基于ASSP-MMC-1的步进电机控制器设计
2016-06-02薛敏骅上海广电凯歌实业有限公司上海200062
薛敏骅(上海广电凯歌实业有限公司,上海200062)
基于ASSP-MMC-1的步进电机控制器设计
薛敏骅
(上海广电凯歌实业有限公司,上海200062)
摘 要:设计了基于ASSP-MMC-1的步进电机控制器。首先分析了步进电动机的运行原理及细分技术原理,在硬件设计上,采用了TI公司的MSP430F149单片机作为主控制芯片,主控制单元向驱动电路传递脉宽调制(PWM)信号,通过驱动控制器(ASSP-MMC-1)实现对步进电动机的控制尤其是细分控制,并显示运行参数。在软件设计上,并采用模块化编程和结构化编程思想,最后通过调试实现控制器软硬件设计。
关键词:步进电动机;MSP430单片机;ASSP-MMC-1;细分技术
0 引言
随着控制技术及电子技术的提高,步进电动机的驱动也有了很大的进步,从单电压或单电流驱动到步进电动机的细分驱动。由于早期的晶体管驱动已趋于淘汰,现在多数以高性价比的恒流电源或细分驱动电源代替[1]。尤其是细分技术的出现,可以在不改变电机本身结构的前提下提高步进电动机的分辨率,而且能减小系统震荡,提高电动机步频特性[2]。步进电动机多用于数控车床和机器人系统中。因为在现代工业控制,特别是航空电子领域中,要求完成的工作量大、精度高。利用人工操作不仅劳动强度大、效率低,且难以达到所要求的精度,最重要的是一些工作环境是人类无法到达的地方,这就需要数控机床和自动控制机器人来完成这些高难度工作[3-5]。因此步进电机的研究对未来自动控制领域有着跨时代的意义。
1 细分驱动技术原理
细分驱动技术也被称为微步驱动技术,它细分电机绕组的电流或者电压。具体地,该技术通过常规的矩形波电源供电变为阶梯波供电,然后,或经过若干个阶梯步骤上升到设定值,或以同样的方式从设定值下降到零。虽然这中驱动技术比较复杂,但有以下特点[6]:
(1)在保留步进电机内部结构不变的情况下,使实际的步距角减小,缩小步进之间的误差,同时提高步进电机的分辨率和步距精度,可大大提高对执行机构的控制精度,可用于高精度的控制器中。
(2)细分驱动技术可以使驱动电流的变化幅度值减小,电机转子达到稳定位置时的过剩能量也会随机减少,与此同时减弱了步进电动机的低频振荡问题,获得了转矩增加、噪声降低的优点。
(3)相应的步进电机控制信号的频率提高了N倍(细分数),因此可远离低频谐振频率,克服出现共振的危害,使步进电动机能够比较稳定、安全地工作。
角度细分控制是步进电动机的开环控制技术之一,细分就是把步进电动机的步距角再细分成更小的角度,这样步进电动机的运行就变成了相对匀变速运动方式,并且能够使它在任何位置停步[6-7]。在这里,三相反应式电动机的3拍通电和6拍通电每步转过的度数分别是120°和60°,如图1所示。
由此可知,步进电动机控制中已蕴含了细分技术的原理,即如果每拍通电使定子合成磁动势在空间转动的角度减半,则可使步进电动机的步距角减半[8]。
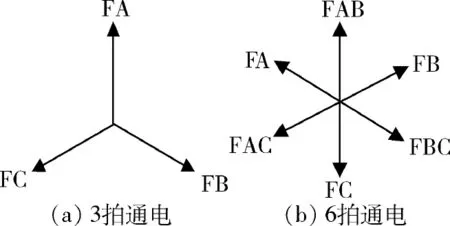
图1 3拍和6拍通电时的磁动势旋转情况
从6拍通电模式可知,若要将每一步细分为4步进行,则合成磁动势的分步情况如图2所示。当由A相通电切换成AB通电时,只要使B相不是由零突变成额定值,而是分为4步完成,每步增加1 /4,则切换过程中合成磁动势就可变为原来的1 /4。与此同理,当AB相通电切换为B相通电时,只要使A相电流不是由额定值突然变为零即可。即如果要把每一步细分为4步完成,只需将相电流分为4个台阶投入或者截断。因此,步距角4细分时电流波形如图3所示。
