基于GMR传感器的无线车位检测算法研究及系统的实现
2016-05-31张森白茹朱礼尧钱正洪
张森 白茹 朱礼尧 钱正洪

摘 要:文中研究了一种基于自旋阀巨磁阻(GMR)传感器的车位监测算法,设计并实现了一个车位管理系统。车位监测算法的核心是二级基线跟踪算法,算法设置一大一小两个阈值,通过小阈值控制基线跟踪,通过大阈值判断车位状态。磁传感器采用东方微磁公司研发的高灵敏度、低功耗的GMR传感器SAS022-1和VA100F3。系统通过检测车辆对地磁场的扰动大小来判断停车位是否存在车辆,并将车位信息通过ZigBee无线传感网络发送到服务器,由上位机软件显示车位信息。实验表明,该系统体积小、功耗低、检测精度高,能够广泛用于停车场管理。
关键词:三轴GMR传感器;ZigBee;车位检测;停车管理;基线跟踪
中图分类号:TP274 文献标识码:A 文章编号:2095-1302(2016)05-00-05
0 引 言
随着我国经济的发展,汽车保有量正逐年攀升,对城市交通系统造成了巨大的压力[1],给城市带来了严重的停车问题。以目前数据来看,汽车泊位的数量远远满足不了停车的需要,停车已经成为制约城市经济发展、妨碍市民日常生活的大问题。因此,解决城市停车问题不仅可以缓解城市交通,还对促进城市经济发展具有重大意义。提高停车场的工作效率成了解决停车问题的一种思路。
高效的停车场管理系统可大大提高停车场工作效率,其中车位检测技术是关键。目前国际上常用的车位检测技术[2]有超声波检测[3]、红外检测[4]、环行线圈检测[5]、视频检测、地磁传感器检测[6]。超声波检测具有安装方便,寿命长,成本低等优点,但是探测精度易受环境影响,抗干扰能力差;红外检测有良好的直线性,抗干扰性能好,成本低,响应速度快,但是极易受到环境的影响,特别是热源的影响;环形线圈检测技术成熟,应用广泛,抗干扰能力强,但是安装麻烦,施工强度大,易损坏,寿命短,维护费用高;视频检测的单一摄像头可以同时检测多个车位,起到安防作用,但是成本高,技术成熟度不够;地磁检测是一种新的检测方法,它的优点是精准度高、可靠性高,不易受环境影响,成本低、体积小,适用于各种停车场,能够应付各种恶劣天气。
1 检测原理
地球自带0.5~0.6高斯的磁场,地球表面各处的磁场强度大小和方向都因地而异,地表磁场受各种因素如天气、周围环境的影响会随着时间而发生改变。铁磁性物体会对磁场的分布产生扰动,具体的扰动和铁磁性物体的结构、形状和材质有关。
众所周知,汽车绝大部分部件的材质是钢材或者铁质,所以汽车会对地磁场产生很大的扰动,通过磁传感器检测地磁的扰动,对磁场变化信号采样进行适当的滤波和算法分析,便可判断是否有车辆存在。
本文采用的东方微磁公司的自旋阀巨磁电阻(GMR)传感器芯片是用于检测磁场的惠斯通电桥结构。当向电桥供电后,在敏感轴方向加入磁场强度会引起电桥电阻元件的变化,导致电桥输出端的电压产生相应的变化,即传感器的输出电压变化量与外加磁场强度成正比,具有宽测量范围、高灵敏度、低磁滞、低温漂和优良的线性度等特点。
