,Z,NS,NM,NB},采用三角形隶属函数,输入变量e,ec的基本论域分别设为[-12,12],[-6,6],输出变量的基本论域要根据PID控制器的参数设定。通过PID控制器参数整定方法,得到PID控制器的参数为δ=0.48,Ti=289,Td=0.0001。
因此模糊控制器的输出 的基本论域应该在比例、积分系数的一定范围内选择,为了计算方便设为[-0.6,0.6],[-0.012,0.012],而输入输出对应的模糊变量的模糊论域均为[-6,6],采用最大隶属度法去模糊化。根据公式(10)可以得到输入变量的量化因子ke,kec分别为0.5,1;输出变量的比例因子kp,ki分别为0.1,0.001。
4.2仿真结果
选取该电厂机组负荷为90%时,机组给煤量与主汽压之间的数学模型如下:
为了验证控制效果,与常规PID控制器,模糊自适应PID控制器进行仿真对比定值跃扰动下,有三种控制方式的系统输出。对比三条曲线可以看出,改进型模糊PID控制器在动态性能和稳态性能上都较明显优于另外两种控制器,它的控制精度更高,曲线更平稳。
4.3鲁棒性验证
在燃料控制系统中,分别选取机组负荷在80%、100%时的模型参数,保持模糊自适应PID控制器和改进型控制器的PID初值、控制规则、粒子群算法初值等不变的情况下,加入幅值为1的定值扰动,观察两种控制器的鲁棒性。改进后的控制器的鲁棒性明显优于模糊自适应PID控制器的鲁棒特性。
5、结束语
本文结合变论域控制思想,融入粒子群算法,设计出了改进型模糊PID控制器。采用标准粒子群算法在线优化模糊控制器的调节因子,改变控制器输出的大小,从而减弱控制系统对模糊控制规则和控制系统模型的依赖,优化了控制效果。
参考文献
[1]王俊伟,汪定伟.一种带有梯度加速度粒子群算法[J].控制与决策,2004,(11).
[2]朱岩,郭军平.变论域自适应模糊PID方法的研究与仿真主[J].空军工程大学学报,2005, (5).
