新一代运载火箭机器视觉瞄准技术研究
2016-06-05贺长水高明杰解英梅王健博
贺长水,高明杰,解英梅,王健博
新一代运载火箭机器视觉瞄准技术研究
贺长水,高明杰,解英梅,王健博
(北京航天发射技术研究所,北京,100076)
提出一种用于新一代运载火箭的机器视觉瞄准技术,在瞄准仪上集成摄像系统,用于采集被瞄目标图像,利用机器视觉图像识别算法,包括灰度变换、形态学分析、OCR算法等,进行图像识别,实时测量火箭上的被瞄目标相对于瞄准光轴的位置信息。该方法具有高精度、快速、环境适应性强等特点,新一代运载火箭利用该技术实现了智能化无人值守瞄准。
火箭;机器视觉;瞄准
0 引 言
运载火箭地面瞄准系统,是在火箭发射前,将制导系统中惯性器件的方位敏感轴调整到与射向(或与射向成已知角的方向)相垂直[1],或者通过精确测量,获得惯性器件方位敏感轴与射向的偏差角,从而保证火箭初始方位精度,满足运载火箭系统方位入轨精度的要求。
随着深空探测的发展,未来运载火箭将向大直径、大推力方向发展[2],同时要求具备全天候、零窗口发射能力,给火箭瞄准工作带来新的技术问题,例如火箭变形或风晃情况下的快速捕获目标,火箭棱镜大角度安装偏差下的快速跟踪瞄准,无人值守的智能化控制等,这些问题将造成瞄准过程的复杂、瞄准成败的不确定性。
机器视觉瞄准技术是将机器视觉技术用于火箭跟踪瞄准,用镜头、相机和图像识别软件代替人眼,通过数字图像技术,识别火箭上被瞄目标相对于瞄准光轴中心的位移,实时输出被瞄目标位置信息。利用该技术可以实现火箭变形或风晃情况下的快速跟踪瞄准,为智能化无人值守瞄准提供技术支撑。
1 机器视觉瞄准的需求分析
新一代运载火箭具备全天候、零窗口发射能力,并能适应较大的地面风晃,机器视觉瞄准需适应火箭发射前的各种复杂地面环境,在环境光照度、对比度发生变化及被瞄目标局部被遮挡的情况下,都能实时处理,并准确识别被瞄目标中心相对于瞄准光轴中心的位置偏离量。需突破以下关键技术:
a)火箭发射场白天、夜间的背景光照度变化范围大约是100~100 000 lx以上,机器视觉瞄准需适应整个光照度范围;
b)由于机器视觉摄像系统与瞄准仪准直系统共用一套望远镜系统,被瞄目标图像与望远镜目视分线叠加在一起,机器视觉需具备剔除贯穿整个视场的狭长细线的能力,消除狭长分划线对图像识别的干扰,并能完整保留除掉干扰线后的有效信息;
