高精度磁罗经传感器设计
2016-05-31付士民孙立凯于建楠
付士民, 孙立凯, 于建楠, 齐 娜
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
高精度磁罗经传感器设计
付士民, 孙立凯, 于建楠, 齐娜
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
摘要:设计了一种基于磁感效应的磁罗经传感器,该传感器采用了纳米坡莫合金材料模压形成单轴向磁芯,并在磁芯上采用密绕法缠绕漆包线形成磁感应传感器。磁感应传感器通过LR谐振施密特触发器电路处理,将磁场强度信号转换为频率信号。通过基于现场可编程门阵列(FPGA)的高精度频率计提取磁罗经频率信号。磁罗经传感器采用四点修正法来补偿背景磁干扰信号,同时采用数字信号处理器(DSP)采集三维加速度传感器信号进行智能姿态自补偿,使传感器具有较好的环境适应能力。经测试,该罗经具有精度高,稳定性高,功耗低,体积小,且具备智能自补偿功能等特点。
关键词:磁感效应; 磁罗经; 姿态补偿; LR谐振施密特触发器电路
0引言
智能磁罗经传感器是一种利用地球磁场测量方向的重要导航装置,能实时提供机动目标的航向和姿态,广泛地应用在航空、航海、车载定位、深海探测等领域。随着微电子学与通信技术的发展,将磁罗经传感器与三轴加速度倾角传感器相结合,并采用数字信号处理器(DSP)来补偿磁传感器的倾角误差,以数字量形式给出准确的地理航向角,使得磁罗经传感器具备智能自动校准功能[1]。
地球磁场强度大约为0.5~0.6 Gs,与地球表面平行的分量总是指向磁北极。目前的电子磁罗经按设计原理分为三种:磁通门式,磁阻效应式和磁感效应式。为了达到较高的灵敏度,磁通门式磁罗经传感器必须增加线圈横截面积,所以,传感器通常存在体积大、功耗大、处理电路相对复杂、成本高等问题。磁阻效应式磁罗经具有结构简单、灵敏度高、线性度好等特点,但是其灵敏度、线性度与量程相互制约,存在交流零位信号,不宜高频动态测量[2]。磁感效应式传感器是一种新型器件,采用磁感效应原理,能够满足高频动态测量,因其输出信号为频率信号,易于数字信号处理,具有成本低、抗干扰能力强、精度高以及可靠性好等特点[3]。
本文设计了一种基于磁感效应的磁罗经传感器,该传感器采用了纳米坡莫合金材料模压形成单轴向磁芯,并在磁芯上采用密绕法缠绕漆包线形成磁感应传感器。磁罗经传感器基于DSP采用四点修正法来补偿背景磁干扰信号,采集三维加速度传感器信号进行智能姿态自补偿技术,使磁罗经传感器具有较好的环境适应能力。
1磁罗经传感器结构与原理
磁感应传感器运用线圈磁感效应来检测地磁场。传感器结构如图1所示,用坡莫合金材料模压单轴磁芯,并采用密绕法在轴向磁芯上缠绕0.01 mm漆包线形成感应线圈,每个轴的电感值在500 μH左右,根据需要得到的电感进行匝数、铜线、磁芯材料的选取。根据线圈电感量计算公式
(1)
其中,L为线圈电感量 ,D为线圈直径,N为线圈匝数,l为匝线圈长度,k为坡莫合金磁导率系数[4]。
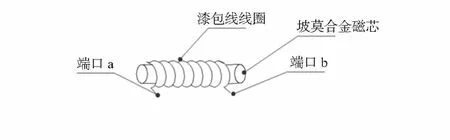
图1 磁罗经传感器结构示意图Fig 1 Structure diagram of magnetic compass sensor