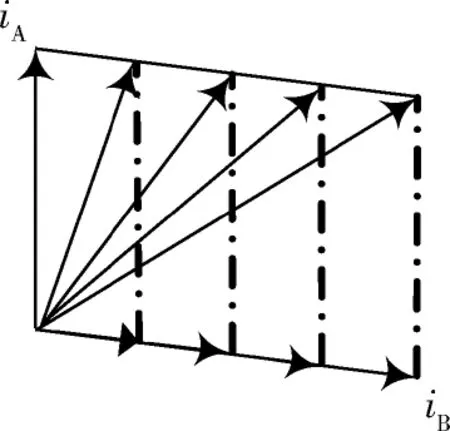
图2 细分时合成磁动势的旋转情况
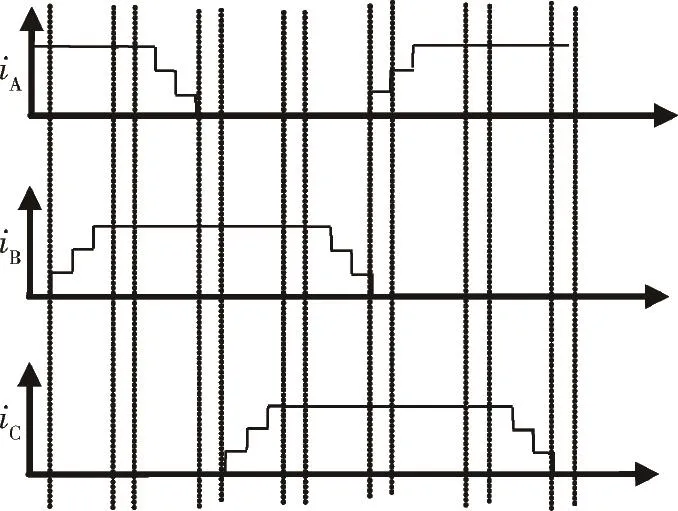
图3 三相6拍4细分各相电流波形
如果将绕组中电流波形细分成N(N为正整数)个台阶的阶梯波,则电流每上升或下降一个台阶时,步进电动机转子就转过一小步。由于当转子按照这种方式转过N小步时,也就是它转过一个步距角的转动,这就是具体实现的步进电动机角度控制的原理[1]。
2 步进电机控制器系统设计
步进电机控制器系统的总体结构在经过详细的方案比较及论证后,设计其总体框图如图4所示。
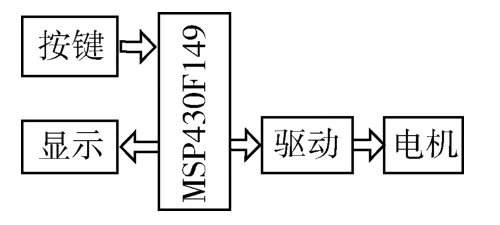
图4 步进电动机控制器总体框图
由文献可知,步进电动机的种类有很多种,但它们的控制方式也有相似之处,图5为步进电动机的控制框图[7]。

图5 步进电机的控制方式框图
2.1基于MSP430F149单片机最小系统模块的设计
步进电机控制器系统的主要控制模块是单片机最小系统,因此选择合适的单片机主控单元尤其重要。在选择单片机应考虑以下几个因素[9]:
(1)存储器容量:存储容量是指数据存储器(RAM)的容量和程序存储器(ROM)的容量。
(2)中断能力:要求单片机的中断数量和中断间隔时间符合实际的需要。
(3)指令系统:要求指令简单,容易修改维护。
(4)价格因素:性价比高。
(5)综合性能。
本设计所选用的单片机是美国德州仪器(TI)公司的MSP430系列中的MSP430F149单片机。因为它将多种外围资源集中在片上,实现了片上系统(SoC),因而大大简化了整个系统的设计,并且它是一种具有超低功耗特性的高性价比单片机系统。
2.2基于ASSP-MMC-1驱动模块设计
MMC-1为多通道两相四线式步进电机/直流电机控制芯片,基于NEC电子16位通用MCU(PD78F1203)固化专用程序实现。通过UART或SPI串行接口,为主控MCU扩展专用电机控制功能,可同时控制三路步进电机或直流电机。步进电机控制原理图如图6所示[9]。
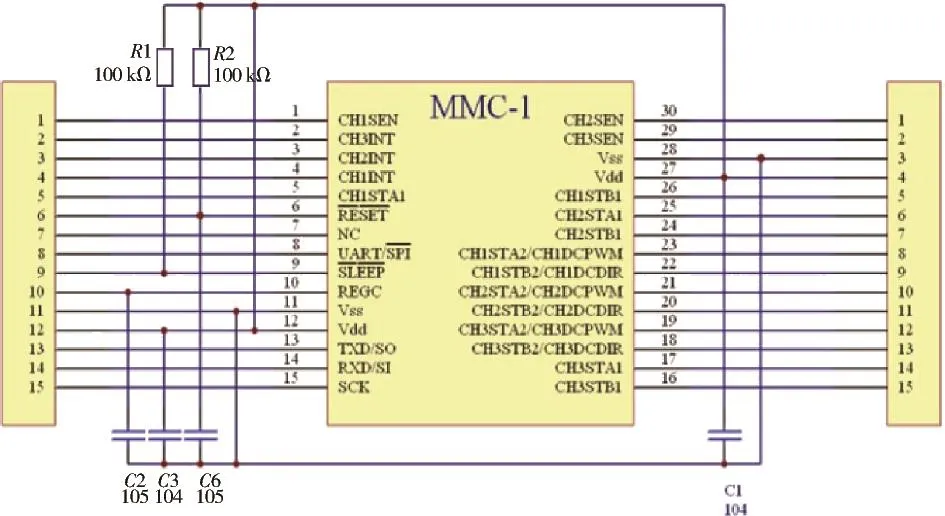
图6 引脚说明图
2.3电源模块设计
本文设计的电源模块共分为3个电压等级:12 V为驱动芯片工作电压,5 V为主要集成电路工作电压,3.3 V为微控制器工作电压。
本设计采用LM2940 -5V和LM117 -3.3 V完成5 V 和3.3V电源的设计,如图7所示。
2.4 步进电机控制器软件系统设计
本设计软件系统总体设计框图如8所示。
本设计由PWM信号驱动ASSP-MMC-1芯片从而控制步进电动机的各种工作状态。MSP430F149单片机拥有捕获/比较(capture/compare)模块,可以输出脉冲宽度随时可调的PWM信号,从而实现步进电机变频控制。
如图9所示,此种PWM信号选择的定时器计数方式为增计数模式。PWM信号的周期可以通过向CCR0中写入数值计算。则该周期的计算公式如下:
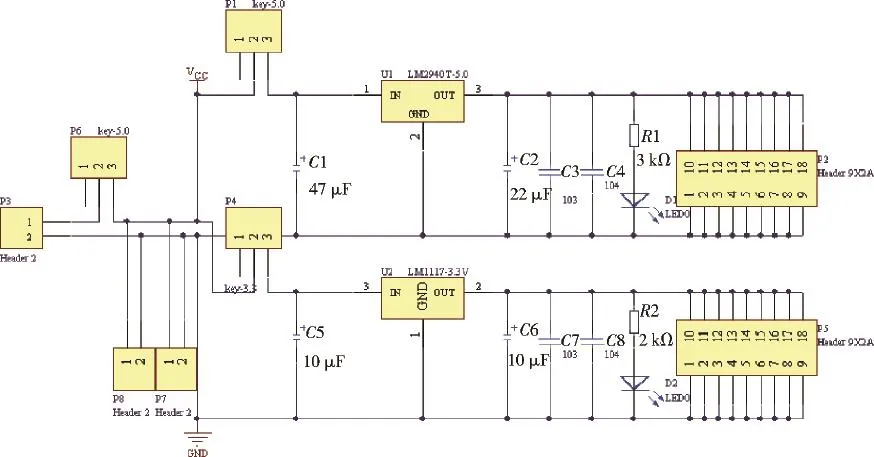
图7 电源模块原理图
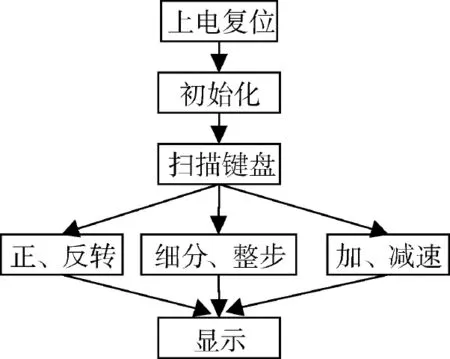
图8 软件设计总框图

图9 PWM形成方式