c)当被瞄目标被部分遮挡,或者视场内存在某些多余物干扰等情况时,能正确辨认出被瞄目标,不误判、漏判,保证被瞄目标识别的可靠性。
2 机器视觉瞄准技术方案
机器视觉瞄准系统主要由瞄准仪、镜头及CCD相机、图像识别软件、被瞄目标等组成,图1为系统组成示意。
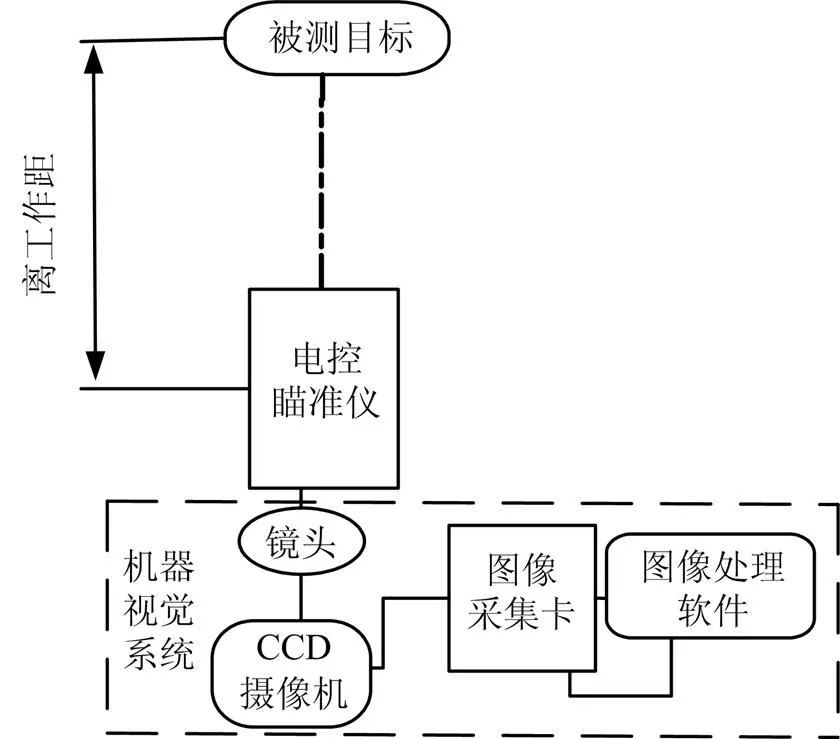
图1 机器视觉系统组成示意
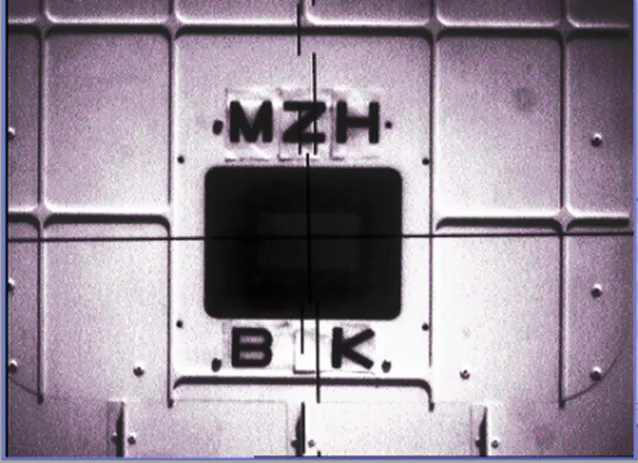
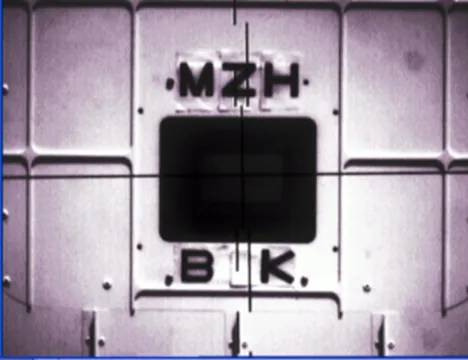
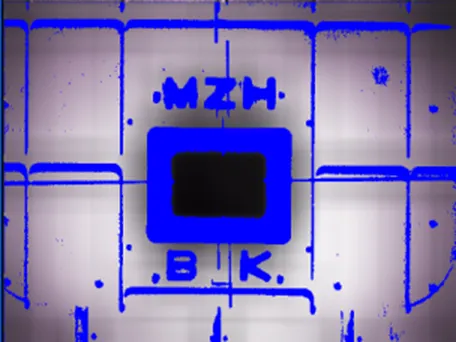
在火箭被瞄目标附近的壳体上,标识特征字符(见图2),利用瞄准仪望远镜系统和成像镜头,将被瞄目标连同标识字符成像至CCD相机的像面上,通过图像识别算法,对图像进行分析处理,实时输出被瞄目标中心相对于目视分划线中心的偏移量。

图2 被瞄目标和特征字符
图3为图像识别流程,主要由初始化、零点标定、单位标定、实时辨认等模块组成。
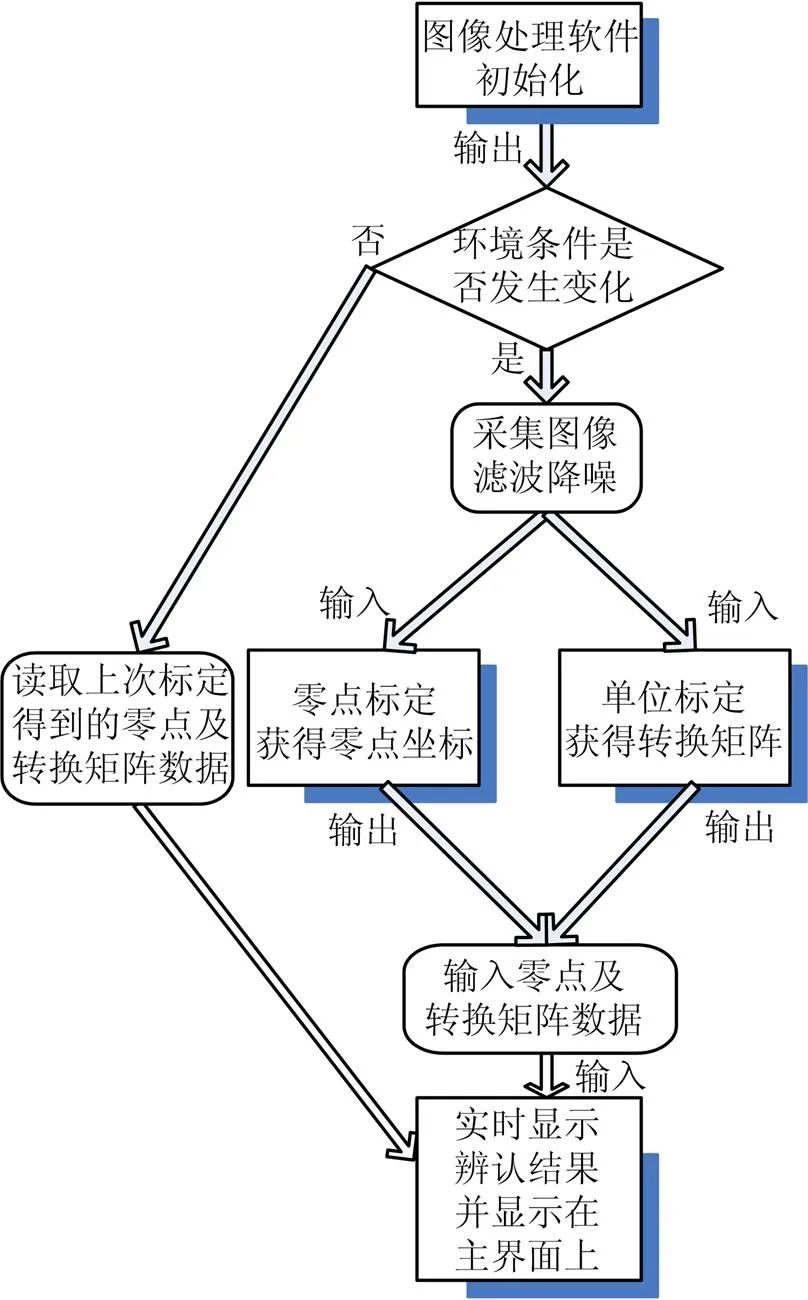
图3 图像识别流程
3 关键技术的实现途径
3.1 适应全天候背景光照度的图像识别方法
为了适应火箭背景光强100~100 000 lx变化,对图像的预处理和后处理中,分别采用自适应灰度直方图均衡化方法和自适应阈值分割法。
a)自适应灰度直方图均衡化方法。
数字图像是由很多离散点组成的,在空间坐标和灰度上都离散化并进行数字编码的图像。用横坐标表示灰度级,纵坐标表示具有该灰度级的像素的频数,即为灰度直方图。
自然状态下获取的图像可能存在过曝光或曝光不足的情况,反映在直方图上,就是直方图所占据的灰度值范围较窄,且集中在灰度值一边,如图4所示。
通过函数变换的方法对直方图进行均衡化,将图像的灰度值分布范围拉宽,并且使灰度级均匀分布。假定原始图像的灰度级总数为,第级灰度值为,图像中具有灰度级的像素数目为,图像中像素总数为,则该图像中灰度级的像素出现的概率(或称频数)[3]为
(2)

a)原始图像
b)灰度直方图
图4 原始图像和灰度直方图
经过均衡化后,图像的灰度值占据了从0~255的整个区间范围,并且灰度分布密度较均匀,如图5所示,。
a)直方图均衡化之后的图像
b)均衡化之后的灰度直方图
