国产高精度宽覆盖多波束系统关键技术研发及应用
2016-06-11金永新刘佳罗宇
金永新 刘佳 罗宇


摘要:响应我国大力发展蓝色经济空间的政策,突破数字波束形成、高精度底检测、自适应底跟踪技术、深度修正等关键技术,研制国产浅海多波束测深仪,并集成多GNSS接收机、姿态仪、涌浪仪等辅助传感器,形成了完整的浅海多波束测深仪解决方案,促进了国产高端海洋探测装备的发展。
关键词:国产 多波束 测深 高精度 底检测 波束形成 深度修正
中图分类号:P229 文献标识码:A 文章编号:1672-3791(2016)04(a)-0018-04
21世紀以来,国际社会上向海洋进军成为世界主要沿海国家重大的战略选择。党中央、国务院对加快海洋经济发展高度重视,提出建设海洋强国的宏伟目标,实施海洋开发成为国民经济发展的重要任务。《中华人民共和国国民经济和社会发展第十三个五年规划纲要》明确提出拓展蓝色经济空间,坚持陆海统筹,发展海洋经济,科学开发海洋资源,保护海洋生态环境,维护海洋权益,建设海洋强国。《国务院关于加快培育和发展战略性新兴产业的决定》明确提出“高端装备制造业要大力发展海洋工程设备”。
海底地形测量是一切海洋工程活动的基础,它最基本的任务,就是测量海水的深度,测绘海底地形图(水深图)。特别是《联合国海洋法公约》颁布以来,海洋测绘和调查的意义己不再局限于航行安全与科学研究,它更迫切、更直接地关系到海底资源的归属和国家的主权和尊严。因此,各海洋大国都竭尽全力开展以大陆架为主的各种“海洋测绘工程”,海底地形地貌的测量更加频繁。在这种背景下,具有高效率、高精度、高分辨率的海底地形测绘设备-多波束测深系统应运而生,并已在人类认识和开发海洋的进程中发挥越来越重要的作用。因此,迫切需要开发我国自己的多波束测深系统”掌握自主知识产权高端海洋探测技术,并进行大规模的商用,具有国家安全战略层面的意义。
1.多波束系统研发国内外现状
多波束测深系统是一种多传感器的复杂组合系统,高度集成了现代信号处理技术、高性能计算机技术、高分辨显示技术、高精度导航定位技术、数字化传感器技术等相关高新技术。自70年代问世以来就一直以系统庞大、结构复杂和技术含量高著称。当前,国际多波束测量系统的发展趋势集中表现为:体积重量小型化、数据高密度和高精度化、数据处理通用化。
到目前为止,世界上仅有美国、丹麦、德国、挪威等少数发达国家能够生产取得规模化应用。由于种种原因,我国自行研制的多波束系统并没有真正大规模商用,使得我国现阶段使用的多波束系统主要依靠从国外购买,不但购买时价格昂贵,而且使用过程中维修、定期标定、甚至安装等都需返回原厂或者国外的技术支持,费用高、周期长。商用化的多波束核心技术受制于人,极大限制了我国海洋产业的发展。
2.多波束系统构成与关键技术
该项目以研发小型化、高测量效率、高测量精度、高分辨率的海底地形测量系统为目标,具体设计如下。
2.1总体架构设计
多波束测深系统由显控计算机、接口盒、声纳湿端以及软件系统组成(见图1)。
声纳湿端完成声信号的发射、接收、采集和预处理,预处理后的数据通过网络从声纳湿端传送给显控计算机。在显控计算机对数据进行信号处理,并结合传感器系统提供的数据,获得海底深度信息。软件系统完成显示控制和数据处理。其中声纳湿端包含发射模块和接收模块,其中发射模块由发射换能器和发射电子舱组成,发射电子系统安放在电子舱中;接收模块由接收换能器和接收电子舱组成,接收电子系统安放在电子舱中。同时,多波束可以集成了北斗定位定向仪、姿态传感器、罗经、表面声速仪、声速剖面仪、地面三维激光扫描仪等多种传感器,一体化测量快速获得水上水下目标数据(见图2)。
软件模块主要包含显控软件和信号处理软件,主要实现信号处理、实时控制、实时显示和数据管理功能。用于控制声纳湿端的工作参数和工作状态,实时接收、处理声纳原始数据,存储声纳原始数据到本地硬盘,实时解算测深深度,显示测量水域的海底声图;软件系统也能对本地硬盘声纳原始数据文件进行回放,以备查询详细的历史数据(见图3)。
2.2关键技术