其中,T osc为定时器选择的始终周期;分频比可为1、2、4、8。
初始化PWM信号的脉冲宽度,通过写入16位寄存器CCR x的值进行初始化。其计算公式与选定的工作模式密切相关,若选定置位/复位模式则数学计算公式如下:

在电机运行过程中,速度控制必不可少,采用PWM调速可比较方便地控制电机转速[10]。当设置PWM的周期较大,并且在一个周期的计数数量足够大时,可以通过PWM比较精确地调节步进电机的转速。在本设计中,通过MSP430F149的定时器TimerA产生PWM波,通过设定定时器的初值来改变PWM波的频率,最终实现改变电机的速度。整个过程采用了开环控制,能够精确地对步进电机速度和方位进行控制。利用MSP430F149定时器TimerA还可以方便地达到控制要求,它能平滑地输出不同的电压,从而实现对步进电机调速。
3 步进电机控制器调试
本设计采用了瑞典IAR System公司推出的IAREW集成开发工具,它是一种高效的嵌入式开发工具,具有丰富的仿真功能。调试过程是:输入源程序的.c文件、编译成.obj文件、单步运行、断电执行、全速执行等。在调试过程中可以清楚地观察程序执行的全过程。在这里,控制器调试模块及调试效果图如图10~图13所示。通过调试步进电机控制器可实现电机正反转、加减速、细分步距角。
图10 驱动模块

图11 电源模块
图12 最小系统模块

图13 总体显示模块
4 结论
(1)本文深入探讨了步进电动机运行特性,对步进电动机的控制原理及细分原理进行了详细深入的分析,并设计出一款新型步进电动机控制器。
(2)对于硬件电路设计,主要分为主控制电路设计和驱动电路设计,在硬件设计过程中增加了一些滤波电路,大大提高了系统的抗干扰能力;对于软件架构的设计,主要运用了模块化设计思想。
(3)本文采用SSP-MMC-1驱动芯片内部可以实现步距角的多种细分控制,从而减少了控制系统的外围硬件电路,使设计更加实用;在进行软硬件的联合调试时,尽可能地优化了控制控制器,提升了控制器性能。
参考文献
[1]吴朝霞,张莹,华建宁,等.控制电机及其运用[M].北京:北京邮电大学出版社,2012.
[2]马文斌,杨延竹,洪运.步进电机控制系统的设计及应用[J].电子技术应用,2015,(41)11:11-13.
[3]庞海燕,谢云,肖姗姗,等.SVPWM伺服控制系统的FPGA设计与实现[J].微型机与应用,2010,29(2):75-78,82.
[4]Wang Yanwen,Zhang Yanping,Ge Biao,et al.Design of steppermotor drive based on AMIS30512[C].Lecture Notes in Information Technology-Proceedings of 2012 International Conference on Electronics,Information and Communication Engineering(EICE2012),Hong Kong,2012:6.
[5]BANIHANI S,AL-W IDYAN K,AL-JARRAH A,et al.A genetic algorithm based lookup table approach for optimal stepping sequence of open-loop stepper motor systems[J]. Journal of Control Theory and Applications,2013,11(1):35-41.
