WiFi视频传输机器人的设计
2016-05-31段英杰霍新宇王惠洁卢洪武
段英杰 霍新宇 王惠洁 卢洪武
摘 要:在矿井、火灾、震灾反恐等特殊环境下,人类一般无法第一时间到达现场,研制一款机器人代替人类探测并将图像、视频信息快速回传意义重大。WiFi是一种无线局域网联网技术,凭借组网方便、易于扩展等特点,有着广泛的应用前景。文中将二者结合,设计了以WiFi为数据传输载体,实现实时视频传输及控制的机器人系统。
关键词:WiFi;机器人;传感器;无线数据传输
中图分类号:TP242 文献标识码:A 文章编号:2095-1302(2016)05-00-02
0 引 言
在安防现场、矿井勘测、应急救援等特殊环境中,需要将现场检测到的图像信息及时传递至监控指挥中心,由于大部分视频监控设备移动性差以及部分监控现场存在风险性等原因,致使很多情况下实时移动监控难以实现[1]。本文将Android开发与OpenWrt系统开发相结合,设计基于WiFi的智能视频监控遥控机器人,可通过手机实时收看现场图像并发送控制指令,遥控机器人的运动,第一时间掌握所需要的全部视频图像信息,并可现场录像随时拍照[2]。
1 系统总体设计
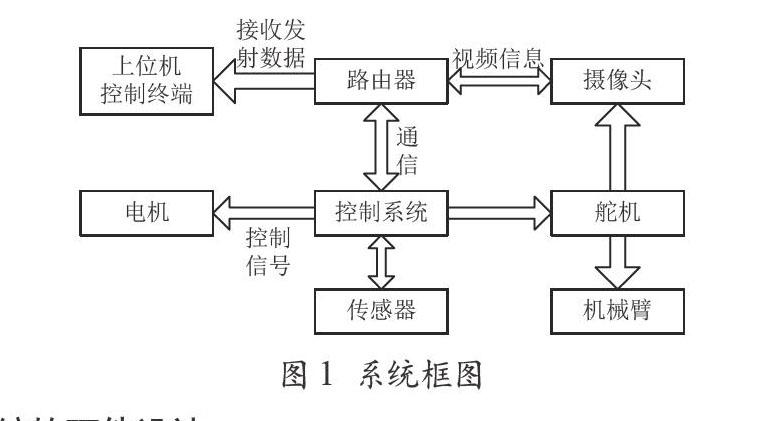
WiFi视频回传机器人由履带车体、无线路由器、摄像头及云台、核心控制板、机械臂及上下位机控制软件等构成[3]。总体设计思想是把无线路由器通过刷入开源的Openwrt系统,使之成为一个运行于Linux系统的小电脑,利用WiFi的高速无线通信能力将符合H.264标准的图像压缩信号回传到手机或电脑上位机上显示,并通过上位机发送控制指令,遥控机器人的运动。系统框图如图1所示。
图1 系统框图
2 系统的硬件设计
系统硬件由车体部分、路由器、摄像头及云台、核心控制板、机械臂等构成,其中核心控制板主控芯片采用MSP430F149,MSP430系列单片机是16位的RISC架构单片机,125 ns指令周期,相较于传统的51单片机,数据吞吐量更大[4]。