一种姿态数据采集处理及通信方法研究
2016-05-30李经玮张书会刘佳梅卢星
李经玮 张书会 刘佳梅 卢星


摘 要:仿真蛇外形灵巧,行动隐蔽,可以秘密潜入机要场所完成军事侦察工作。姿态采集系统可以通过采集仿真蛇姿态实现运动控制。为解决现有姿态采集设备庞大复杂和成本高昂的问题,研究一种新型基于MEMS惯性传感器的姿态数据采集系统采集仿真蛇体各部位姿态,阐述了系统内部数据通信与系统网络时间同步的方式,分析了传感器数据平滑的方法,最后对姿态采集系统的优势与用途进行了总结与展望。
关键词:惯性传感器;时间同步机制;数据平滑
仿生蛇类似生物蛇运动灵巧、机敏,可以像蛇一样攀爬、缠绕在杆、柱上,也可以在狭缝等微小地带行进,探听、窃取敌方机要场所中的有利情报。控制仿生蛇复杂灵活的运动需要对其各部位姿态进行精准采集捕获,这就需要通一种装置再现其运动中的姿态。
目前市场上已有了成熟的机械式姿态采集系统和光学式姿态采集系统[ 1 ]。机械式姿态采集系统由多个刚性连杆和一些关节组成,安装在仿生蛇上由蛇体各部件驱动动作,来采集运动姿态[ 2 ] [ 3 ]。但是该装置复杂笨重,不可能使生物蛇灵巧运动。光学式姿态采集系统由佩戴的反光标记点和多架相机组成,相机通过跟踪拍摄各标记点的位置来确定运动姿态。这种系统虽然采集精度较高,但做动作时各标记点之间容易互相遮挡,且设备价格昂贵。针对已有姿态采集装置中存在问题,提出一种可靠性强、精确性高、低功耗的惯性姿态采集系统。
1 系统介绍
基于惯性传感器的姿态采集系统由若干采集节点和一个汇聚节点组成,它们分别被绑在仿真蛇的各个部位,之间通过总线两两连接。采集节点的功能是采集该部位的姿态并将数据发送至汇聚节点,汇聚节点功能为接受各节点姿态数据,通过分析实现仿真蛇的运动控制。
系统的网络通信协议为CAN总线协议。数据通过协议以CAN总线数据帧的格式完成在各个节点间的传递,它们之间的拓扑结构为总线结构,所有采集节点将其所在部位的姿态数据直接发送至汇聚节点,如图1所示。
各节点由硬件模块与软件模块组成。硬件模块包括微控制器,惯性传感器,以及数据传输的接收与发送装置,如图2所示;软件处理部分包括传感器数据的误差标定、平滑与滤波、数据的融合与姿态的解算以及数据的接收和发送等。本文只介绍系统的网络构成和单个节点数据的平滑与滤波,系统其它部分另外行文介绍。
采集节点中的惯性传感器采用Invensense公司生产的6轴MEMS传感器MPU6050。其集成了3轴陀螺仪、3轴加速度计,降低了以分立元件进行组合的方式造成的数据误差,提高了数据精度,同时降低了MCU的功耗。
2 网络协议
各采集节点与汇聚节点以总线拓扑的方式通过CAN总线连接,CAN总线协议采用基于消息的时间触发机制同步系统时间,将采集的姿态数据在固定的时间窗传输。
时间触发机制的基础是汇聚节点和所有采集节点的时间同步。它的实现方式是时间主节点启动定时器后广播周期性的同步消息帧,其他节点通过收到的同步消息帧来校正自己的时间,从而实现全局的时间同步。同步消息帧以标准CAN数据帧为帧格式,由标识符标识其特征。
