PWM脉宽调制驱动器应用于超声无损检测技术中的噪声研究
2016-06-08秦华容王俊涛罗玉文
秦华容 王俊涛 罗玉文

【摘 要】在超声无损检测系统中,PWM脉宽驱动器工作时会对超声检测信号产生强烈的电磁干扰,本文作者基于自主研发的两轴超声自动扫查装置,进行了大量实验,最终设计出一种LCL滤波器可以有效降低PWM脉宽驱动器噪声工作时对超声信号产生的电磁干扰,并在实际工作中得到应用,为超声无损检测系统中驱动器的选型提供了依据。
【关键词】超声检测设备;PWM脉宽驱动器;LCL滤波器
随着微电子学和计算机技术的发展及电气自动化水平的不断提高,自动超声无损检测系统应运而生。它将自动化设备和超声无损探伤设备完美结合在一起,实现了大面积的超声自动扫查,提高了检测数据的准确性和可靠性,得到的数字图像能够更加直观地对缺陷进行识别和判断[1]。
1 超声检测系统噪声来源
自动超声检测系统工作过程中,超声信号极易受到各种噪声的干扰,这些噪声主要为声学噪声(即材料的结构噪声)和非声学噪声。以下主要研究检测系统中由PWM脉宽调制驱动器产生的噪声和有效解决办法。
PWM脉宽调制驱动器以其高效、高智能化、小体积等优点,目前已经广泛应用于各种超声自动化检测设备中,其中PWM脉宽调制驱动器就是系统的一个很强的干扰源,脉宽调制型驱动器通过调节电能的脉冲宽度来实现电压或者电流的控制,而脉冲宽度的调节是通过晶体管的高速开通和关断来实现[2]。在晶体管开通和关断过程中,流经晶体管的电流产生了以开关频率为基频的高频噪声,其频率范围从20K至30M之间,这些电磁噪声严重干扰着超声检测系统,使得检测效率大大降低。
为了得到准确可靠的检测结果,必须对脉宽驱动器产生的高频噪声采取相应的抑制措施。首先可以通过硬件的方法来消除或抑制干扰,如屏蔽、接地、隔离等,但采用这些抑制措施后,采集到的超声信号中仍有一些高频噪声,需要通过设计滤波器的方法进行处理。
2 滤波器设计
2.1 滤波器介绍
针对脉宽调制型驱动器产生的电磁噪声,可选用无源滤波器来降低噪声。无源滤波器可分为3种:L型、LC型、LCL型,3种滤波器各有特点。L型滤波器简单易用,稳定性高,效果一般,对于一般的工业场合都满足要求,但只能对电流滤波,电压的噪声依然存在;LC型滤波器简单易用,稳定性好,效果明显,对电流和电压噪声都有一定的效果;LCL较为复杂,对于特定的电机和驱动器需要合理计算和设计,否则会影响控制系统的稳定性,但对电流和电压噪声有明显的抑制效果。