磁感应传感器的磁感效应原理是运用纳米坡莫合金和漆包线制作特制电感,在外磁场和线圈电流的影响下,电感的磁性材料会有磁化效应,当趋于磁饱和时,磁导率μ和磁场强度H呈反比。铁芯被磁化时,会满足趋于磁饱和条件电感L和导磁率μ呈正比,所以,通过测量因磁场变化而引起电感变化来衡量地磁场强度。采用正、反向LR谐振激励时,在有无外磁场HE影响下,磁导率μ和磁场强度H会发生平移,导致解调电路输出信号正向激励输出信号周期τp和反向激励输出信号周期τn不相等,出现时差,这个时差与所测磁强度呈正比,因此,通过检测时差就可以检测对应地磁场强度变化[5]。
2智能磁罗经传感器关键技术
2.1总体方案设计
如图2所示,智能磁罗经传感器包括:磁传感器激励,解调电路,三维磁感应式传感器,三维加速度传感器,基于现场可编程门阵列(FPGA)的同步A/D转换电路,基于FPGA的高精度频率计电路,基于DSP的倾角与磁场数据融合算法处理电路以及RS—485数字通信接口。
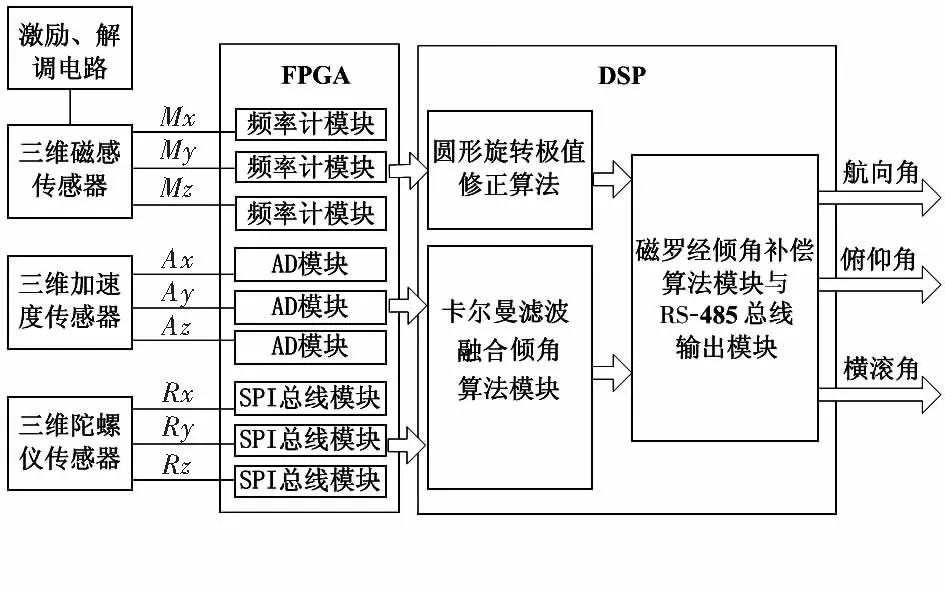
图2 总体方案设计示意图Fig 2 Diagram of overall scheme design
其中,激励、解调电路采用LR施密特触发器电路设计,正、反向驱动激励选择电路采用模拟开关来设计。FPGA采用Altera公司的EP2C8T144C8N芯片。DSP采用TI公司的TMS320F28335芯片,该芯片资源丰富,支持32位浮点运算,主频150 MHz,片上FLASH:256 k×16位,具有SPI,I2C,PWM等接口模块,满足设计的使用要求。三维加速度传感器采用KXR94—2050传感器,其三路模拟信号输出,量程为±2gn,非线性为0.1 %FS。AD芯片采用MAX313,具有16位精度,最高转换速度最快为200 ksps。
智能磁罗经传感器的倾角修正电路采用基于FPGA的同步解调方法实现实时同步采集倾角信号。本设计利用FPGA的并行处理信号能力,采集加速度传感器信号,消除时差影响,最终采用卡尔曼滤波技术融合算法,解算补偿磁传感器倾角误差。
本文采用四点法补偿算法来修正磁罗经所处环境背景中的软磁和硬磁干扰。利用DSP采集三维磁感应式传感器测量的地磁场X,Y轴分量,并经过数字补偿运算对其进行自动修正,最终消除背景磁干扰。
2.2硬件电路设计
2.2.1磁感传感器激励与解调电路设计
本文采用LR施密特触发器电路来激励磁感传感器,并采用模拟开关来控制电路的正、反向激励[6]。
LR施密特触发器电路,如图3所示,由74lS14芯片与电阻器组成。

图3 LR施密特触发器电路Fig 3 LR Schmitt trigger circuit
正、反向激励选择电路采用模拟开关MAX313芯片设计,通过控制IN1,IN2,IN3,IN4来实现磁感传感器的激励方向,如图4所示。
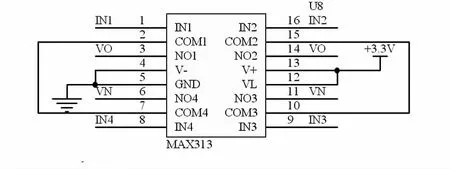
图4 MAX313模拟开关激励方向选择控制电路Fig 4 MAX313 analog switch excitition direction selection control circuit
2.2.2磁感传感器三维加速度电路设计
三维加速度传感器电路采用KXR94—2050集成芯片设计,如图5所示,其只需简单的外围电路设计就可以获得三轴加速度信号值。
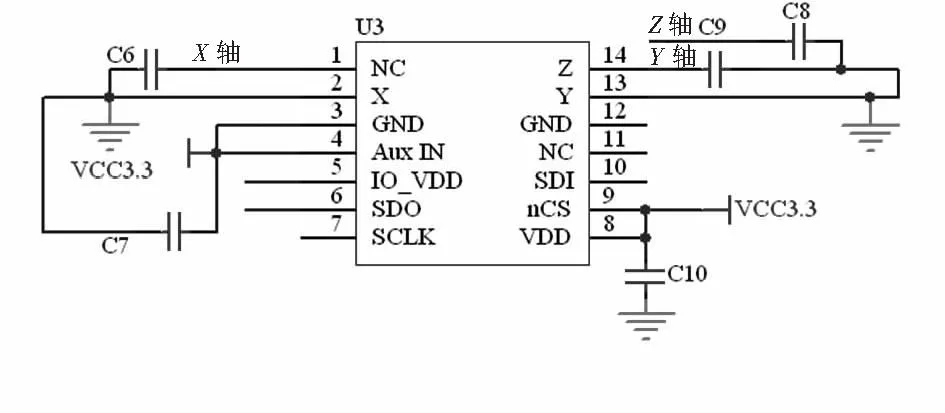
图5 三维加速度电路设计Fig 5 Design of 3D acceleration circuit
2.3补偿算法设计
