山地果园拆装牵引式双轨运输机控制系统的设计
2016-06-06欧阳玉平洪添胜黄志平蔡志成马煜东
欧阳玉平,洪添胜,黄志平,苏 建,蔡志成,马煜东
(1 华南农业大学 a 南方农业机械与装备关键技术教育部重点实验室,b 工程学院,广东 广州510642;2 国家柑橘产业技术体系机械研究室,广东 广州510642;3 梅州振声现代农业装备有限公司,广东 梅州514794)
山地果园拆装牵引式双轨运输机控制系统的设计
欧阳玉平1,2,3,洪添胜1,2,黄志平3,苏建1,2,蔡志成1b,马煜东1b
(1 华南农业大学 a 南方农业机械与装备关键技术教育部重点实验室,b 工程学院,广东 广州510642;2 国家柑橘产业技术体系机械研究室,广东 广州510642;3 梅州振声现代农业装备有限公司,广东 梅州514794)
[摘要]【目的】 设计适用于山地果园牵引式双轨运输机的控制系统,为山地果园牵引式运输机械的设计提供支持。【方法】 在分析该类拆装牵引式双轨运输机整机结构及应用工况的基础上,针对山地果园拆装牵引式双轨运输机拆装频繁、应用环境恶劣等工况,运用控制系统硬件、软件设计理论与性能试验相结合的方法,设计一种以PLC为控制核心、液晶触摸屏为人机交互窗口的控制系统,重点分析控制系统的工作原理、硬件设计、软件设计、无线遥控设计和抗干扰措施,并对控制系统的核心部件及稳定性进行理论和试验研究。【结果】 所设计的山地果园拆装牵引式双轨运输机控制系统运行可靠,定位系统的平均距离偏差为5.18 cm,平均定位距离误差率为0.96%,平均脉冲误差率为0.68%;在有遮挡的情况下,无线遥控器在距离遥控接收装置300 m范围内的通信成功率为100%。【结论】 所设计的控制系统可满足运输机的智能化控制需求,该控制系统亦适用于其他钢丝绳提升式运输机的作业控制。
[关键词]山地果园;牵引式运输机;控制系统;PLC
为加速我国山地果园的机械化作业进程,近年来山地果园省力化运输机械得到了迅猛发展[1-11]。山地果园拆装牵引式双轨运输机是其中一种代表机型,该运输机以卷扬机作为驱动力,轨道沿果园耕作道铺设,载物滑车骑跨于轨道之上,在卷扬机的牵引下沿轨道上下运行,实现物资的省力化运送[12-13]。
但是,目前运行中还存在一些不足,例如该类轨道运输机需频繁拆装转移,给控制系统的智能化、简约化和安全性提出了更高的要求;载物滑车运行至轨道极限位置或人眼无法看见处,如何实现及时精确停车等[12-13]。另外,现有山地果园运输机以自走式为主,即以汽油机或柴油机为驱动力,运载能力强,轨道可远距离转弯铺设,但是需有人驾驶,且存在噪音大、笨重、危险和污染环境等缺陷[4-9,14]。张俊峰等[15]研制的山地橘园无轨运输机以钢丝绳为牵引媒介,控制系统由传统继电器构成,在轨道首尾设置行程开关,以实现轨道首尾极限位置自动停车,但行程开关等继电器的导线沿轨道布置,因而线路布置相当繁琐,这种情况下不但导线在户外易老化或被老鼠等咬坏,而且不适合拆装牵引式运输机。为此,本研究试图设计一种以PLC作为控制核心,以液晶触摸屏为人机交互窗口,集编程、变频调速、运载参数监控等技术为一体的自动控制系统,以实现无需在轨道上布置行程开关而使载物滑车在轨道上可以任意定位自动停车,且运输机的运行参数可实时动态监控,进而为山地果园运输机的设计提供支持。
1运输机整机结构
山地果园拆装牵引式双轨运输机主要由驱动装置、轨道、载物滑车、钢丝绳和断绳制动装置等组成,其整机结构如图1所示。
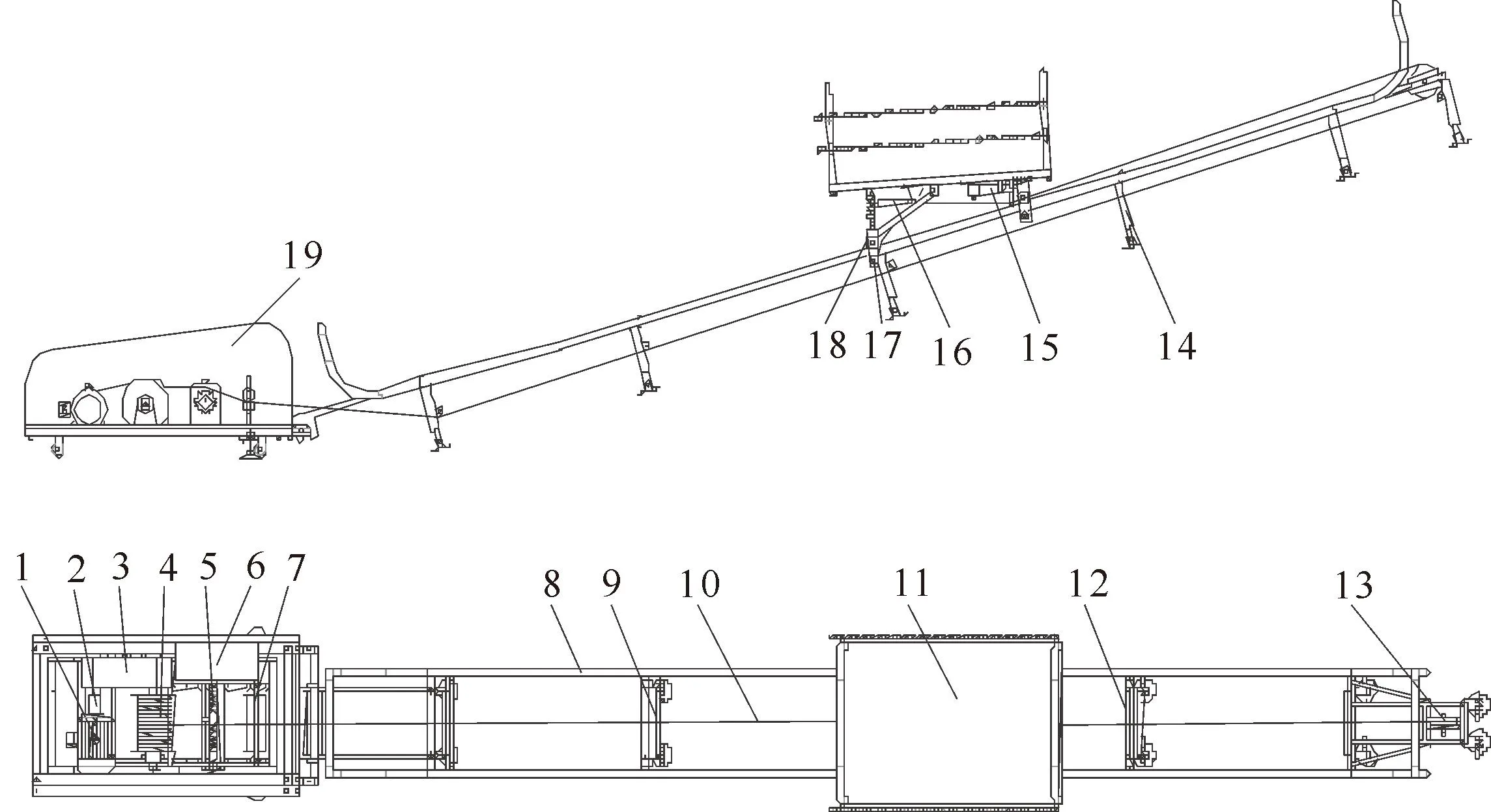
图 1山地果园拆装牵引式双轨运输机结构示意图
1.电动机;2.电磁制动器;3.减速箱;4.卷筒;5.钢丝绳排序装置;6.控制箱;7.钢丝绳张紧装置;8.轨道;9.托辊;10.钢丝绳;
11.载物滑车;12.轨道横梁;13.滑轮;14.支撑柱;15.导向杆;16.制动杆;17.防翻轮;18.承重轮;19.罩盖
Fig.1Structure of mountain orchard detachable traction double-track transport
1.Electromotor;2.Electromagnetic brake;3.Reduction gearbox;4.Rotary drum;5.Wire rope arranging device;6.Control box;
7.Wire rope tension device;8.Track;9.Roller;10.Wire rope;11.Loading block;12.Track cross beam;13.Pulley;
14.Support pin;15.Guide rod;16.Brake rod;17.Defend turning wheel;18.Burden wheel;19.Shell
驱动装置内包含电动机、电磁制动器、减速箱、卷筒和钢丝绳等;载物滑车由车架、行走轮、防翻轮和钢丝绳导向杆等组成;轨道由2根外径为48 mm的钢管和若干横梁、支撑柱焊接而成,以3 m为一节,节与节之间通过螺栓相连。载物滑车骑跨于轨道之上,且在驱动装置的牵引下沿轨道运行,从而实现省力化运载。
2控制系统工作原理
控制系统设计目标为:以PLC为控制核心,以按钮开关和无线遥控装置作为输入控制,辅以液晶触摸屏人机交互窗口,对运输机的全程运载作业进行智能控制。载物滑车在轨道首尾的自动定位停车可通过电气控制箱表面的旋钮进行人为设定。
控制系统原理如图2所示,PLC控制电路接线如图3所示。

图 2 山地果园运输机控制系统原理图

图 3 山地果园运输机控制系统PLC控制电路接线图
控制系统主要设计成6个部分:主控模块、输入控制模块、信号输入模块、输出控制模块、警示模块以及显示模块。主控模块以PLC作为主控制器,完成接收控制命令及输出控制命令等任务;输入控制模块包括手动控制装置、遥控装置以及限位设置装置3部分,实现控制命令输入;信号输入模块包括旋转编码器,防松、超载传感器等元件,实现卷筒转动角位移、钢丝绳松脱及载物滑车超载信号输入等;警示模块包括警报灯及爆闪灯,当运输机出现载物滑车超载及松脱、过压或欠压以及电流超出额度电流一定范围等异常情况时,警报灯立即工作,提示操作者系统出现异常,并及时采取措施;输出控制模块包括变频器、强电控制器、制动装置及三相异步电动机4部分,在系统中实现三相异步电动机正、反转,停止以及调速等情况时的示警功能;显示模块以触摸显示屏为主,实现控制变频器频率输出,显示输出主频率、当前输出频率和当前运行参数等功能。