在分析PWM脉宽驱动器工作时产生的电磁干扰时,主要从共模和差模噪声的角度来分析,并针对驱动器产生的共模和差模噪声,设计了LCL滤波器,实验证明该滤波器有效降低了PWM驱动器工作时产生的电磁噪声,同时对其他噪声也有一定的抑制作用。
2.2 滤波器参数设计[3]
3 实验过程和结果分析
3.1 两轴超声自动扫查平台介绍
本文作者基于自行开发的一套两轴超声自动扫查装置,分别采用特定型号的PWM脉宽调制驱动器和无刷电机进行试验,在采用硬件方法对大部分系统干扰进行有效抑制后,通过在驱动器输出和电机之间设计一种LCL滤波器的方法,有效抑制了检测信号中的高频电磁干扰产生的差模和共模噪声。
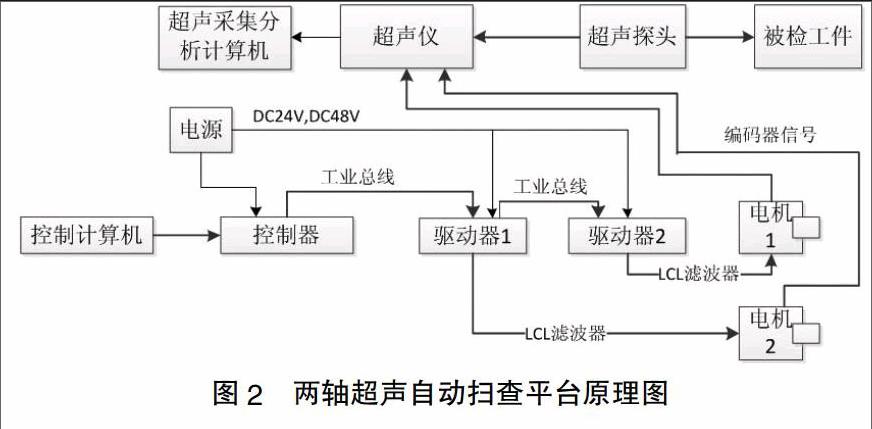
试验采用一个轴控制器(基于EtherCAT通讯协议),两个基于EtherCAT工业总线的PWM脉宽调制驱动器1,2,两个直流无刷电机1,2,功率分别为100W,DC24V和DC48V电源,搭建了一个通用的两轴自动扫查平台,其原理框图如图2所示。电源给控制器和驱动器提供电源,控制器作为整个平台的“管理者”,通过EtherCAT工业总线串行级联的方式管理两个脉宽驱动器工作。控制计算机中控制软件发指令给控制器,控制器接收到指令后发指令给驱动器,驱动器接收到后再驱动电机带动机械装置运动,从而携带超声探头进行扫查(机械装置作为超声探头的载体),超声仪接收到超声信号后,通过和采集分析计算机的实时通讯,来实现超声采集和信号分析,同时电机上的编码器信号一路反馈到驱动器,另一路反馈到超声仪,从而实现控制和超声检查位置的同步,最终实现超声自动探伤。
3.2 差模噪声抑制效果
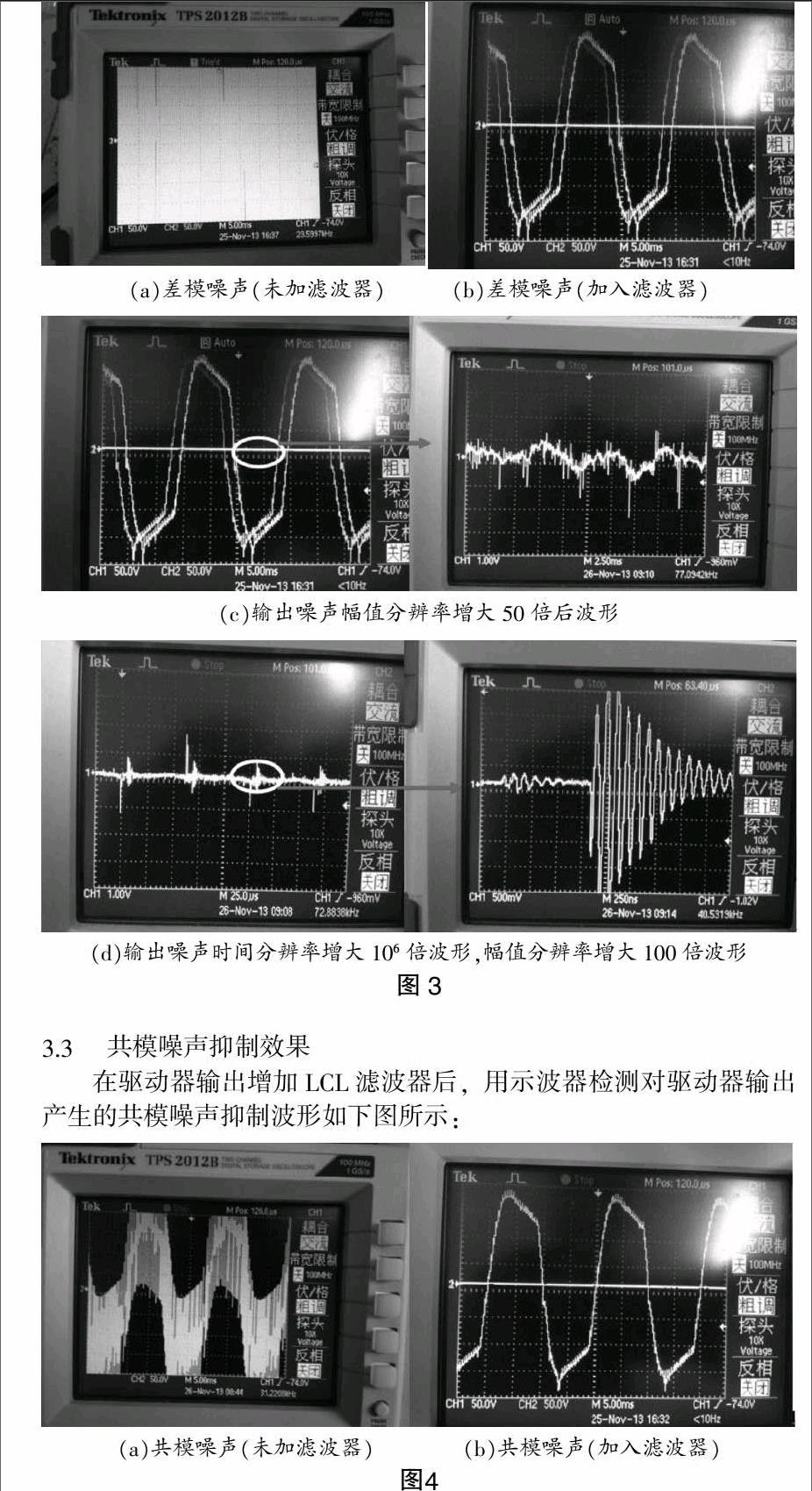
基于前面介绍的两轴通用超声自动扫查平台,在驱动器输出和电机之间增加了作者设计的LCL无源滤波器,用示波器检测驱动器输出产生的差模噪声抑制波形,如下图所示:
如图3中a,b,c所示,蓝色波形为驱动器输出的有用信号,而黄色波形为驱动器产生的叠加在有用信号上的噪声信号,驱动器输出噪声对比:
1)图3(a)(b)幅值分辨率50V/div,时间分辨率5ms/div,
