空间光通信精跟瞄处理技术研究
2016-06-02郭振铎中原工学院河南郑州450007中国电子科技集团公司第二十七研究所河南郑州450047
郭振铎,郭 炳(.中原工学院,河南郑州450007;.中国电子科技集团公司第二十七研究所,河南郑州450047)
空间光通信精跟瞄处理技术研究
郭振铎1,郭炳2
(1.中原工学院,河南郑州450007;2.中国电子科技集团公司第二十七研究所,河南郑州450047)
摘 要:首先介绍了精跟瞄探测器的原理与组成,然后重点介绍了精跟瞄探测器的处理算法。最后对精跟瞄处理算法进行了验证,证明采用这种算法处理跟瞄精度能够达到空间光通信的要求。
关键词:跟瞄精度;精跟瞄探测器;投影算法;像元细分;曲面拟合
0 引言
空间卫星激光通信的前提是卫星激光链路的建立,星间链路的建立需要经过捕获、跟踪、瞄准(Acquisition,Tracking,Pointing,ATP)来实现[1]。ATP系统的跟瞄部分由粗跟瞄探测器和精跟瞄探测器两部分组成,粗跟瞄探测器负责提取出目标的大概位置信息,并把该信息传送给精跟瞄探测器进行处理,由精跟瞄探测器完成对目标信息的精确提取和准确定位,因此整个空间光通信的跟瞄精度最终由精跟瞄探测器决定。
空间卫星激光通信距离遥远,对跟瞄精度的要求极高,一般要达到几十微弧度甚至几个微弧度。要建立稳定而有效的通信链路,必须设计一个高带宽、高精度的精跟瞄探测器,这是空间光通信技术的关键所在[2]。
1 精跟瞄探测原理与组成
1.1精跟瞄探测器的原理
粗跟瞄探测器提取目标位置信息后传输给二维万向伺服转台,电机驱动伺服转台转动,使精跟瞄摄像机对准到激光信标光位置。精跟瞄处理器进行目标信息的采集处理及目标位置的精确定位,并将处理结果送操控台进行显示和控制,把信标光俯仰方位偏差送伺服转台,电机驱动二维万向伺服转台精确微调转动,使得精跟瞄摄像机能够更进一步对激光信标光进行精确瞄准,通信光束进一步准直,从而建立稳定而有效的通信链路,然后才能在其相互之间进行激光通信。
1.2精跟瞄探测器的组成
精跟瞄探测器由精跟瞄摄像机和精跟瞄处理器两部分组成,安装在二维万向伺服转台上。
1.2.1精跟瞄摄像机
精跟瞄摄像机由光学系统、CCD摄像机及其控制电路三部分组成。光学系统用于防护激光对探测器的损伤,衰减过强的信标光与背景光。由于精跟瞄探测器对灵敏度和跟踪精度要求很高,从而对探测器的分辨率要求也很高。因此CCD摄像机采用camera link接口高帧频高分辨率的数字摄相机,它具有灵敏度高、信噪比高、谱段宽等优点,能够实现对图像的高速精确采集。摄像机控制电路部分用于控制光学系统滤光片与衰减片选择、CCD摄像机焦距变化与图像输出等,为摄像机提供基本的时序与供电。
1.2.2精跟瞄处理器
精跟瞄处理系统以TI高性能C6000系列DSP芯片和Actel公司APA系列FPGA为核心,实现目标的精确提取与准确定位。