设发送同步消息帧所需的时间为ts。基本周期还包括时间窗和时间间隔?驻t。时间窗包括专用窗口ti和自由窗口tf,专用窗口用于传输采集节点的角度数据,其长度是固定的,为传输一帧CAN数据帧所需要的时间。
3 惯性传感数据预处理
3.1加速度数据预处理
通常情况下,传感节点安装在仿真蛇体上,加速度传感器的输出信号除了包含运动加速度分量和重力加速度分量以外,还包括系统测量噪声[ 4 ],且噪声主要为高频信号。为了减少信号的干扰噪声,须对信号进行滤波。本文对加速度信号用中值滤波器滤除数据中的噪声。
设滤波器窗口A的长度n=2k+1(奇数)或n=2k(偶数), 观测值个数Nn,即x1,x2,...,xn。当窗口A在原始序列上移动时,中值滤波器输出med(xi)为:
其中x (k)表示窗口内2k+l (或2k) 个原始值中第k个最大或最小的数值,即将任一时刻窗口内的观测数据重新按照数值大小排序,然后取中间的数据作为本次滤波器的输出。
根据上述定义,窗口n=2k+1的一维中值滤波器的输入xi与输出yi关系为
图4为加速度计原始信号和经中值滤波器滤除噪声后的加速度计信号对照图。从图中可以看出,通过低通滤波器去噪后,高频噪声可以有效地被消除。
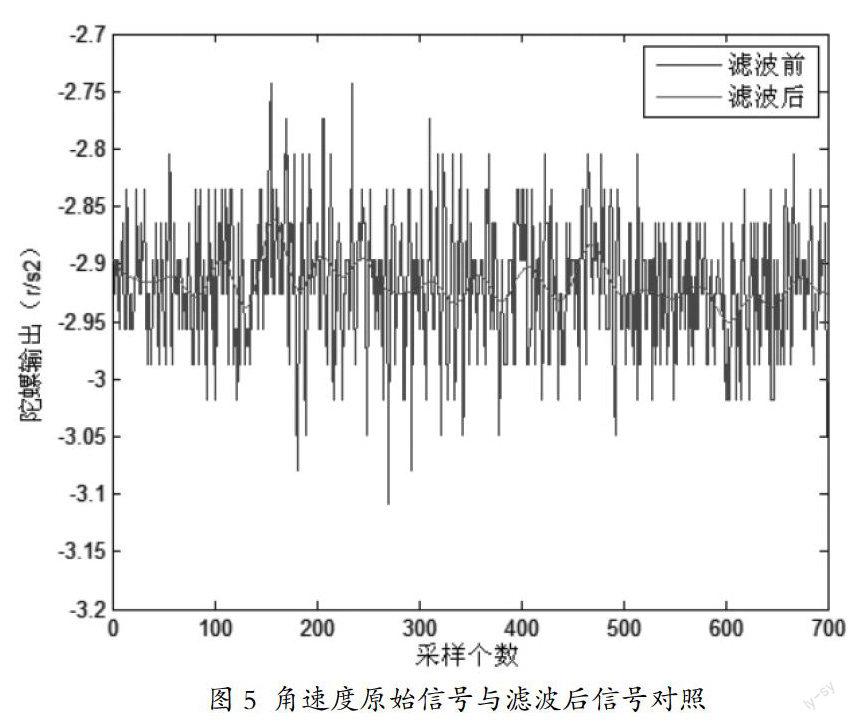
3.2 陀螺仪数据分析与预处理
陀螺仪采集到的角速度数据存在漂移。IIR数字滤波器去噪过程中运算次数较少,因此适用于实时系统。本文选择3阶Butterworth低通数字滤波器滤掉系统中的系统性漂移。
IIR Butterworth数字滤波器的设计步骤是:
2)依照模拟滤波器的技术指标设计G(s);
3)最后通过Z变换将G(s)变换为H(z)。
图5为陀螺仪原始信号和经低通滤波器后的信号。从图中可以看出,通过低通滤波器去噪后噪声可以有效地被消除。
4 結论
本文主要设计了一套用于采集仿真蛇各部件姿态的采集系统,系统中分为两种节点:采集节点和汇聚节点。采集节点采集加速度数据和角速度数据,之后对实时采集的数据进行滤波处理,解算为姿态角后打包,通过CAN总线发送至汇聚节点。由汇聚节点完成后续的运动控制。
本系统结构小巧轻便,姿态采集范围大,能够较为精准地采集仿真蛇运动中身体各部件的姿态。同时,系统各个节点都由电子元件组成,价格便宜。该系统为仿真蛇可靠的运动控制提供了有力保证。
参考文献:
[1] 霍长娟.基于视频的人体运动姿态分析与重建[D].天津:天津理工大学,2008.
[2] 赵杰.动态捕捉五大技术种类及光学式运动捕捉数据的实用技巧(上)[J].电视字幕(特技与动画),2009,v.1502:30-32.
[3] 刘博.基于MEMS传感器的动作捕捉系统开发设计[D].北京理工大学,2011.
[4] 戴欢.基于惯性动作捕捉的人体运动姿态研究[D].石家庄铁道大学,2012.
[5] 盛治进,朱满芬. 惯性陀螺方法与基于标志点虚拟陀螺方法在网球发球中上臂转速测量上的应用[J].天津体育学院学报,2012,01:78-83.
[6] 周冬鑫.惯性运动捕捉前端设备研究与设计[D].浙江大学,2011.