图5 均衡化之后的图像和灰度直方图
直方图均衡化增加了图像灰度动态范围,同时也增加了图像的对比度,使图像有较大的亮、暗反差。但在许多细节变得更加清晰的同时,会导致图像的可视粒度变强,即被识别字符笔划变得较粗,变换到频率域来看,有效图像主要分布在较低频的区域,而产生的颗粒噪声主要分布在高频区域,此时通过低通滤波,可有效滤除颗粒噪声的影响。
灰度直方图均衡化不敏感图像的平均灰度。对于不同的背景光照度,均衡化的结果都是将图像的灰度值均匀分布在0~255的区间内,对于过曝光和曝光不足均衡化的结果具有一致性。图像处理效果如图6、图7所示。对比可见,该方法能够解决较大范围背景光强变化对有效图像造成的影响。

a)过曝光的图像
b)均衡化之后的图像
图6 过曝光的原始图像和处理后的图像

a)曝光不足的图像
b)均衡化之后的图像
图7 曝光不足的原始图像和处理后的图像
b)自适应阈值分割方法。
普通的阈值分割方法,需要人为确定一个阈值,灰度值在该阈值范围内的像素点被提取出来,其余像素点被屏蔽。当周围环境光照度发生变化时,仍沿用该阈值,将不能确保有效信息的正确提取。用自适应阈值分割方法,就是当背景光强整体发生了变化,或者被识别物一部分范围内亮度有变化时,通过自动调整阀值,仍能不丢失有效像素,准确地提取出有效信息。
对不同背景光强下的目标,选取不同阀值的效果如图8、图9所示,由图中可以看到,在不同背景光强下,要识别、提取同样的有效信息,选取的灰度阈值差异较大。
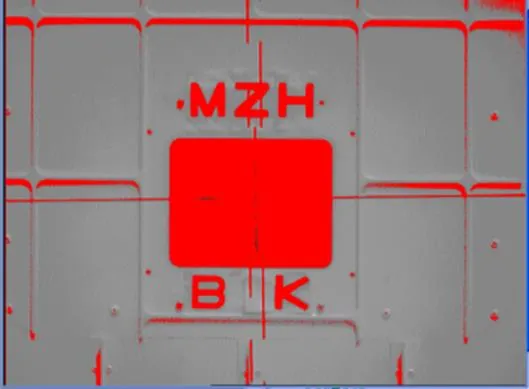
图8 背景较暗、灰度阈值在54~118之间的像素点

图9 过曝光图像、灰度阈值在146~224之间的像素点
自适应阈值分割的具体实现方法如下。
将原始图像进行平滑滤波处理,平滑图像作为背景图像,如图10b所示,然后将背景图像与原始图像进行比较,将同一位置像素灰度值变化较大的点选取出来,效果如图11b所示。从图11中可以看出,自适应阈值分割可以较好的剔除暗区域的干扰。
a)原始图像
b)平滑之后的图像
图10 原始图像和平滑后的图像

a)固定阈值分割法结果
b)自适应阈值分割法结果
图11 固定阈值分割和自适应阈值分割的处理效果
3.2 剔除狭长细线干扰的处理方法