3硬件系统设计
控制系统PLC选用台达DVP-ES2型,共有24点,其中输入16个点,输出8个点;触摸屏选用台达系列的DOP-B07S411触摸显示屏,触摸屏与PLC通讯采用RS232协议;三相变频器选用台达VFD-M型,功率为2.2 kW,与PLC通讯采用RS485协议;脉冲读取装置选用台达脉冲式旋转编码器,该编码器输出两相信号,即A、B相,正转时,输出脉冲B相超前A相45°~135°,反转时,输出脉冲A相超前B相45°~135°[16-20]。编码器采集载物滑车首、末端停止位置对应的三相异步电动机角位移信号,以数字信号传至PLC,然后由操作者进行人为设定。PLC根据首、末端位置对应的数字信号,比较运输机在运行时编码器实时的角位移信号,使运输机始终在设定的轨道范围内运行,达到自动定位停车的目的。硬件控制流程如图4所示。

图 4 山地果园运输机PLC控制系统硬件控制流程图
4软件系统设计
4.1人机交互界面
山地果园牵引式双轨运输机人机交互界面采用DOPSoft1.01.08软件进行编写,并存放于触摸屏内存中,如图5所示,主要用于实现运输机运行参数设置(频率、上下限位置)、工作状态(运行时间、距离、速度、钢丝绳张紧力、轨道坡度)等的输入、读取和显示。该系统界面由主菜单和参数设置界面组成,由切换页面按钮进行页面的切换。主控界面主要控制双轨运输机的上行、下行、停止和运行参数的显示,参数设置界面用于设定运行频率以及上下限位置。触摸屏将触摸动作信号通过RS-485总线传送至PLC,亦可从PLC中读取相应的状态信息和相应参数,实现人机交互。
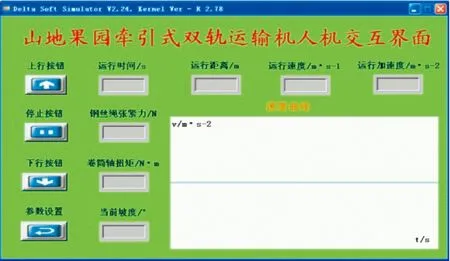
图 5 山地果园运输机的人机交互界面
4.2无线遥控设计
遥控接收装置的控制电路如图6-A所示,由PT2272(普城公司,台湾)无线接收模块、继电器及二极管、三极管等元件组成。当PT2272模块接收到控制信号,给三极管8050一高电平,三极管导通,继电器线圈吸合,控制端口导通,以开关量信号给PLC发送控制命令。遥控发射装置电路如图6-B所示,由PT2262 (普城公司,台湾)无线发射模块以及按键组成,当上、下、停对应的按键被触发时,PT2262无线发射模块根据对应的触发信号给PT2272模块发射控制指令。实际应用时,PT2262/PT2272的载波频率为315 MHz,工作电压为5 V,调制方式为ASK,通过焊接地址编码引脚使2个模块具有相同的地址码。
4.3控制程序设计
该控制系统软件程序在WPLSoft 2.30下编写,控制系统的主流程如图7所示。系统启动、初始化之后,PLC首先判断是否成功接收到控制信号,如果有则变频器及电动机根据控制信号进入启用模式。在运输机运行过程中,PLC对编码器的实时信号与预先设定好的上限位置或下限位置信号进行比较,当两者的脉冲信号相等时,变频器及电动机停止运行,不相等则继续运行。