系统采用TI公司生产的CC2530作为主控芯片,东方微磁公司的巨磁阻传感器使用ZigBee技术组成传感器网络[7],当有车辆停在监控节点上方时,三轴巨磁阻传感器可以探测到磁场的变化,监控节点通过传感器网络把车位状态信息发送给协调器,协调器再把信息转发到服务器,通过客户端便可查询到车位信息。车位检测系统流程如图1所示。
图1 车位检测系统流程
2 检测算法
磁传感器采集的信号需要进行滤波、去噪处理,地磁场在短时间内受环境、天气影响非常小,基本处于平稳状态,但是从长时间来看,地磁场自身可能会发生微弱的变化或者受到环境、天气、周围建筑的影响而发生改变。因此,车位检测首先需要检测出背景磁场强度的大小,即基线值。基线值在短时间内是平稳的,但是从长时间来看,基线值是变化的,所以基线跟踪算法是车位检测的关键。
2.1 信号滤波
系统使用滑动滤波[8]对磁传感器采集的信号进行滤波处理,具体步骤是对当前信号及前N-1个信号做均值处理,这种方法可有效去除噪声干扰,对磁场信号M(k)做N次滑动滤波处理后的均值A(k)如公式(1)所示:
在公式(2)中,Bi(k)代表基线值,αi代表加权系数,Ai(k)代表传感器采集的磁场信号大小。加权系数越大,基线跟踪速度越快。
但现实情况是,在车辆停入车位的过程中,已经对周围的地磁场产生了较大的扰动,但数据是小于阈值的,在这种情况下会执行基线跟踪,基线值会发生改变,检测正确率会降低。为了解决这个问题,必须保证在这种情况下基线值保持不变,一种方法是用较小的加权系数值αi,但是较小的加权系数会使跟踪速度大大降低。
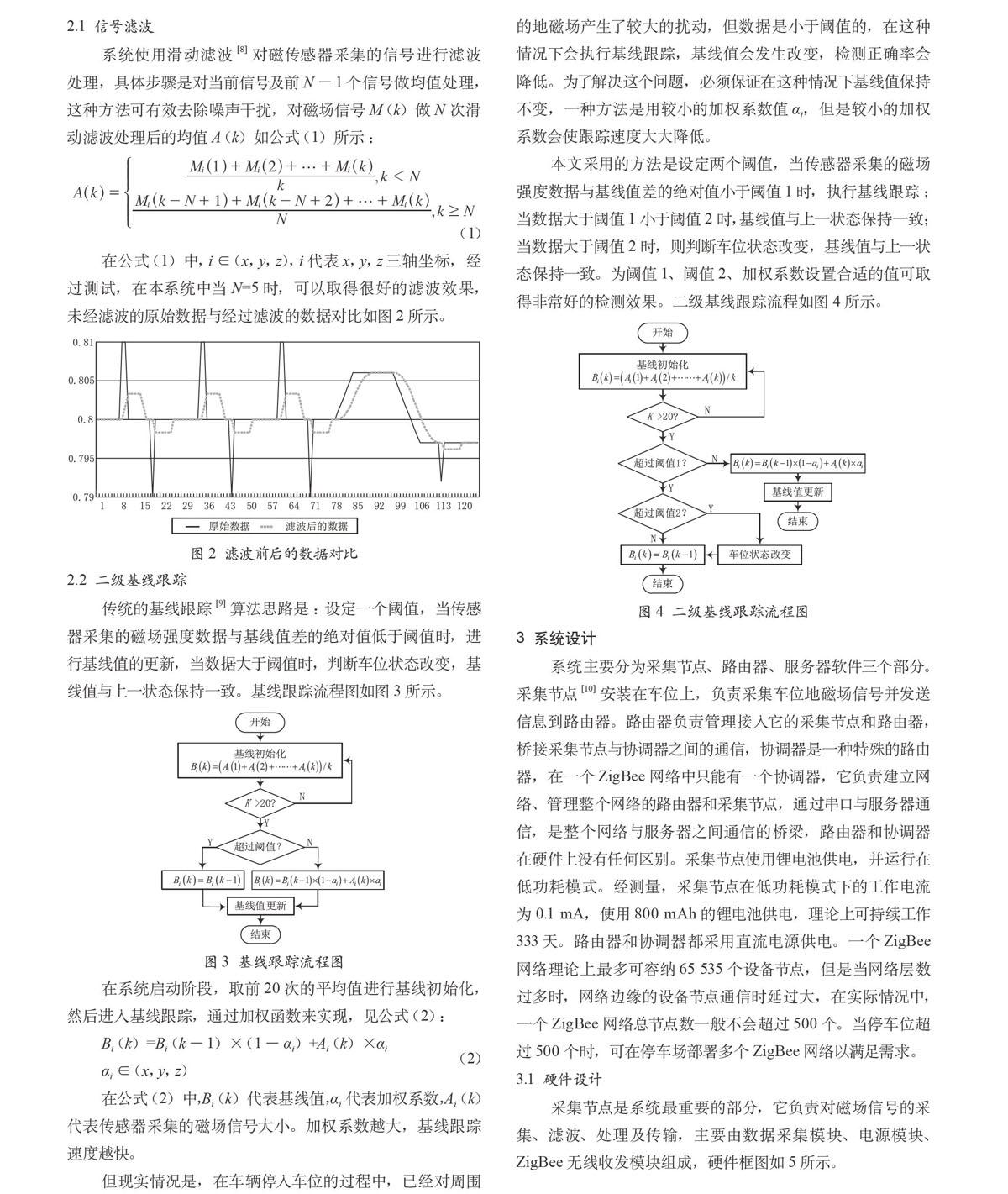
本文采用的方法是设定两个阈值,当传感器采集的磁场强度数据与基线值差的绝对值小于阈值1时,执行基线跟踪;当数据大于阈值1小于阈值2时,基线值与上一状态保持一致;当数据大于阈值2时,则判断车位状态改变,基线值与上一状态保持一致。为阈值1、阈值2、加权系数设置合适的值可取得非常好的检测效果。二级基线跟踪流程如图4所示。
图4 二级基线跟踪流程图
3 系统设计
系统主要分为采集节点、路由器、服务器软件三个部分。采集节点[10]安装在车位上,负责采集车位地磁场信号并发送信息到路由器。路由器负责管理接入它的采集节点和路由器,桥接采集节点与协调器之间的通信,协调器是一种特殊的路由器,在一个ZigBee网络中只能有一个协调器,它负责建立网络、管理整个网络的路由器和采集节点,通过串口与服务器通信,是整个网络与服务器之间通信的桥梁,路由器和协调器在硬件上没有任何区别。采集节点使用锂电池供电,并运行在低功耗模式。经测量,采集节点在低功耗模式下的工作电流为0.1 mA,使用800 mAh的锂电池供电,理论上可持续工作333天。路由器和协调器都采用直流电源供电。一个ZigBee网络理论上最多可容纳65 535个设备节点,但是当网络层数过多时,网络边缘的设备节点通信时延过大,在实际情况中,一个ZigBee网络总节点数一般不会超过500个。当停车位超过500个时,可在停车场部署多个ZigBee网络以满足需求。