瞄准仪望远镜的目视分划线贯穿于整个图像视场,并和被瞄目标及特征字符重合。另外,火箭壳体上的加强筋在光照下会留下细长的阴影,这些干扰都会降低字符识别的置信度。需要切断干扰线和字符间的连接,使干扰线和字符各自成为独立的目标。采用形态学方法,将腐蚀算法与开运算结合,可以剔除狭长细线的干扰,提高图像识别置信度。具体方法如下。
用式(3)对图像进行腐蚀处理,使干扰细线变细:

腐蚀的程度由结构元素决定,利用结构元素按照一定的规则在图像区域内进行平移,实现对图像的形态学处理[4]。对灰度图像收缩正的峰值,扩展负的峰值,达到图像整体变暗的效果,小亮斑被腐蚀掉,小暗斑变得更大。然后,利用开运算断开细线的连接,剔除掉图像中的分划线和其他狭长细线,保留有效字符的各个笔划。开运算是数学形态学最重要的算法之一,对灰度图像开运算的结果是剔除一些亮的斑点[5],具有平滑边界,滤掉比结构元素小的斑点、突刺,断开狭长连接的作用。图12为开运算前、后的图像。通过对比可知,开运算实现了狭长细线干扰的有效剔除。
a)开运算处理之前的图像
b)开运算处理之后的图像
图12 开运算之前和之后的效果
3.3 目标图像局部被遮挡的处理方法
当目标图像或标识的特征字符“MZHBK”局部被遮挡时,为了确保仍能识别、解算被瞄目标中心偏移量,采取以下方法:
a)单个字符置信度判断。
建立标准字符库文件,将提取的每一个字符图形与字符库文件中的标准字符进行比对,计算出每个图形与标准字符相似度,称其为该图形的置信度。通过筛选置信度,找到与各个标准字符最像的图形,剔除置信度低的图形。
b)5个字符独立辨认。
独立辨认每个目标字符,确保在仅能识别到一个字符时,也能正确解算出被瞄目标中心坐标。
c)字符相对位置判断。
建立字符关系矩阵模块,由于5个字符的相对位置固定不变,对每个字符间的位置关系进行计算,并与字符关系矩阵进行比较,剔除虚假信息,提高识别的可靠度。
d)目标运动速度判断。
根据被瞄目标中心的最大运动速度,以及采样的时间间隔,计算出两次采样的被瞄目标中心的最大偏移量,正确识别出的目标位置不能超过最大偏移量。
e)通过中值滤波剔除异常点。
利用特征字符与被瞄目标中心的位置装换矩阵,用每一个识别出的字符解算出一个中心偏移量,对得到的5个偏移量数据,采用中值滤波的方法滤除其中的异常点。
4 试验验证情况
用火箭瞄准窗等效装置作为被瞄目标,开展机器视觉图像识别试验,瞄准距离与实际工作距离一致,将被瞄目标固定在精密导轨上,在不同光照条件下,按不同步长移动被瞄目标,测试机器视觉图像识别的功能和性能,测试数据见表1。