图 6山地果园运输机遥控发射及接收装置电路图
A.遥控接收装置;B.遥控发射装置
Fig.6Structure of remote control receiving and launching device control circuit of orchard transport
A.Remote control receiving;B.Remote control launching

图 7 山地果园运输机PLC控制系统主程序流程图
5抗干扰措施
山地果园电压不稳定及空气潮湿等因素,会对运输机控制系统的长期稳定运行造成严重干扰。若不采取恰当措施,易造成PLC系统程序失控和变频器等外围设备发生故障,影响运输机正常的运载作业。为此,在硬、软件上都应采取抗干扰措施,主要设置为:
1)PLC采用独立的开关电源,且其PE点良好接地,既能抑制电磁干扰,又能抑制向外发出干扰[19]。
2)变频器采用屏蔽电缆与电机连接,且电缆屏蔽层接地[20]。
3) 传感器的信号读取后,控制系统仅处理延时数秒且持续存在的信号,以剔除偶尔的干扰可能造成的数据误读,故而在软件中设置了过热延时、过载延时、过松延时等参数项。
4)信号线缆远离大功率电机等感性负载。信号线缆和电源线缆分开走线,间距15 cm以上,避免近距离平行敷设。
6运输机控制系统性能试验
为进一步研究山地果园拆装牵引式双轨运输机控制系统的控制性能和定位停车精度,于2014年5月在华南农业大学工程学院国家柑橘体系机械研究室试验园进行了该运输机控制系统性能试验,运输机的驱动装置位于下方,配套电机动力2.2 kW,轨道长度14.5 m,轨道坡度11.5°,试验牵引绳为新钢丝绳,直径8 mm。试验现场如图8所示。

图 8 山地果园运输机控制系统性能试验现场的布置
测试系统的组成为:瑞士Leica Disto A5 激光测距仪,测量精度±2 mm,用于测试载物滑车自动停车位置与预先设定位置的偏差。
脉冲误差率和定位距离误差率的计算公式如下:

旋转编码器定位试验与分析结果见表1。

表 1 旋转编码器定位试验结果
由表1可知,使用旋转编码器定位系统的平均定位距离误差为5.18 cm,平均定位距离误差率为0.96%,平均脉冲误差率为0.68%。随着装载质量的增加,定位距离误差也随之增加,但脉冲数变化不大,分析其原因为装载质量增加,钢丝绳的形变量更大,随着轨道试验长度的增加,定位距离误差也随之增加;但脉冲数变化不大,分析其原因为试验长度越长,钢丝绳累积误差越大。随着频率的增加,定位距离误差和脉冲数误差都有所增大,但脉冲数变化相对较小,分析其原因为速度越快,惯性越大,导致定位误差越大。
无线遥控器通信成功率试验在有房屋、树木等遮挡的条件下进行,试验结果表明该无线遥控器在距离遥控接收装置300 m范围内的无线通信成功率为100%。
7结论