3.1 硬件设计
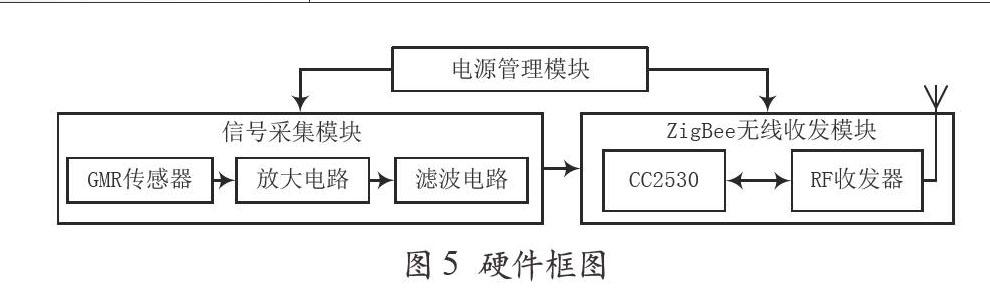
采集节点是系统最重要的部分,它负责对磁场信号的采集、滤波、处理及传输,主要由数据采集模块、电源模块、ZigBee无线收发模块组成,硬件框图如5所示。
图5 硬件框图
GMR传感器是信号采集模块的核心,系统使用东方微磁公司生产的双轴SAS022-1和单轴VA100F3自旋阀巨磁阻传感器组合成三轴传感器,通过对三个互相垂直方向的磁场测量,从而更准确的进行车位检测。由于GMR传感器[11]的输出是毫伏级,不便于直接采集使用,所以系统使用LM2904低功耗双运算放大器,对信号放大100倍;使用一阶无源RC低通滤波电路对放大后的信号进行滤波处理,滤除低频信号。信号采集模块原理图如图6所示。
系统各功能节点的内部标准电压是3.3 V,而锂电池提供的电压是3.7 V,故采用TPS63001芯片来实现3.7 V~3.3 V的电压。TPS63001的有效率高达96%,在3.3 V的降压和升压模式中输出电流达到1 200 mA和800 mA,器件的静态电流小于50 uA,输入电压范围为1.8 V~5.5 V。电源管理模块原理图如图7所示。
3.2 软件设计
采集数据之后,主控芯片CC2530需要对数据进行算法滤波、执行基线跟踪,并且使用ZigBee技术组建传感器网络[12]。
系统采用TI公司推出的半开源ZigBee协议栈ZStack,它是基于轮询式的操作系统,定义了物理层、媒体介质访问层、网络层和应用层,用户只需要根据需求编写应用层的程序即可实现ZigBee通讯。系统使用协调器、路由器、终端设备(采集节点)三种设备类型。
协调器启动后会创建一个ZigBee网络,当路由器或终端设备启动后会自动搜索可用的ZigBee网络并自动加入网络,向父节点发送上线通知,包括节点类型、节点设备id、短地址,在网络中,可根据设备id、短地址进行通信。当终端设备成功加入网络后,便会采集磁场数据并分析,通过网络将车位信息发送到协调器,协调器通过串口与服务器通信,将信息发送到服务器软件上。
服务器软件使用Java语言编写,由串口通信模块、数据解析模块、显示模块三部分组成。
串口通信模块负责底层串口通信,接收、发送串口数据;数据解析模块负责将通信模块的数据进行解析,按照约定的数据格式进行数据完整性校验,解析出数据帧中的数据,数据帧格式如图8所示;显示模块负责将数据解析模块解析出的数据进行分析并以图形界面形式进行显示,软件界面如图9所示。
4 实验分析
4.1 车辆磁场分布
对车位进行有效检测的关键是设置合适的阈值,这需要测量分析车辆底部不同位置对地磁场的扰动大小。采集节点放置在车位左侧、右侧或中央都可以,但考虑到实际情况,车辆不一定能够准确停在车位正中心,所以采集节点应该放置在车位左右中心位置。