根据采集、处理、显示三部分速度的不同,结合DSP和FPGA的软硬件资源,FPGA完成数字图像的采集、滤波等预处理功能后,再把信号导入到DSP片内,提取出图像中的目标,计算出目标精确的俯仰方位偏差,把采集处理后的图像和目标俯仰方位偏差等信息送至显控台进行实时显示。把目标俯仰方位偏差等信息分别送给伺服机构和精跟瞄电视摄像机,实现与伺服平台的通信以及对精跟瞄电视摄像机的各种控制,保证被跟踪的目标始终处于视场中心,并能够实时清晰地显示出来。
精跟瞄探测器的硬件结构图如图1所示。

图1 精跟瞄处理器硬件结构图
2 精跟瞄探测算法研究
目前提高跟瞄精度最有效的方法就是进行像元细分。像元细分算法精度为0.1~0.5个像素,理想状况可达0.05个像素甚至更小。国防科大谌廷政等人提出了九点四线曲面拟合的面阵CCD细分方法[3]。北京航空航天大学魏新国等人研究了质心法星体细分定位算法[4]。华中光电所谢伦治等人对目标像点亚像素定位的内插细分算法进行了研究[5]。中科院长春光机所李玉峰等人采用二元线性插值质心算法对星点图像进行处理,定位精度优于0.05像元[6]。这些算法数据处理量大,很难满足精跟瞄实时处理要求。
根据上述分析,结合精跟瞄探测器对跟瞄精度要求高、采样频率和处理的数据流量大的特点,提出精跟瞄整个算法分两部分来实现:对目标的跟踪处理采用普通的灰度直方图投影算法,该算法处理速度快,实时性好,在FPGA中用硬件实现。对目标的精确跟瞄采用九点四线曲面拟合亚像元细分算法,该算法可提高原始图像目标定位精度,降低图像灰度的离散度,使得细分后的图像更接近于原始图像,能满足高跟瞄精度的要求,处理工作主要在DSP内部完成。
2.1灰度直方图投影算法
灰度直方图投影算法是将图像灰度分布特征作为目标估计的基本元素,以图像行和列为单位对图像进行灰度累加,灰度累加数据作为特征进行相关运算,一般只能检测像元级的目标运动量。
灰度直方图投影算法首先将采集的二维图像信息进行灰度直方图统计,根据激光信标光的亮度特征计算出图像分割的合理阈值,防止图像信息被错误分割,根据直方图统计结果建立判别规则,进行二值化处理,把采集的整幅图像分割成0和1,分别代表背景和目标信息。
图像分割完成后就开始进行灰度投影处理。假设处理的一幅图像大小为M×N。灰度投影处理就是将M×N的整幅图像的二维灰度信息F(i,j)映射成两个独立的一维投影序列。具体公式如下:

式中i=1,2,3,…M,j=1,2,3,…N,X(i)、Y(j)分别表示图像F(i,j)第i行和第j列的灰度投影值。
根据上述公式可计算激光信标光的X、Y中心,即目标的中心位置信息。采用同样的投影处理算法,可得到目标的X、Y方向投影长度,即目标的水平垂直长度。根据上述处理结果,可实现对目标的稳定跟踪。
2.2像元细分算法
每个细分亚像元的灰度值主要由水平、垂直和两个对角线四个方向的灰度变化趋势综合决定。利用每个方向上已知的三个以上像元灰度值,可拟合出四条曲线,根据这四条拟合曲线在细分亚像元对应位置上的细分插值,可求出一个能比较真实反映当前点图像变化情况的灰度值。具体计算方法如下。
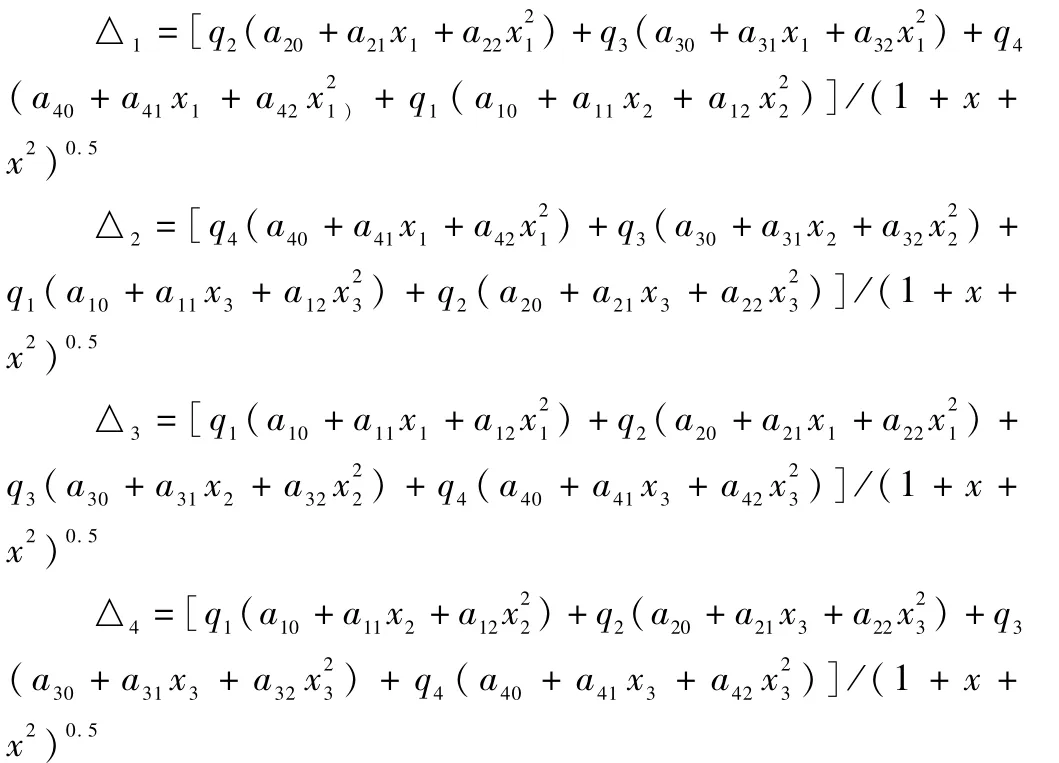
二细分后,一个像元被细分成四个亚像元,设对应的灰度值函数为:Δ(Δ1,Δ2,Δ3,Δ4)。四个方向拟合曲线上的三个细分插值点位置坐标相同,令四条曲线在三个细分插值点上的插值灰度分别为G1(g1,g2,g3,g4),G2(g′1,g′2,g′3,g′4)和G3(g″1,g″2,g″3,g″4)则:
