星敏感器电控系统设计
2016-05-30周厚元
周厚元
摘 要:星敏感器是最常用的姿态确定仪器之一,论文根据星敏感器工作原理,在星敏感器总体设计方案的基础上,设计了星敏感器电控系统的有源像素传感器及智能控制器单元、数据处理单元和数据通信单元。该电控系统功能完备,能够满足星敏感器系统的控制要求。
关键词:星敏感器 电控系统 硬件设计
中图分类号:TP273 文献标识码:B 文章编号:1674-098X(2016)06(b)-0066-02
星敏感器是一种高精度的姿态敏感器。它以恒星为参照系,通过探测天球上的恒星并进行解算,为航空航天飞行器提供准确的空间方位和基准[1]。相对于惯性陀螺、地球敏感器、太阳敏感器等其他姿态敏感器,星敏感器具有指向精度高、无姿态累积误差、完全自主导航能力、隐蔽性好等特点[2],已成为空间飞行器首选的姿态敏感器。星敏感器可用于多种平台,如海基平台、陆基平台、机载平台、弹载平台和天基平台等[3]。
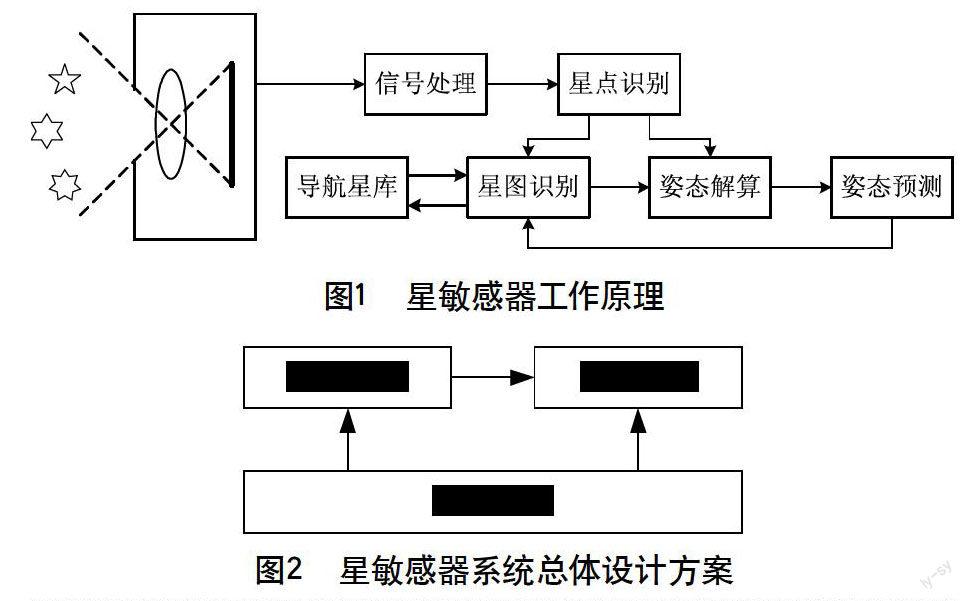
1 星敏感器工作原理
星敏感器工作原理如图1所示。当星敏感器对星空成像时,视场内的所有恒星便会经由光学镜头成像在图像传感器的感光面上,同时完成星像由光到电荷的转换,由支持电路读出所转换的电荷图像,并将其放大为电压模拟信号,通过片上A/D转换之后输出数字信号,并且与图像传感器的像元一一对应地存储到星图存储器中,随后,数据处理系统会扫描星图的所有像元,从中识别出恒星,计算出观测到的恒星能量和在像面像元坐标系的位置。之后,提取星图中恒星的几何特征模式,同导航星库中的导航模式进行匹配,如果观测星模式与导航星模式匹配成功,就可以利用姿态解算方法来确定星敏感器的光轴在惯性空间中的指向[4]。
2 星敏感器系统总体方案
星敏感器系统主要由3部分组成:电控系统、光学系统和结构本体组成,如图2所示。光学系统由遮光罩、光学镜头及临时连接筒组成,遮光罩用于减小杂散光的干扰,光学镜头收集指定导航星发出的可见光,并将其成像在光学系统的焦平面上。电控系统将星空经光学系统所成的像进行光电转换并空间离散采样,转换成相应的数字星图,并提取各星点目标的精确质心位置。结构本体将光学系统和电控系统有机地结合在一起。
3 星敏感器电控系统设计方案
星敏感器电控系统的设计方案如图3所示。系统主要由有源像素传感器及智能控制器单元、数据处理单元和数据通信单元组成。有源像素传感器及智能控制器单元主要负责接收数据处理单元的控制指令,产生有源像素传感器图像传感器和A/D转换所需的驱动信号,将星空经光学系统所成的像进行光电转换并空间离散采样,并完成数字星图的读出和存储[5]。数据处理单元主要负责通过数据通信单元的1553B控制器接收来自载体控制器的指令,控制有源像素传感器及智能控制器单元的工作,处理所拍摄的星图,计算出星点的质心位置并回传至载体控制器,所拍摄的星图可通过数据通信单元的遥测控制器发送到载体遥测系统。数据通信单元主要负责与载体控制器和载体遥测系统通信,具体分别由1553B控制器和遥测控制器来实现。
3.1 有源像素传感器及智能控制器单元