本文在东西和南北朝向的车位上进行测试,车辆为福特汽车。在南北方向车位上,车辆向南行驶;在东西朝向车位上,车辆向东行驶。正北为x轴正方向,正东为y轴正方向,垂直于地面向上为z轴正方向。在测试中,采集节点放置在车位中央,汽车低速行驶,汽车中心从采集节点上经过。图10为本文的测量方法示意图。
图8 数据帧格式
图9 软件界面图
图10 测量示意图
其中,南北方向与东西方向停车位三轴磁场曲线图如图11和图12所示。从图中可以看出,当车辆距离采集节点较远时,采集节点周围地磁场基本没有变化;当车辆从采集节点上方行驶过去时,周围地磁场发生较大变化,且东西方向与南北方向车位的 x、y、z轴的变化趋势是一致的。由于磁传感器各个轴的偏置电压不同,因此每个传感器的偏置电压也有所不同,且在同一地点各个方向的磁场强度不同,所以x、y、z三轴数据在没有车辆影响时会有所不同。
图11 南北方向x、y、z轴磁场曲线图
图12 东西方向车位x、y、z轴磁场曲线图
为了进一步说明问题,采集无车辆影响情况下磁场值的均值作为基线电压值,绘制x、y、z轴与基线电压差值曲线如图13所示。由于发动机和前车轴的影响,在车头附近x、y轴磁场出现了一个波峰,z轴出现了一个波谷,在后车轴的影响下,三个轴出现了相反的变化。在车尾之后,x、y、z轴曲线并没有完全回归到0,这是因为传感器发生了磁滞现象。磁滞现象是指铁磁质磁化状态的变化总是落后于外加磁场的变化,在外磁场撤消后,铁磁质仍能保持原有的部分磁性[13]。本系统的二级基线跟踪算法可消除磁滞现象对检测精度的影响。
(a) 南北方向车位x、y、z轴与基线电压差值
(b) 东西方向车位x、y、z轴与基线电压差值
图13 各个方向车位的x、y、z轴与基线电压差值
4.2 车位判定
由于单一轴向的磁场容易受车辆停车方向与位置的影响,综合利用x、y、z轴三个方向的磁场数据可以大大降低单一轴向上的磁场所受的影响,所以使用x、y、z轴与对应基线值差的绝对值之和进行车位判定。图14所示是东西、南北方向车位x、y、z轴与基线值差的绝对值之和,基线值指在无车辆影响的情况下采集节点采集的磁场值的均值。
(a)南北方向车位三轴与基线值差的绝对值之和
(b)东西方向车位三轴与基线值差的绝对值之和
图14各个方向车位的x、y、z轴与基线值差的绝对值之和
根据图14可知,在车辆底部大部分范围内,图中数据都远大于0,采集节点可以安装在停车位中大部分位置。考虑到实际情况,为了降低周围车辆的影响,避免采集节点被车辆碾压,采集节点应安装在停车位正中央。可建立合适的阈值进行基线跟踪,通过阈值与图中数据之间的关系判断该车位是否有车辆停入。
由于地磁场自身受天气、温度、人类的走动等影响的变化是微小的,较大的阈值1会降低检测精度,经试验测试,将采集节点放置在房间内,连续采集48小时的地磁场数据,该次采集到的地磁场电压最大的变化值为3.2 mV,本系统在3.2mV的基础上加上一倍的容错值,所以本系统阈值1设置为6.4 mV。从图14中可知,在车辆底部大部分范围内,图中数据都大于50 mV,阈值2设置为50 mV可以覆盖车辆底部较大的范围,所以,本系统阈值2设置为50 mV。