2.3.1四点磁罗经补偿算法设计
本文设计的罗经补偿算法基于傅里叶序列模型的补偿算法,由所处环境场提供基准航向值,补偿算法根据基准值来计算,补偿磁罗经误差,模型可以表达为
Δφ=a+bsinφ+ccosφ+dsin 2φ+ecos 2φ.
(2)
其中,Δφ为磁罗经误差;a,b,c,d,e为补偿算法的补偿参数;φ为补偿之前的磁罗经角度。
算法中取傅里叶模型表达式2阶的四点补偿,此时表达式中d,e为0,所以,只需求出a,b,c,则完成磁罗经算法设计[7]。
算法标定过程:将磁罗经传感器置于水平转台,水平转动1圈,利用水平转台标定四点方位:0°,90°,180 °,270°。从磁罗经传感器得到四基准点的航向角度,求出所得测量航向角与基准值的误差,分别记为Δφ1,Δφ2,Δφ3,Δφ4,则利用最小二乘法可求得

(3)
(4)
(5)
将a,b,c代入到式(2)中,则可以求出Δφ,从而实现了对磁罗经的误差补偿算法设计,去除了背景磁干扰[8]。
2.3.2倾角补偿算法设计


(6)
(7)

(8)
3实验测试
本文将磁罗经传感器置于水平转台,水平转动1圈,利用四点磁罗经补偿修正法来去除背景磁干扰,如图6所示,修正前由于背景磁干扰,磁罗经传感器出现偏心,椭圆变形等误差,修正后圆心恢复到原点,而且,椭圆波形失真得到修复,从实验中可以看出,补偿算法可以有效地补偿磁罗经误差。
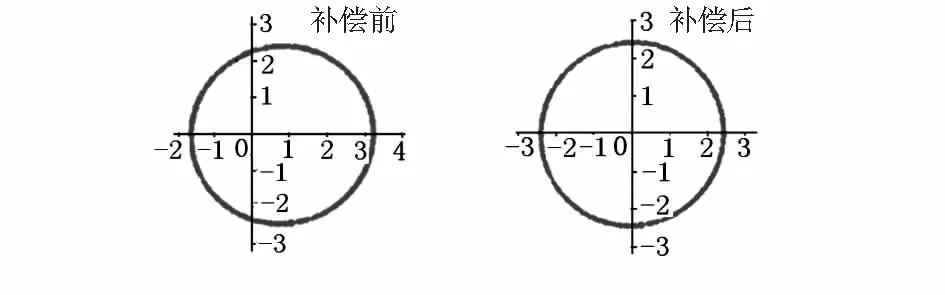
图6 四点磁罗经修正算法结果示意图Fig 6 Diagram of 4 point magnetic compass correctionalgorithm result
磁罗经传感器在倾角小于5°,测试环境温度为25 ℃环境下,传感器测量误差如表1所示,在0~360°平均取12点,测量磁罗经航向角度值,经测试,航向角度误差小于0.8°。
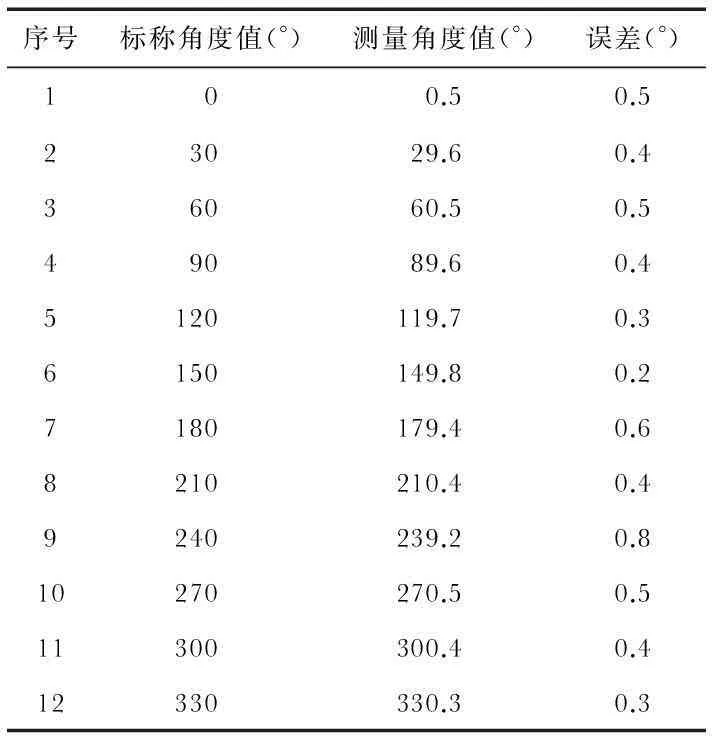
表1 磁罗经传感器误差测试数据
4结论
本文设计的磁罗经传感器采用坡莫合金和漆包线制作特制电感来测量地磁场强度。采用三维加速度传感器融合算法补偿磁罗经传感器倾角误差。背景磁干扰智能补偿方法采用四点磁罗经补偿算法设计来补偿传感器所处环境中软、硬磁对其的干扰,该方法简便、实用。经实验验证:传感器在倾角小于5°条件下,磁航向角度误差小于0.8°。该磁罗经传感器具有精度高、稳定性高、功耗低、体积小,且具备智能自补偿功能等特点,具有很好的推广和应用前景。
参考文献:
[1]郜莉.三维磁阻式电子罗盘的设计与实现[D].哈尔滨:哈尔滨工程大学,2009.
[2]吉训生,王寿荣.自适应Kalman滤波在MEMS陀螺仪信号处理中的信用[J].传感器与微系统,2006,25(9):79-85.
[3]张建海,柴小丽.基于磁感传感器SEN—S的电子指南针系统[J].传感器与仪器仪表,2009,25(5-1):160-162.
[4]熊剑,刘建业.数字磁罗盘的研制[J].传感器与微系统,2004,23(8):46-51.
[5]赵翔,杜普选.基于MEMS加速度计和陀螺仪的姿态检测系统[J].铁路计算机应用,2012,21(3):15-17.
[6]康国华.GPS/SST/SINS组合导航系统研究[J].应用科学学报,2006(5):293-297.
[7]李伟,童卫平.一种无需轴对准的磁罗盘正交度测试方法[J].宇航计测技术,2013,33(1):62-65.