2)图3(c)幅值分辨率1V/div,时间分辨率2.5ms/div,
3)图3(d)幅值分辨率0.5V/div,时间分辨率为250ns/div,
图(a)为未加滤波器驱动器输出噪声,图(b)为加入设计的LCL滤波器后驱动器的输出噪声,图(d)为图(b)在幅值和时间分辨率增大后的更清晰的波形。测量可知图(a)中未加滤波器输出波形的高频谐波幅值大于400V,图(d)中加入LCL滤波器后的高频谐波幅值为4V,频率为30MHz,噪声抑制比为20lg100=40dB。
3.3 共模噪声抑制效果
在驱动器输出增加LCL滤波器后,用示波器检测对驱动器输出产生的共模噪声抑制波形如下图所示:
幅值分辨率50V/div,时间分辨率5ms/div,从图中可以看出,除了电源220V载波,还叠加了一个频率为16KHZ(驱动器调制频率)幅值为400V的高频噪声,即为驱动器产生共模噪声,增加LCL滤波器滤波后,220V电源信号无影响,对高频噪声抑制明显,实验结果表明,共模噪声抑制比为32dB。
3.4 滤波器对超声检测系统中噪声抑制效果
基于前面介绍的两轴通用自动扫查装置,超声探头将信号送给超声仪,最终在图1中的超声采集分析计算机中对信号进行分析,目前,我们采用ZETEC公司的专用超声分析软件,在所有参数设置一致的前提下,如图6所示,蓝色波形为噪声信号,红色波形为噪声信号的包络,未加LCL滤波器时,图(a)中噪声信号最高幅值高达75%;增加LCL滤波器后,图(b)中噪声信号最高幅值降为40%。实验表明增加LCL滤波器后,对驱动器在超声信号上产生的高频干扰有明显的抑制效果。
4 总结
通过上述大量实验,结果表明PWM脉宽调制型驱动器工作时产生的噪声来源于脉冲波形过冲过程中振荡产生,与开关调制频率无关,噪声的大小取决于振荡波的幅值、屏蔽和接地的良好程度,以及隔离效果。通过屏蔽,接地及在驱动器输出和电机之间增加LCL滤波器可以很好的抑制噪声效果,为PWM脉宽驱动器在超声自动检测系统中应用提供了依据。
【参考文献】
[1]罗婕,等.自动超声检测系统中的电机干扰研究[J].无损检测,2006,29(3):135.
[2]秦继荣,等.现代直流伺服控制技术及其系统设计[M].北京:机械工业出版社,1993.
[3]敖荣庆,等.伺服系统[M].北京:航空工业出版社,2006.
[责任编辑:王伟平]