将车位检测系统安装到停车位进行测试,共测试70车次,正确识别车位状态67次,识别率达到95%,且距离采集节点80 cm以外的车辆都不会对检测精度造成影响。测试结果显示,本系统采用二级基线跟踪算法能够快速对背景磁场进行基线跟踪,并且能过滤车辆在停入车位时对基线值的影响,大大提高了检测精度,能正确检测出车位上是否有车辆存在。为进一步提高车位判定的准确度,还需要通过大量的试验去完善。
5 结 语
车位检测准确率是实现智能停车场系统的基础。本文提出的基于GMR传感器的无线车位检查算法通过跟踪地磁场基线值,采用二级基线跟踪算法,能够很好地跟踪背景磁场的变化,滤除车辆驶入时对地磁场的扰动,算法简单易用,能够起到很好的效果。本文基于该算法的系统实现,具有低功耗、体积小、抗干扰能力强的特点,可广泛用于停车场管理、智能交通系统等方面。
参考文献
[1]鲍晓东,张仙妮.智能交通系统的现状及发展[J].道路交通与安全,2006,8(2):15-18.
[2]彭春华,刘建业,刘岳峰,等.车辆检测传感器综述[J].传感器与微系统,2007,26(6):4-7.
[3]赵亚妮,高辉.基于超声波的车辆检测器设计[J].计算机测量与控制, 2011, 19(10):2542-2544.
[4]宋颖华.交通检测技术及其发展[J].公路,2000(9):34-37.
[5]张永忠,张军强,李颖宏.多路环形线圈车辆检测器设计[J].电子技术应用, 2013, 39(11):23-26.
[6]尤三伟.高速公路常用车辆检测器的性能比较[J].甘肃科技, 2008, 24(1):83-85.
[7]邹初建,钱正洪,白茹,等.基于三轴GMR传感器的无线车位检测系统的研制[J].仪表技术与传感器,2014(9): 62-65.
[8]李云龙,张足生,马新军,等.基于AMR传感器的车辆检测算法[J].传感器与微系统,2013,31(9): 119-122.
[9]何志强,罗飞,于峰崎,等.基于地磁传感器的车辆检测算法[J].科学技术与工程,2014,14(15):203-206.
[10] Sifuentes E,Casas O,Pallas-Areny R.Wireless Magnetic Sensor Node for Vehicle Detection With Optical Wake-Up[J].Sensor Journal,IEEE,2011,11(8):1669-1676.
[11]钱正洪,白茹,黄春奎,等.先进磁电子材料和器件[J].仪表技术与传感器,2009(B11):96-101.
[12]朱红松,孙利民.无线传感器网络技术发展现状[J].中兴通讯技术,2009(5):1-5.
[13]卢全国,周敏,舒亮,等.轴向磁场分布对磁致伸缩驱动器磁滞特性的影响[J].磁性材料及器件, 2013(6): 5-9.
