高压电线除冰机控制系统的设计*
2016-05-30姜存学
张 莹,姜存学
(江汉大学文理学院机电与建筑工程学部,湖北武汉430056)
高压电线除冰机控制系统的设计*
张莹,姜存学
(江汉大学文理学院机电与建筑工程学部,湖北武汉430056)
摘要:除冰机针对高压电线的结冰问题,提出一种机械除冰方式的控制系统设计。该系统基于PLC控制,提出完整的除冰及移位控制方案。可根据控制要求方便改进,每次都能复位到原位再停止,保证了系统的安全性;再与铣削原理除冰的机械部分结合,构成一个完整的设计系统,高效的解决了高压线结冰的问题。
关键词:铣削除冰PLC控制复位停止
0引言
架高的高压输电线是远距离传输电能的主要方式,应用广泛,几乎随处可见。但是在严寒季节的时候,电线上容易结冰。线路覆冰过厚会使其负荷过重,压弯电线甚至折断;还能造成电路关键部位跳闸[1-3]。高压输电线覆冰问题严重影响了电力传输和使用,因此亟待解决[4-5]。常见除冰方式有人工除冰,物理除冰,撒盐除冰,机械除冰等,各有优缺点。本次设计采用基于PLC的控制方式,用机械方法去除输电线上的覆冰,高效环保,实用率高[6-8]。
1除冰机构工作原理
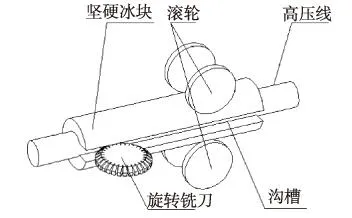
图1 除冰工作原理
高压线上附着的冰雪往往比较坚硬,难以一次清除。首先用铣刀将坚硬的冰块铣出一道沟槽,再配合滚轮碾压彻底压碎冰块,用“二次清理”方式保证破冰率。除冰机构机械部分设计如图1所示。
分析除冰系统的工作过程,主要的工作构件是铣刀和滚轮。铣刀的铣削过程包含了转动和直线运动两种方式;而滚轮的运动主要是滚动,滚轮通过滚动的方式压碎坚冰。将铣刀的转动和滚轮的滚动用一个电机来控制;铣刀的直线运动,用另一个电机来控制;所以,设计两个电机就能完成铣刀和滚轮的基本运动。如图2所示。

1.铣刀;2.圆盘;3.高压电线;4.模拟坚冰;5.滚轮;6.带传动;7.齿轮传动;8.蜗轮传动;9.传动电机;10.左右位移电机。图2 除冰机构的运动原理图
围绕该机构的主要工作方式分析。其中的电机9是传动电机,用来同时控制铣刀的转动和滚轮的滚动。电机9通过涡轮蜗杆传动,分别控制铣刀转动和传递动力给齿轮7;齿轮7通过传送带6传动给滚轮,从而让滚轮滚动。
电机10的主要作用是控制铣刀的直线移位,电机10的正反转分别控制铣刀在水平方向左、右移动。右移(电机正转)铣削坚冰,左移(电机反转)退出铣冰状态,为下一个位置的铣削做准备。在控制铣刀水平移动时,要特别注意:铣刀铣到什么位置?会不会破坏到线体?

图3 铣刀往返铣削示意图
为了保护高压电线不被铣刀割伤,在铣刀的下方安置了一个直径略大于铣刀直径的圆盘来保护电线;同时在电线边缘的对应位置安置一个限位开关,如图3中标示的右限位开关SQ2。当铣刀切削大部分坚冰而使圆盘逐渐靠近电线时,圆盘会先碰到右限位开关,而改变运动方向,左移退出沟槽。继续左移,碰到左边的限位开关(原位开关)时,已经退出铣出的沟槽,运动到下一处坚冰位置继续右移铣削。铣刀不停旋转,同时在左限位开关和右限位开关(原位开关)之间做往返的水平运动。如图3所示。
综上所述,电机9有转动和停止两个状态;电机10有正转、反转和停止三种状态。
2除冰控制系统设计
要设计除冰机构的控制系统,首先要分析该机构的控制要求:
1)机构每次从原位出发,也就是初始状态下左限位开关动作;
2)机构在左、右限位开关之间自动往返;
3)按下停止按钮,电机要完成一个周期的运动,回到原位以后才停止,保证下一次启动从原位出发。