式中的x1为细分插值点的坐标值。同样可求出G2(g′1,g′2,g′3,g′4)和G3(g″1,g″2,g″3,g″4)。将四条灰度拟合曲线在细分亚像元处的灰度插值加权求和,得到细分亚像元的灰度值Δ(Δ1,Δ2,Δ3,Δ4)。
展开后细分的灰度值如下:

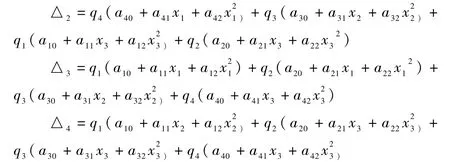
其中,q1、q2、q3和q4分别为曲线1、2、3、4在细分像元处的灰度加权值。利用以上公式即可对面阵CCD图像进行二细分插值。同理可推导四细分插值和八细分插值公式。该方法编程容易,计算简便,图像处理速度快,可用于准实时处理,且提高了目标图像的定位精度。九点四线曲面拟合面阵CCD细分新方法不仅使细分后的图像与原图像保持了很高的相关度,且保持了原图像的边缘效果,极大地降低了细分模糊效应。
但上述方法细分处理后的图像会出现过饱和,需归一化处理,并需对处理后的像元灰度值上下限进行限制,上限为255,下限为0。归一化处理后的最终细分灰度值如下:
上述处理计算量大,对整幅图像细分处理时间不够,因此需选择合适的处理区域。区域过小则信号能量溢出,产生截断误差;区域过大则噪声急剧增加。二者均使信噪比降低,质心定位精度下降。根据光斑的大小不同,一般选择3×3、4×4或5×5的区域。
本文以灰度直方图投影提取目标为基础,以目标质心为中心,取4×4的区域进行像元细分插值运算。处理后光斑内像元节点数增加,避免了因图像饱和造成的光强量化错误。
图像细分是放大的过程。二细分后一个像元变成四个亚像元,灰度值对应四个。二细分的亚像元是一个四倍放大的图像,水平放大2倍,垂直放大2倍。跟踪精度要达到更精细,需进一步进行细分,把二细分的每个亚像元再细分成四个更精准的亚像元。即一个像元经过二细分处理变成16个亚像元。水平方向放大4倍,垂直方向放大4倍。4×4个像元经过二次二细分处理变成256个亚像元。这样处理可更精准有效地对准空间激光信标光,最大限度地提高跟瞄精度,且经过细分处理,图像边缘过渡平缓,大大减弱了马赛克现象,使得细分后的图像能够最大限度地接近原始图像。
3 算法验证
根据上面的算法研究,采集一幅图像进行算法分析处理,处理结果如图2所示。
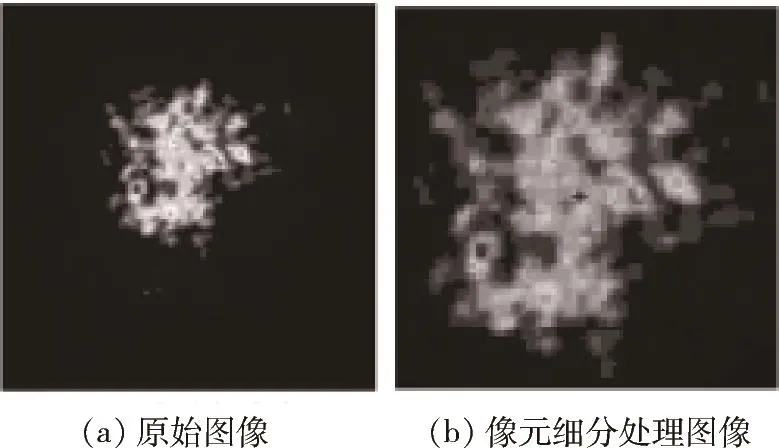
图2 原始图像与仿真处理图像
像元细分处理后突出了图像细节。说明曲面拟合细分能够提高图像的清晰度。同时跟踪处理的精度也大幅提高。
4 结论
通过上述设计分析、算法研究和仿真试验说明,采用灰度直方图投影算法与九点四线曲面拟合像元细分算法相结合的方法,通过选择适当的目标区域,能够把精跟瞄探测器对激光信标光的跟瞄精度提高到几个微弧度,能够达到空间光通信对跟瞄精度的要求。该方法定位精度高,抗干扰能力强,与传统的灰度加权质心的方法相比更能提高细分效果,与曲面拟合算法相比占用资源少,处理简单实用。
参考文献
[1]刘静江,黄永梅,傅承毓.空间光通信ATP系统中的跟瞄技术[J].光电工程,2003,30(4):4-7.
[2]谢木军,马佳光,傅承毓,等.空间光通信中的精密跟踪瞄准技术[J].光电工程2000,27(1):13-16.
[3]谌廷政,吕海宝.CCD细分技术方法研究及应用[J].光学学报,2002,22(11):1396-1399.
[4]魏新国,张广军,江洁.星敏感器中星图图像的星体细分定位方法研究[J].北京航空航天大学学报,2003,29(9):812-815.
[5]谢伦治,卞洪林,王振华.面阵探测器的像点亚像素定位研究[J].光学与光电技术,2003,1(2):51-56.
[6]李玉峰,郝志航.星点图像超精度亚像素细分定位算法的研究[J].光学技术,2005,31(5):666-671.
郭振铎(1982 -),男,硕士,讲师,主要研究方向:图像处理。
郭炳(1981 -),男,本科,工程师,主要研究方向:光电图像处理。
引用格式:郭振铎,郭炳.空间光通信精跟瞄处理技术研究[J].微型机与应用,2016,35(10):43-45.
Research on fine tracking and pointing processing techniques for space optical communication
Guo Zhenduo1,Guo Bing2
(1.Zhongyuan University of Technology,Zhengzhou 450007,China;2.China Electronic Technology Group Corporation Twenty-seventh Institute,Zhengzhou 450047,China)
Abstrac t:At first,the article introduces the principle and prostitute of fine tracking and pointing detector.Then,the processing algorithm of fine tracking and pointing detector is introduced importantly.At last,the processing algorithm is tested.The resut verified that the tracking and pointing processing accuracy can meet the requirement of space optical communication by using this algorithm.
Key w ords:tracking and pointing accuracy;fine tracking and pointing detector;projection algorithm;pixel subdivision;curve fitting.
作者简介:
收稿日期:(2016-01-30)
中图分类号:TP391.4
文献标识码:A
DOI:10.19358 /j.issn.1674-7720.2016.09.015