1)本研究的山地果园拆装牵引式双轨运输机控制系统以PLC为控制核心,辅以液晶触摸屏为人机窗口,对运输机的全程运载作业进行自动控制,有效实现了运输机速度调节、无线遥控控制、定位停车和运行参数监控等功能。采用编码器定位系统实现了载物滑车定位停车。试验研究表明,定位系统的平均误差距离为5.18 cm,平均定位距离误差率为0.96%,平均脉冲误差率为0.68%,可满足载物滑车安全自动停车的要求。
2)采用PT2262/PT2272无线通信模块作为运输机遥控发射/接收装置,试验结果表明,以遥控接收装置为测试中心,遥控器在有遮挡的条件下,在距离遥控接收装置300 m范围内的无线通信成功率为100%,能满足运输机遥控器无线通信需求。
[参考文献]
[1]洪添胜,杨洲,宋淑然,等.柑橘生产机械化研究 [J].农业机械学报,2010,41(12):105-110.
Hong T S,Yang Z,Song S R,et al.Mechanization of citrus production [J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):105-110.(in Chinese)
[2]杨洲,李雪平,李君,等.果园钢索牵引悬挂式货运系统关键部件设计 [J].农业工程学报,2014,30(7):18-24.
Yang Z,Li X P,Li J,et al.Design on key parts of cable-driven hanging transportation system for orchard [J].Transactions of the Chinese Society of Agricultural Engineering,2014,30(7):18-24.(in Chinese)
[3]洪添胜,苏建,朱余清,等.山地橘园链式循环货运索道设计 [J].农业机械学报,2011,42(6):108-111.
Hong T S,Su J,Zhu Y Q,et al.Circular chain ropeway for cargo transportation in mountain citrus orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(6):108-111.(in Chinese)
[4]李善军,邢军军,张衍林,等.7YGS-45型自走式双轨道山地果园运输机 [J].农业机械学报,2011,42(8):85-88.
Li S J,Xing J J,Zhang Y L,et al.7YGS-45 type self-propelled dual-track mountain orchard transport [J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):85-88.(in Chinese)
[5]朱余清,洪添胜,吴伟斌,等.山地果园自走式履带运输车抗侧翻设计与方针 [J].农业机械学报,2012,43(S):19-23.