MSP430系列单片机拥有丰富的外设和接口,USART串行接口能够完成与WiFi模块的通信,16位定时器具有捕获/比较功能,方便产生多路舵机控制信号和带死区控制的PWM电机调速信号[5]。电路部分主要包括电源模块、电机驱动、舵机驱动、下载串口、单片机电路、红外壁障、车灯控制以及数据通信接口等,将电机驱动、稳压、红外等集成到一起,减少PCB面积,降低成本。
2.1 车体部分
WiFi机器人以坦克模型作为底盘,采用履带式,此方式抓地能力强,可以轻松越过矮小障碍,并且具有速度快、噪音低等优点。我们在机器人上安装了4自由度机械臂,可以前后左右上下六个方向完成各种复杂动作,排除前进障碍。车身装配2个12 V/120转直流电机,电池组电源12 V,可多个并联使用,为机器人提供持久动力。
2.2 摄像头及云台
自由度摄像头云台水平旋转角度为±85度,俯仰旋转角度为-10度~+75度。摄像头采用30万像素的高速工业摄像头模块,适合动态拍摄,其接口采用USB通信协议,回传的视频图像清晰,满足设计需要。云台由2个MG995数字舵机及其他辅助材料构成,下位机接收到控制命令,控制这两个舵机完成摄像头上下左右四个方向的转动,扩大视野范围。
2.3 WiFi(路由)模块
WiFi模块采用搭载高通AR9331芯片的普通无线路由器刷入开源的Openwrt系统,成为一个运行Linux系统的小电脑,主要实现视频采集、数据传输、转发等功能。该模块符合国际标准的802.11 b/g/n协议,采用DSSS、OFDM、BPSK、QPSK、CCK和QAM基带调制技术,能自适应路由器等设备的无线热点,最大连接速率可达150 Mb/s。天线将传输线上传播的导行波变换为在自由空间中传输的电磁波(发射)以及相反变换(接收)[6]。
2.4 电机、舵机驱动模块
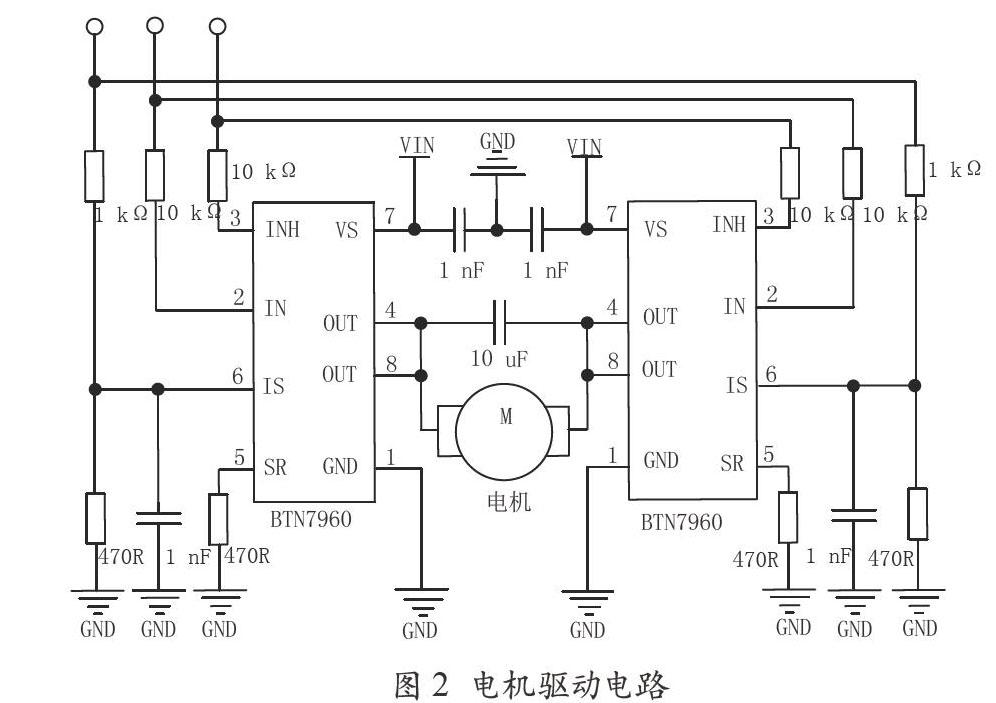
电机驱动模块采用BTN7960B,它是一个完全集成的高电流半桥,因此采用两片构成全桥实现电机的正反转。BTN7960B提供了一个保护高电流PWM电机驱动器的成本优化解决方案,并且占用非常小的电路板空间。电源开关采用垂直MOS技术,确保最佳状态阻力。图2所示为BTN7960B与单片机组成的H电机驱动单元。