有源像素传感器及智能控制器单元是星敏感器电控系统设计的基础和关键。它要负责接收数据处理单元的控制指令,产生图像传感器和A/D转换所需的驱动信号,将星空经光学系统所成的像光电转换后空间离散采样,并完成数字星图的读出和存储。
3.2 有源像素传感器
有源像素传感器是星敏感器电控系统的核心部件。其功能是在微处理器的控制下,将导航星在其感光面上所成的图像转化为电信号,供随后的数据处理单元使用。由于导航星的亮度差别较大,光谱特性不尽相同,因此,星敏感器要求图像传感器具有较宽的光谱响应范围、较高的灵敏度和较大的动态范围。论文选用美国赛普拉斯半导体公司为空间应用研发的图像传感器STAR1000,利用可编程逻辑阵列实现对其驱动控制,具有抗干扰能力和抗辐射能力强、可靠性高、特别适合应用于复杂的太空环境等特点。
3.3 智能控制器的设计
为实现驱动STAR1000,设计的智能控制器功能有:(1)上位机可查询和设置窗口大小、曝光时间;(2)可接收上位机的有效指令,产生STAR1000所需的驱动时序信号,实现图像的A/D转换;(3)图像A/D转换后,自动将数据存放到静态存储器中;(4)数据存储后,自动向上位机发出中断信号,并将该静态存储器的控制权交回上位机,并将另一个静态存储器的控制权交给该智能控制器,实现乒乓存储;(5)可查询该智能控制器的状态。智能控制器设计完成后,即可驱动控制图像传感器,将数据存储到2片静态存储器中,实现乒乓缓存,且能够实现与数据处理单元的接口。
3.4 数据处理单元
数据处理单元是星敏感器电控系统的核心处理单元。它主要负责通过数据通信单元的1553B控制器接收来自载体控制器的指令,控制有源像素传感器及智能控制器单元的工作,处理所拍摄的星图,计算各星点目标的质心位置并回传至载体控制器,所拍摄的星图通过数据通信单元的遥测控制器发送到载体遥测系统。
3.5 数据通信单元
数据通信单元是星敏感器电控系统的外部接口。它主要负责与载体控制器和载体遥测系统通信,具体分别由1553B控制器和遥测控制器来实现。与载体控制器的通信采用1553B总线,遥测数据采用RS232协议形式进行通信。
4 结语
相对于太阳敏感器、磁强计、地平仪和陀螺仪等其他常见的姿态测量设备,星敏感器姿态测量精度比较高,能够实现自主导航能力,抗干扰能力强。文章设计了一种基于FPGA的智能有源图像控制器和基于ARM的数据处理单元。该电控系统能够实现对目标图像的捕获,以及数字图像数据的输出和存储,与载体控制器和遥测部分通信可靠,并且具有小型化和轻量化特点。
参考文献
[1] 刘垒,张路,郑辛,等.星敏感器技术研究现状及发展趋势[J].红外与激光工程,2007(36):529-533.
[2] 谭汉清,刘垒.惯性/星光组合导航技术综述[J].飞航导弹,2008(5):44-51.
[3] 何炬.国外天文导航技术发展综述[J].舰船科学技术,2005,27(5):91-96.
[4] 刘朝山,刘光斌,王新国,等.弹载星敏感器原理及系统应用[M].北京:国防工业出版社,2010.
[5] 王洪涛,罗长洲,王渝,等.智能APS控制器的设计与实现[J].电光与控制,2009,16(3):58-82.