2.2.1高精度底检测技术
多波束系统的信号处理过程可以简述为:首先将接收数据利用波束形成得到预成波束数据,利用底检测技术估计波达时间与方向,再利用辅助传感器获得的姿态数据进行运动补偿,同时利用声速剖面信息进行声速修正,最终得到海底深度信息,底检测模块是测深算法的核心(见图4)。
系统采用幅度检测方法和相位检测方法联合测定回波的到达时刻(TOA)和方位(DOA),以保证大开角工作情况下,边缘波束的检测能力。其中幅度检测方法由加权能量中心时间法(WMT--Weight Mean Time)和角度方位估计法(BDI-Bearing Direction Indicator)组成。在回波方向在25°以内采用WMT幅度检测,大于25°采用相位检测(见图5)。
WMT处理方法是根据波束输出定义一系列波束角度,首先在制定波束时间片上将幅度进行内插,然后通过对幅度进行加权来估计这些角度回波的TOA。
(1)幅度内插。
假设一制定的波束角为θ n,经过横摇修正后得到其相邻的两个方向角θ n-1和θ n+1,对θ n-1和θ n+1两个方向的回波信号幅度进行抛物线内插,即可得到θ n方向的回波信号幅度值,如图6。
(2)幅度加权估计TOA。
将时间片上对应方向的各时间点的幅度进行内插,然后按照时间先后顺序排列,根据起始门、终止门来剔除媚外的数据,然后利用公式(1)对门内的数据进行加权平均求得TOA(见图7)。
BDI与WMT的区别在于其估计每一波束真实回波方位,特别适用于非镜像区域的信号处理。处理流程如图8。
利用BDI处理技术能在边缘波束上得到较为稳定的时间方位估计,但在中间区域的估计结果误差较大。所以寻求WMT与BDI联合估计的底检测方法,能够适应波束大开角的系统设计要求。下图对比了同一组数据系统底检测处理结果与国外设备处理结果的对比图,可以看出自研设备与国外设备处理结果非常一致(见图9)。
2.2.2自适应底跟踪技术
自适应底跟踪技术是测深系统的关键,通过设定合理的跟踪窗,可以滤除来自水流、鱼群等的干扰回波信号,提高多波束测深系统测深结果的稳定性。波束形成、信号检测算法和滤波算法。
系统依据海底的坡度走势和深度以及当前跟踪效果,采用粒子滤波算法,设计合理的跟踪策略,实现自适应底跟踪。
图10是海底剧烈起伏状态下的自适应跟踪曲线,可以看出虽然海底起伏比较大,但是跟踪门仍然准确有效(见图10)。
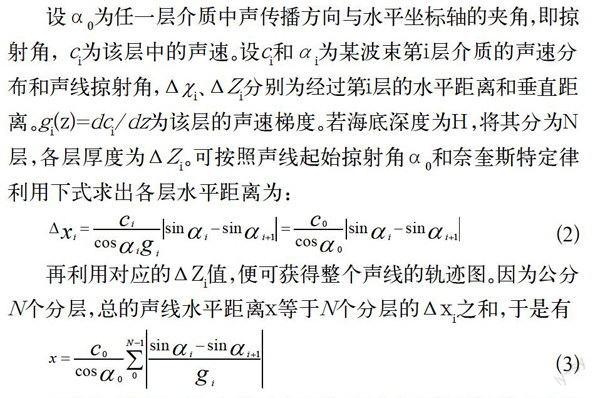
2.2.3深度修正技术
海水中的声速是受到温度、深度、盐度等因素水平分层变化的影响也近似为水平分层变化,存在声速方向的声速梯度,导致海水中的声线轨迹发生弯曲。如果采用近似的恒定声速,必然带来测深误差和对应海底的位置误差,达不到精确测量海底深度的目的(见图11)。
系统依据snell定律,采用声线跟踪技术实现海底深度修正(见图12)。
在将波达时间和方位转化为海底的深度信息时,尽管对中间波束来说,把声线径迹近似地视为直线是合适的,但对于边缘波束而言,声线弯曲是比较明显的。需要利用海区的声速剖面信息,利用全射线跟踪技术,由传播时间重新建立海底深度值。
由此得到海底对应点的真实深度,以及它和测量船的水平偏移距离。
图13中是下方的曲线是经过深度修正后的湖上试验结果。
2.3辅助传感器集成
为了达到良好的测深效果,浅水多波束测深仪系统还需要搭配声速剖面仪、表面声速仪、RTKGPs、姿态传感器等。该系统通过硬件时钟同步,辅助传感器与声学数据的同步精度可以达到1 ms,完全可以满足高精度水深测量的要求。
3.展望应用领域与市场
该文介绍了国产高精度浅海多波束测深仪系统,其波束扇形开角为160°,波束数256个,斜距分辨率为3.75 cm,是一种具有高测量效率、高测量精度、高分辨率的浅海海底地形测量设备。特别适合于大面积的扫海测量作业、海洋资源调查、海底地形可视化测量、水下打捞,可在海洋测绘、海洋工程建设、海洋资源开发、海洋科学研究、维护海洋权益等领域得到广泛而深远的应用,有利于支撑我国海洋战略。