图2 电机驱动电路
机械臂部位安装MG995舵机,其内部使用空心杯电机,金属齿轮,双滚珠轴承,最大扭矩为13 kg,能够满足机械臂的要求。舵机驱动电路使用LM2596ADJ开关型稳压芯片,能够稳定输出3 A的负载电流,其输出电压可调到6 V左右,最大不能超过6.5 V。该器件集成频率补偿和固定频率发生器,允许我们使用更小尺寸的滤波器件,极大地简化了电源电路设计[7]。同时,3 A的大电流能够满足多个舵机同时工作的电流需求,减少舵机间的电源干扰。在电路设计中,我们还使用了多个滤波电容,在输入端增加了滤波电感,进一步提高电源的稳定性。云台舵机选用辉盛SG90舵机,响应快,其重量仅为9 g,适合云台使用。
3 系统的软件设计
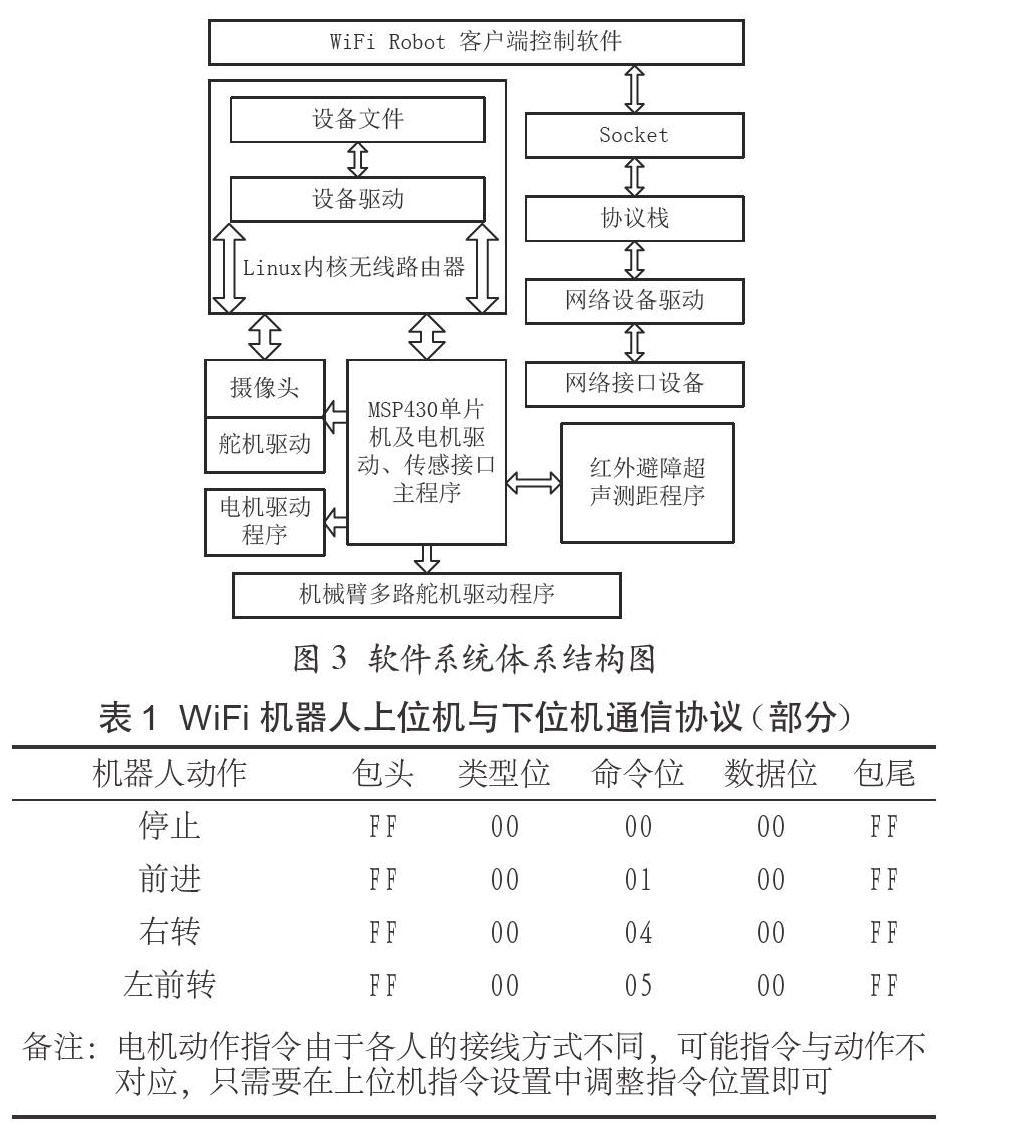
软件部分是机器人智能化的体现,它控制机器人所有的运行状态,主要包括主程序设计、运动控制软件设计、无线WiFi路由器的刷机改造、无线WiFi路由器与单片机通信协议及软件设计、基于安卓的智能手机客户端控制软件设计等[8]。软件系统体系结构如图3所示。
3.1 通信协议
通信协议是连接上位机与下位机的纽带,由于单字符通信方式干扰较大,故采用数据包格式传送指令,包头用OXFF,包尾用OXFF,无校验位。部分协议规定如表1所列。
3.2 上位机
上位机是发送指令的部分,它向路由器发送视频请求,路由端的视频处理程序会把获取的USB摄像头视频传回上位机进行解码并显示。
备注:电机动作指令由于各人的接线方式不同,可能指令与动作不对应,只需要在上位机指令设置中调整指令位置即可
上位机的编写通过TCP/UDP等通信方式,用Socket连接把数据发送到路由端[8],本设计采用Client模式,路由端是服务器模式,无需转发操作,直接连接WiFi机器人即可操控。客户端软件是基于安卓系统的App,通过修改网络开源码的通信协议部分代码重新编译开发而成,再整合安卓App和底层驱动程序构建机器人软件控制系统,实现对整个机器人的实时控制[9]。上位机界面如图4所示。
图4 操作终端
3.3 下位机