[6]谢辉,唐勇.步进电机发展回顾与前景展望[J].重庆三峡学院学报,2010,26(125):20-28.
[7]柴竹新,沈建华,乐群.一种新型光伏控制器PWM控制方法[J].微型机与应用,2010,29(3):70-72.
[8]BENDJEDIA M,A-AM IRAT Y,WALTHER B,et al.Sensorless control of hybrid steppermotor[J].2007 European Conference on Power Electronics and Applications,2007:1-10.
[9]秦龙.MSP430运用系统开发宝典实例[M].北京:中国电力出版社,2005.
[10]仝建,龙伟,李蒙,等.高精度高可靠步进电机控制系统的设计及应用[J].电子技术应用,2013,39(12):41-44.
薛敏骅(1966 -),女,硕士,工程师,主要研究方向:智能信息处理、智能控制。
引用格式:薛敏骅.基于ASSP-MMC-1的步进电机控制器设计[J].微型机与应用,2016,35(10):82-84,87.
Design of steppermotor controller based on ASSP-MMC-1
Xue Minhua
(Radio and Television Triumph Industrial Co.,LTD.,Shanghai 200062,China)
Abstract:This paper designsa high precision steppermotor controller based on ASSP-MMC-1 chip.Firstly we analyzes the operation principle of steppermotor and subdivision technology principle.For the hardware design,MSP430F149 MCU is adopted as the main control chip.The main unit controls driver circuit and display the running parameter,which produces pulse width modulation(PWM)signals.The drive controller(ASSP-MMC-1)is designed for the subdividing-control of the steppingmotor control.For the software design,the idea ofmodular programming and structured programming is used.Finally through debugging software and hardware design,the design of the controller is realized.
Key words:steppermotor;MSP430;ASSP-MMC-1;subdivision technology
作者简介:
收稿日期:(2016-02-22)
中图分类号:T27
文献标识码:A
DOI:10.19358 /j.issn.1674-7720.2016.09.028