Zhu Y Q,Hong T S,Wu W B,et al.Design and simulation of side rollover resistant capability of tracked vehicle for mountain orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(S):19-23.(in Chinese)
[6]Li S J,Xing J J,Zhang Y L,et al.Construction of 7YGS-45 type orchard transport automatic control test platform [C]//Advanced Materials Research,2011,201:1396-1401.
[7]Xing J J,Li S J,Zhang Y L.Main parameters calculation and performance test of 7YGS-45 type self-propelled dual-track orchard transport [J].Advanced Materials Research,2012,499:232-237.
[8]张俊峰,李敬亚,张衍林,等.山地果园遥控单轨运输机设计 [J].农业机械学报,2012,43(2):90-95.
Zhang J F,Li J Y,Zhang Y L,et al.Design of remote control monorail transporter for mountainous orchard [J].Transactions of the Chinese Society for Agricultural Machinery,2012,43(2):90-95.(in Chinese)
[9]陈银清,洪添胜,孙同彪,等.山地果园单轨运输机的最小转弯半径及最大承载量分析 [J].农业工程学报,2012,28(S):50-56.
Chen Y Q,Hong T S,Sun T B,et al.Analysis on minimum turning radius and maximum carrying capacity of monorail vehicles for mountain orchard [J].Transactions of the Chinese Society of Agricultural Engineering,2012,28(S):50-56.(in Chinese)
[10]李震,卢加纳,洪添胜,等.山地果园钢丝绳牵引运输机超声波壁障系统 [J].农业机械学报,2011,42(10):116-120.
Li Z,Lu J N,Hong T S,et al.Obstacle avoiding system of mountain orchard steel wire rope traction cargo vehicle based on ultra-sonic sensing [J].Transactions of the Chinese Society for Agricultural,2011,42(10):116-120.(in Chinese)
[11]洪添胜,张衍林,杨洲,等.果园机械与设施 [M].北京:中国农业出版社,2012:103-119.
Hong T S,Zhang Y L,Yang Z,et al.Orchard machinery and facilities [M].Beijing:China Agriculture Press,2012:103-119.(in Chinese)
[12]洪添胜.一种钢丝绳牵引式山地果园货运机:中国专利,CN202294798U [P].2012-06-20.
Hong T S.A kind of steel wire rope traction type of mountainous orchard freight machine:China Patent,CN202294798U [P].2012-06-20.(in Chinese)
[13]洪添胜.一种可移动式山地果园货运系统:中国专利,CN102806918A [P].2012-12-05.
Hong T S.A kind of movable mountainous orchard freight system:China Patent,CN102806918A [P].2012-12-05.(in Chinese)
[14]Kunihisa M,Osamu S,Osamu K,et al.New technologies and systems for high quality citrus fruit production,labor-saving and orchard construction in mountain areas of Japan [J].Journal of Mountain Science,2005,2(1):59-67.
[15]张俊峰,张唐娟,张衍林.山地橘园遥控牵引式无轨运输机的设计 [J].湖北农业科学,2012,51(10):2111-2113.
Zhang J F,Zhang T J,Zhang Y L.Design of remote control transporter for mountains orangery [J].Hubei Agricultural Science,2012,51(10):2111-2113.(in Chinese)
[16]王磊杰,张红梅.增量式光电旋转编码器及在角减速测量中的应用 [J].机电产品开发与创新,2005,18(5):114-118.
Wang L J,Zhang H M.Incremental photoelectric rotary encoder and application in the measuring of angular deceleration [J].Development and Innovation of Machinery and Electrical Products,2005,18(5):114-118.(in Chinese)
[17]常春,胡瑜,董彬.光电旋转编码器的研究与应用 [J].仪表技术与传感器,2001(12):34-35.