跑在单片机系统的程序称为下位机,在Keil5用C语言编写下位机程序,包括初始化、外部中断、定时器中断、串口中断、PWM中断、AD中断等[10],其作用是接收来自上位机的数据,并根据通信协议解码分析,判断上位机发出的是何种动作,再为单片机芯片指定引脚赋高低电平,从而实现控制舵机使摄像头云台旋转及机械手臂转动、电机转向、红外壁障、车灯控制、拍照等功能。
4 结 语
本文对基于安卓App遥控,以WiFi为视频传输媒介的机器人的结构设计及工作原理进行了阐述,经过实际调试运行,WiFi Robot的实际控制距离能达到10 m。WiFi机器人具有实时视频传输、人工自主控制、红外壁障等功能,而且采用WiFi自发射直接和手机通信,无需依赖公共通信网,特别适合无网络覆盖的灾难救援现场及偏远地区的反恐侦察使用。
参考文献
[1]王宇阳,杨奕,韩志.基于Android设备的WiFi智能监控机器人设计[J].计算机与数字工程,2014,42(12):2410-2414.
[2]刘启彬.煤矿救援机器人软件系统研究[D].西安:西安科技大学,2009.
[3]张学武,何玉钧.基于WiFi的远程视频传输智能机器人设计[J].电子科技,2013,26(2):4-7.
[4]沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008.
[5]李自珍,郭宝安.MSP430系统应用结构设计与选型[J].单片机与嵌人式系统应用,2007,7(7):11-13.
[6]李杨.WiFi技术原理及应用研究[J].科技信息,2010(6):241.
[7]邱关源,罗先觉.电路(第五版)[M].北京:高等教育出版社,2006.
[8]曾彦淞,王忠民,王晨.基于WiFi的移动机器人视频监控系统[J].西安邮电学院学报,2012,17(4):87-91.
[9]摆云.基于Android开放平台和无线通信网络的实时音视频传输系统设计与实现[D].兰州:兰州大学,2012.
[10]郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2009.
