基于GSM网络的家用无线机械手
2016-06-02山东科技大学刘国洋
山东科技大学 刘国洋 李 楠
基于GSM网络的家用无线机械手
山东科技大学 刘国洋 李 楠
【摘要】为更好更便捷地体验智能家居,本文设计了一款基于GSM网络的家用无线机械手,阐述了系统各模块协调工作的原理。该设计从市场需求出发,实现了现有智能家居的一般功能。
【关键词】智能家居;STC12C5A60S2单片机;西门子TC35I模块;HC-05蓝牙模块
0 引言
众所周知,智能家具的概念在慢慢深入人心,市面上出现了很多成套的智能家具产品,,人们出差在外控制和监视家里的东西也有了很多种用成套智能家具控制的方案,但这些智能家具产品非常“固定”,必须成套购买相应产品才能有良好的用户体验。现在智能家居市场普及程度并不高,所以现在市场缺少一种过渡产品来让更多的人了解和体验智能家居,这就是我们这个产品设计的初衷。本产品努力做到让用户在尽可能少的改变现有家具的基础上最大程度地体验智能家居带给我们的便捷。
1 总体设计
这是一种可扩展的智能家居系统,由一个在室内放置的可移动的GSM发射接收控制台和多个机械手构成,每个机械手都可以“学习”和“记忆”指定的动作,我们可以把这些机械手固定在家中各种地方,比如开关旁,按钮旁,甚至房门旁等等,对于每个机械手我们都可以“教”给它一定的动作,一旦收到指令后它能像示教器一样把动作原样再做一遍。比如我们可以“教”给机械手一个按下开关的动作,当它一旦受到相应指令后它就会按下这个开关。本设计控制和信息处理部分主要使用STC12C5A60S2单片机,此单片机的特点是有8路10位AD、EEPROM、4个定时器、两个串口、SPI接口,还有WATCH_DOG防止程序跑飞。
系统总体框图如图1所示:
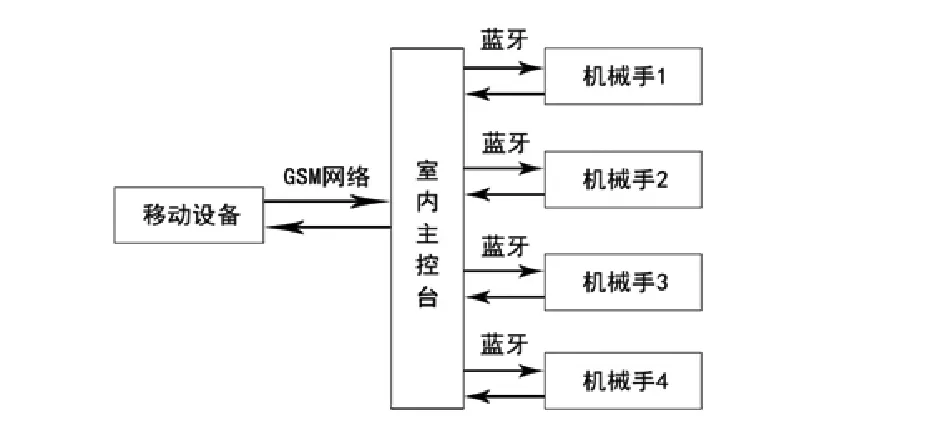
图1 系统总体框图
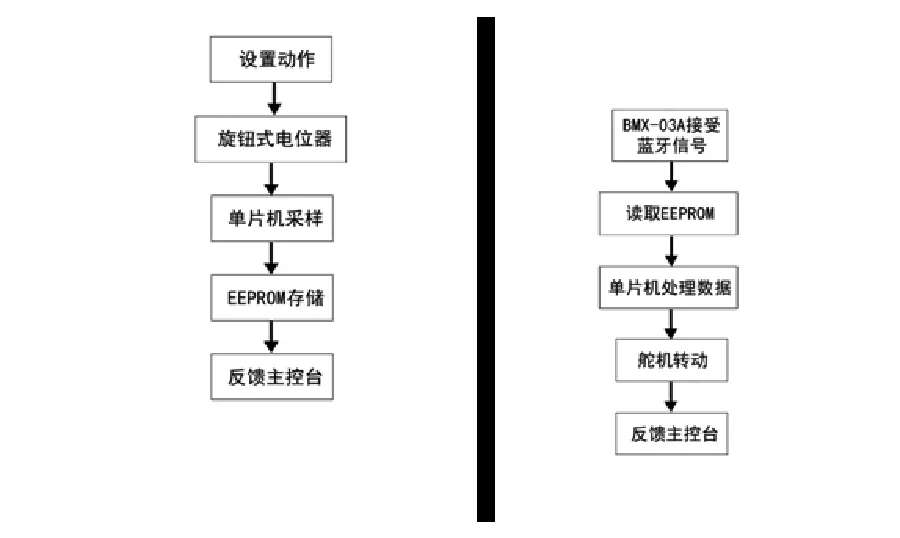
图2 机械手工作框图
2 硬件设计
机械手部分的主要零部件有:STC12C5A60S2单片机、旋钮式电位器、MG996舵机及舵机架、HC-05蓝牙接受模块、9V电源。每个舵机的一端都和一个旋钮式电位器相连,当按下“设置”按钮的时候,我们可以用手给机械手做一遍动作,AD转换开始,AD转换器将从电位器输出的电压模拟量转换成数字量,由单片机用一定频率(本设计的频率是10HZ)将每个舵机转的角度和时间均转换成数字量,然后用指定格式编码并保存。STC12C5A60S2单片机用来记录、分析和存储每个舵机转过的角度和时间到内置存储器EEPROM中。当机械手接受到来自主控台的指令后读取内置存储器EEPROM中数据,根据此数据实现控制各个舵机实现动作的再现。为了实现机械手的长时间待机我们也采用了9V大容量电池,通过降压板为模块组供电。目前测试的是使用两个自由度、两个MG996舵机的机械手,后续可以设计和添加更多自由度,功能更多的机械手。
机械手工作框图如图2所示。