人为遮挡某些特征字符,验证机器视觉图像识别的正确度,识别被瞄目标中心稳定度,测试数据见表2。
测试结果表明,在室内、室外、白天、夜间不同光照度下,通过机器视觉图像识别,测量被瞄目标中心位移量,精度不大于1 mm。
在某些特征字符被遮挡情况下,经机器视觉图像识别解算的数据稳定不变,即局部字符被遮挡不影响图像识别功能和精度。
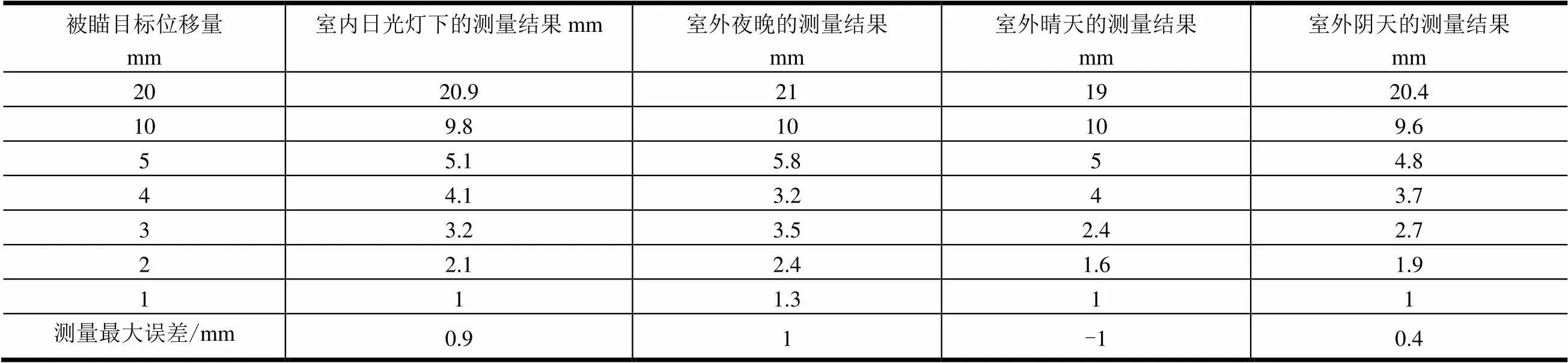
表1 被瞄目标位置测量试验数据
表2 被瞄目标被遮挡情况下的试验结果
续表2
测试条件测试字符是否正确识别被瞄目标中心位置解算偏差/mm 2个字符MZ正确0 MH正确0 MB正确0 MK正确0 ZH正确0 ZB正确0 ZK正确0 HB正确0 HK正确0 BK正确0 1个字符M正确0 Z正确0 H正确0 B正确0 K正确0
5 结束语
将机器视觉技术应用到新一代运载火箭地面瞄准中,通过在火箭表面标示特征字符,利用机器视觉对特征字符进行识别、提取和处理,实时解算被瞄目标中心相对于瞄准光轴中心的偏移量。试验结果表明,在复杂背景、环境光照度变化和干扰存在的情况下,利用该技术,能够有效、可靠地识别被瞄目标,并能准确、实时解算目标偏移量。测量精度不大于1 mm,同时识别时间不超过100 ms,能够满足新一代运载火箭瞄准需求。利用该技术,新一代运载火箭实现了智能化无人值守瞄准。该项技术为机器视觉在火箭发射中的应用探索了一个新方向。
[1] 肖锡珙. 发射技术(中)[M]. 北京: 宇航出版社, 1990.
[2] 何巍, 龙乐豪, 等. 重型运载火箭及其应用探讨[J]. 导弹与航天运载技术, 2011(1): 5-9.
[3] Gonzalez R C, Woods R E. Digital image processing[M]. Beijing: Pearson Education, 2007.
[4] 王娟, 周金芝. 基于Matlab的形态学图像处理研究[J]. 计算机论坛, 2010(4): 135-136.
[5] 尹星云, 时慧坤. 数学形态学在灰度图像处理中的理论和应用[J]. 电脑知识与技术, 2006(17): 191-192.
Research on Machine-vision Aiming Technology for New Generation Launch Vehicle
He Chang-shui, Gao Ming-jie, Xie Ying-mei, Wang Jian-bo
(Beijing Institute of Space Launch Technology, Beijing, 100076)
This paper introduces an aiming technology for new generation launch vehicle based on machine vision. A camera is integrated on a collimator, which is used for collecting the aiming object on the vehicle. Machine-vision image identification algorithm, including gray level transformation, morphology analysis, OCR algorithm and so on, is used to identify the images and measure the position information of aiming object on the launch vehicle real-time which relatives to aiming optical-axis. This scheme has advantages of high precision, rapid and strong environmental adaptability. The schemehas been used for the intelligent unattended operation at aiming system of new generation launch vehicle.
Launch vehicle, Machine vision, Aiming
1004-7182(2016)02-0031-05
10.7654/j.issn.1004-7182.20160207
V556
A
2015-12-04;
2016-02-26
贺长水(1978-),男,高级工程师,主要研究方向为光电瞄准技术