Chang C,Hu Y,Dong B.Investigation and application of photoelectric revolving encoder [J].Instrument Technique and Sensor,2001(12):34-35.(in Chinese)
[18]黄素群,徐宏利,刘从军.光电旋转编码器在自动化生产线的应用 [J].现代显示,2006(69):63-66.
Huang S Q,Xu H L,Liu C J.Application of elctro-optic rotary encoder in automatic production line [J].Advanced Display,2006(69):63-66.(in Chinese)
[19]毕立海,王静,金红兵.解决PLC控制系统应用中干扰问题的方法 [J].机械制造与自动化,2007,36(2):126-128.
Bi L H,Wang J,Jin H B.Method of the problem with signal to noise in PLC control system [J].Manufacture of Machinery and Automation,2007,36(2):126-128.(in Chinese)
[20]张存礼.PLC控制系统的干扰源分析及抑制干扰对策 [J].电力自动化设备,2006,26(8):8-11.
Zhang C L.Interference source analysis of PLC control system and its countermeasures [J].Electric Power Automation Equipment,2006,26(8):8-11.(in Chinese)
Design of detachable traction double-track transport control system for mountain orchards
OUYANG Yu-ping1,2,3,HONG Tian-sheng1,2,HUANG Zhi-ping3,SU Jian1,2,CAI Zhi-cheng1b,MA Yu-dong1b
(1 aKeyLaboratoryofKeyTechnologyonAgriculturalMachineandEquipment,MinistryofEducation,bCollegeofEngineering,SouthChinaAgriculturalUniversity,Guangzhou,Guangdong510642,China;2DivisionofCitrusMachinery,ChinaAgricultureResearchSystem,Guangzhou,Guangdong510642,China;3MeizhouZhenshengModernAgricultureEquipmentCoLtd,Meizhou,Guangdong514794,China)
Abstract:【Objective】 A traction double track transport for mountain orchards was designed to provide support for design of transport machinery in mountain orchards.【Method】 Mountainous orchard detachable traction double-track transport was used in harsh environment conditions and disassembly and assembly were conducted frequently.Based on analysis of the whole structure and application conditions of detachable traction double track transport in mountain orchards,this paper designed a control system that used PLC as control core and LCD touch screen as man-machine interactive window by combining the design principal of control system hardware,software design and performance test experiments.It focused on the analysis of working principle,control system hardware design,software design,wireless remote control design,and anti-interference measures.The paper also made theoretical and experimental research on the control system of core components and its stability.【Result】 The designed detachable traction double-track transport control system for mountain orchards was reliable.The average distance of rotary encoder positioning system was 5.18 cm,the average positioning distance error rate was 0.96%,and the average pulse error rate was 0.68%.The wireless communication reliability of the wireless remote control was 100% when the remote control was within 300 m to the remote control receiver with obstacles.【Conclusion】This control system met the demand of intelligent control of this transport and was applicable to operation control of other wire rope lifting transport equipment.
Key words:mountain orchard;traction transport;control system;PLC
DOI:网络出版时间:2016-04-0709:0010.13207/j.cnki.jnwafu.2016.05.029
[收稿日期]2014-09-29
[基金项目]现代农业产业技术体系建设专项(CARS-27);公益性行业(农业)科研专项(200903023,201403036);广东省“扬帆计划”引进创新创业团队专项(201312G06)
[作者简介]欧阳玉平(1986-),男,江西吉安人,在读博士,主要从事山地果园运送机械化研究。E-mail:ouyuping1987@163.com[通信作者]洪添胜(1955-),男,广东梅县人,教授,博士,博士生导师,主要从事农业工程、机电一体化和信息技术应用研究。E-mail:tshong@scau.edu.cn
[中图分类号]S229+.1
[文献标志码]A
[文章编号]1671-9387(2016)05-0215-07
网络出版地址:http://www.cnki.net/kcms/detail/61.1390.S.20160407.0900.058.html