主控台主要起到消息的接收汇总和发出的作用。主控台的主要部件有:TC35I模块(GSM模块),STC12C5A60S2单片机,HC-05蓝牙模块、5V电源。在目前中国的网络环境下,GSM网络覆盖范围是最广的,所以用GSM做控制台可以做到只要手机有信号就能控制家里的机械手。TC35I模块具有体积小,重量轻,低功耗,操作简便,功能强大,非常适合在本设计中使用。GSM模块硬件设计框图如图4所示。在主控部分的发射模块使用HC-05蓝牙模块,同时在各个机械手上也用HC-05蓝牙模块进行接收。使用蓝牙连接的好处是保证了产品的可扩展性、抗干扰性和保密性,同时在家里用手机也可以通过连接指定的机械手来实现控制。
主控台工作流程图如图3所示。
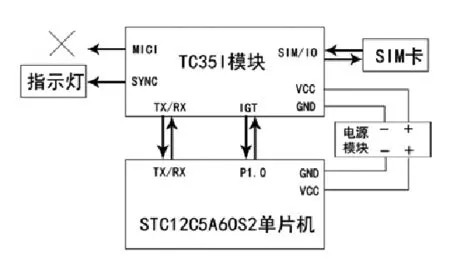
图3 主控台工作流程图
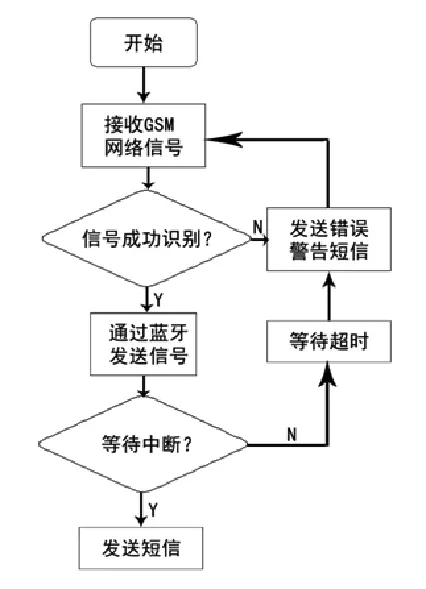
图4
3 软件部分
本系统控制部分主要在GSM模块、蓝牙模块和舵机模块的控制上。
GSM模块采用西门子的TC35I模块,它支持标准AT指令集和部分
扩展AT指令集。对于短信接收方面我们采用了直接接收方式,即将AT+CMI参数设置为AT+CNMI=1,2,0,0,1或AT+CNMI=2,2,0,0,1,当主控台接收到来自手机发送的指定命令后直接将信息通过串口发送至MSP430,使其产生串行中断来捕获和处理指定消息。对于短信发送方面我们用文本方式通过串口发送AT+CMGS和指定手机号码到模块上,模块会发出指定短信。
蓝牙模块采用BMX-03A模块,它也支持标准AT指令集,同时支持一对多和多对多的多机通讯。初始化时将主控台的蓝牙模块通过设置AT+ROLE=1设置为主机,而各个舵机的蓝牙模块都为从机。经测试在一般家庭中都能实现正常的收发。
舵机模块采用MG995舵机,它的原理是通过控制固定周期不同占空比的矩形波来控制舵机转过的角度。要执行的动作数据存放在EEPROM中,当接收到指令时通过IIC协议读取芯片中的数据实现对舵机转过角度和运行时间的控制,这在MSP430单片机上用一个定时器即可完成。
4 结语
本文针对现有的智能家居系统成本高昂、可扩展性差等缺点,研究设计了一种基于GSM网络的家用无线机械手。此系统各个模块分工明确,可扩展性强,可以作为智能家居的替代产品和过渡产品来使用。本系统通过GSM模块接受信号,可以实现远距离控制;室内主控台通过低功耗蓝牙模块与各个机械手建立连接,增强了可扩展性和保密性;各个机械手都用可以根据人的动作来存储动作数据,增强了机械手的易用性和灵活性。与传统智能家居系统相比,该系统还具有价格便宜、节能、功能强大等优点,因此有广阔的市场空间。
参考文献
[1]王浩鸣.蓝牙技术的安全认证机制[J].无线电工程,2002,32(4)﹕37-40.
[2]刘举平,余为清.基于GSM技术的智能家居远程控制器设计[J].嵌入式系统应用,2010,26(4)﹕45-46.
[3]吴玉田,王瑞光,郑喜凤,等.GSM模块TC35及其应用[J].计算机测量与控制,2002,10(8)﹕557-560.
[4]陈幼平,马志艳,袁楚明,周祖徳.六自由度机械手三维运动仿真研究计算[J].计算机应用研究,2006,6﹕205-207.
[5]赵凤申.焊接机器人手部示教控制方法研究[D].杭州﹕浙江大学,2006.
刘国洋(1995—),男,山东青岛人,大学本科,主要研究方向为测控技术与仪器。
李楠(1996—),女,山西临汾人,大学本科,主要研究方向为测控技术与仪器。
作者简介: