基于MRAS的感应电机无速度传感器矢量控制系统研究
2016-05-30兰小川
兰小川
摘要:文章研究了基于定子电流的模型参考自适应系统(MRASCC)方法来观测感应电机的转速和磁链,解决了传统的以电压模型作为参考模型的模型参考自适应系统所存在的低速时不能正常工作的问题。该方法用感应电机自身作为参考模型,感应电机的定子模型和电流模型共同作为可调模型,利用Lyapunov稳定性定理推导转速自适应率保证系统的稳定性。
关键词:感应电机;矢量控制系统;无速度传感器;MRASCC;自适应系统 文献标识码:A
中图分类号:TM34 文章编号:1009-2374(2016)19-0007-02 DOI:10.13535/j.cnki.11-4406/n.2016.19.004
1 概述
无速度传感器矢量控制系统在过去十余年中已得到广泛应用,它的优点是:简化装置硬件的复杂性、降低造价、减小驱动电机尺寸、取消传感器电缆和提高可靠性。而由于模型参考自适应法原理简单、易于实现,在无速度传感器交流调速系统中得到广泛应用。但是目前在生产实际中所应用的模型参考自适应法,大多是以电压模型为参考模型,电压模型存在低速问题。基于定子电流的模型参考自适应法作为一种新型的方法,它以感应电机本身作为参考模型,解决了电压模型的电阻压降问题和纯积分运算存在的逸走问题,因此基于定子电流的模型参考自适应法在实际应用中具有很好的发展
前景。
2 感应电机数学模型
3 基于定子电流的模型参考自适应法
利用感应电机本身作为参考模型,电流模型和电机定子模型作为可调模型,Lyapunov稳定性定理建立自适应率。其原理如图1所示:
3.1 可调模型
用电动机定子模型SM(stator model)可以算出定子电流矢量的观测值:
电机额定参数:PN=35kW,UN=380V,RS=0.4Ω,Rr=0.5,Ls=0.087H,np=2,Lr=0.088H,Lm=0.085H,J=0.0876kg·m2,D=0.001kg·m2/s。
经调试,磁链调节器(AψR)的参数为Kp=150,KI=200;转矩调节器(ATR)参数为Kp=1.27,KI=250;转速调节器(ASR)参数为Kp=100,KI=1;自适应调节器(AAR)的参数为Kp=1000,KI=2.5。
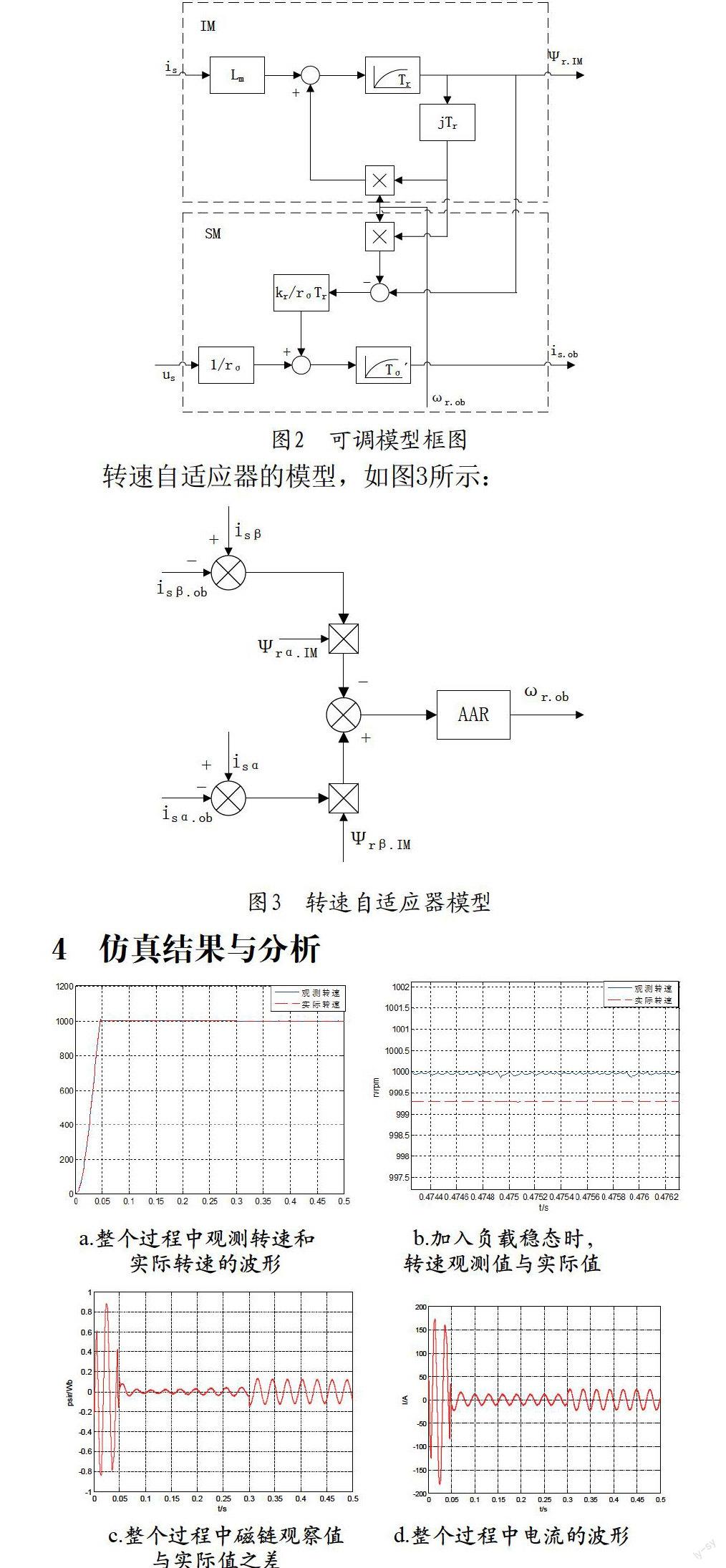
4.1 在高速时的仿真
给定转速为1000rpm,其仿真波形如图4所示。
波形分析:在整个过程中,转速的观测值和实际值的波形基本上重合;加入负载稳态时,转速观测值为1000rpm,转速实际值为999.3rpm,相差0.7rpm;磁链观测值与实际值之差很小;电流波形为标准的正弦波。
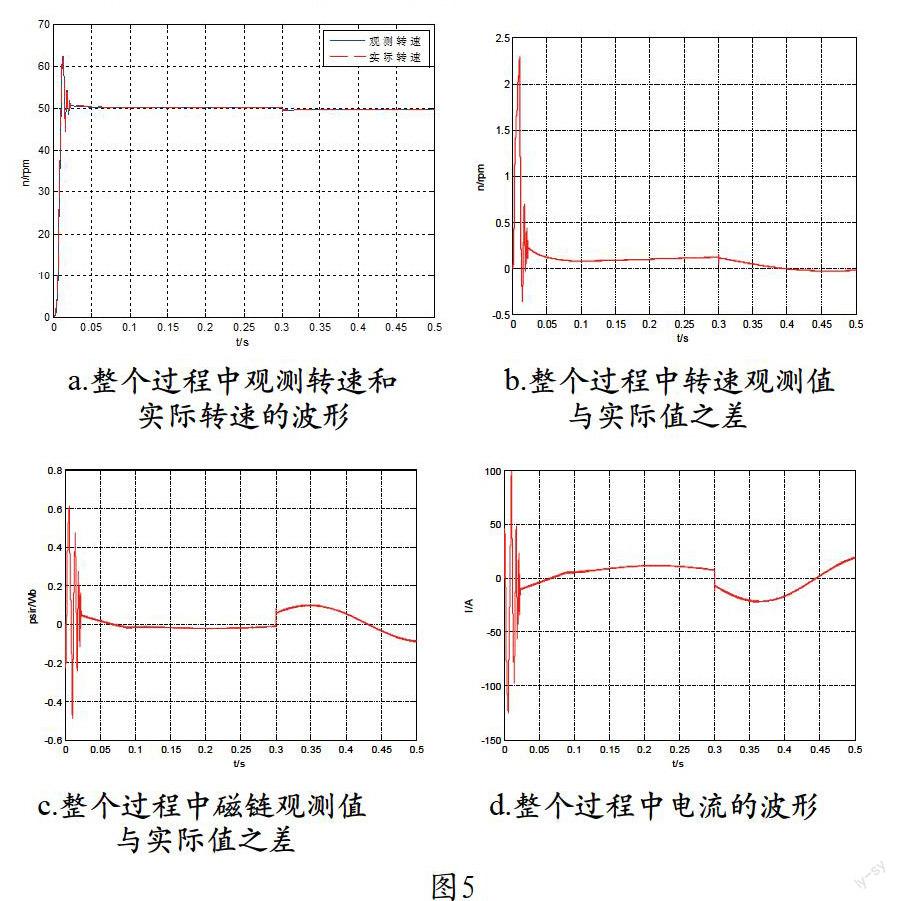
4.2 在低速时的仿真
波形分析:在整个过程中,转速的观测值和实际值的波形基本上重合;转速观测值与实际值之差在稳定状态下接近于0;磁链观测值与实际值之差很小;电流波形为标准的正弦波。
5 结语
(1)基于定子电流的模型参考自适应系统的矢量控制,具有优良的动静态调速性能,其响应速度很快、磁通的变化很小、稳定性很好。由于是直接启动,所以其启动电流很大。(2)基于定子电流的模型参考自适应系统的矢量控制,无论是在高速还是在低速,都有着良好的跟踪性能。高速时,转速观测值与实际值误差为1rpm左右;低速时,转速观测值与实际值误差为0.2rpm。与传统的以电压模型为参考模型的模型参考自适应法相比,其速度观测范围更广。
参考文献
[1]阮毅,陈伯时.电力拖动自动控制系统[M].北京:
机械工业出版社,2009.
[2]洪乃刚.电力电子和电力拖动控制系统的Matlab仿真
[M].北京:机械工业出版社,2006.
[3]马小亮.怎样才能扩展IM无转速传感器VC系统的调
速范围[J].电气传动,2011,(1).
[4]李永东.交流电机数字控制系统[M].北京:机械工
业出版社,2004.
[5]Teresa Orlowska-Kowalska,Msteusz Dybkowski.Stator-
Current-Based MRAS Estimator for a Wide Range Speed-
Sensorless Induction-Motor Drive[J].IEEE
TRANSACTIONS ON INDUSTRONICS,2010,(4).
(责任编辑:黄银芳)