[8]刘军,何国国,岳兴连,等.基于IMEMS传感器的汽车运动姿态测量系统研究[J].传感器与微系统,2009,28(1):12-15.
付士民(1984-),男,黑龙江绥化人,硕士,主要研究方向为物理传感器设计与研究。
Design of high precision magnetic compass sensor
FU Shi-min, SUN Li-kai, YU Jian-nan, QI Na
(The 49th Research Institute of China Electronics Technology Group Corporation,Harbin 150001,China)
Abstract:Design a magnetic compass sensor based on magnetic induction effect,the single axial core sensor is formed by nano Pomo alloy material molding,and it is produced on magnetic core,which is wound with the wire winding.The magnetic induction sensor is processed by LR resonant Schmidt trigger circuit,and magnetic field intensity signal is converted to frequency signal.Adopt high precision frequency meter based on FPGA to extract magnetic compass frequency signal.Magnetic compass sensor uses four points correction method to compensate background magnetic interference signal,at the same time,DSP is used to capture signal of 3D acceleration sensor in order to carry out intelligent attitude self-compensation,which makes the sensor have good environment adaptability.The results show that the sensor has advantages of high precision,high stability,low power consumption,small size and has intelligent self-compensation function.
Key words:magnetic induction effect; magnetic compass; attitude compensation; LR resonant Schmidt trigger circuit
作者简介:
中图分类号:TN 23
文献标识码:A
文章编号:1000—9787(2016)01—0104—03
收稿日期:2015—10—16
DOI:10.13873/J.1000—9787(2016)01—0104—03