图4 PLC外部接线图
结合除冰机构的控制要求,可以设计两个按钮:启动和停止。按下启动按钮电机9启动,同时电机10启动正转;当电机10正转(右移)到右限位开关,变为反转(左移);左移碰到左限位开关,正转,如此自动往返。
按下停止按钮,不论机构在哪个位置,都要完成这一个周期的动作,回到原位,碰到左限位开关才能停止,保证下一次启动从原位安全开始。
2.1输入/输出分配
根据控制要求,除冰机构的输入量有4个,分别是启、停按钮和左、右限位开关;而输出信号有3个,分别是控制电机9的驱动信号,电机10正、反转的接触器驱动信号。考虑15%的裕量,选择FX2N-16MR型号的PLC即可。输入、输出端子分配表如表1。
2.2PLC控制程序设计
2.2.1程序控制过程分析
1)输出驱动操作说明
表1
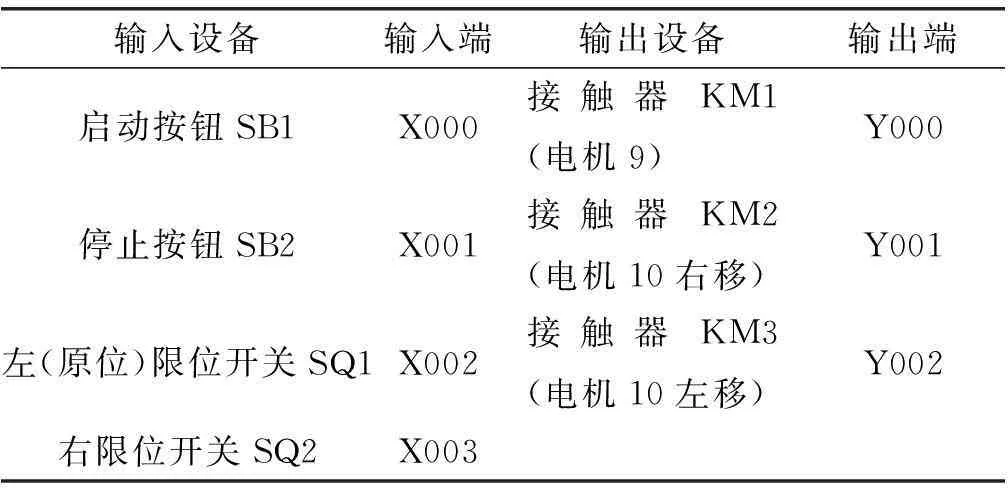
输入、输出端子分配表
表2
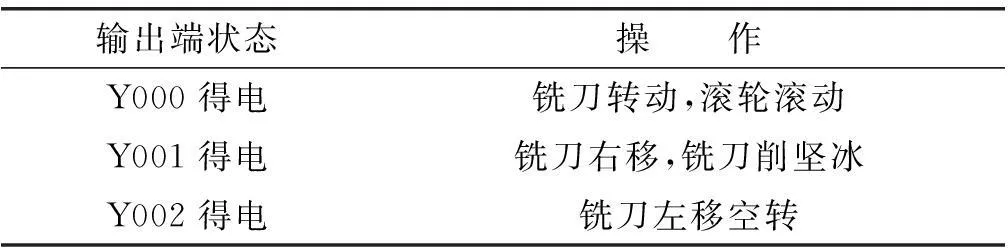
输出端操作
2)启动过程
按下启动按钮→Y0,Y1得电,铣刀右移动→右移碰到右限位开关X3→Y0,Y2得电,铣刀左移→左移碰到左(原位)限位开关→Y0,Y1得电,铣刀右移动,进入下一次循环。
3)停止过程
按下停止按钮,铣刀应该完成一个周期的运动后再停止,分两种情况讨论:
①当前铣刀处在左移状态,还未到达原位;这时铣刀继续左移,直到回到原位,碰到左限位开关,才执行停止操作,所有的Yi均失电。
②当前铣刀处在右移状态;这时铣刀需要先右移到右限位开关的位置,继续变为左移状态,直到回到原位,碰到左限位开关,完成一个周期,才执行停止操作,所有的Yi均失电。
2.2.2程序设计梯形图
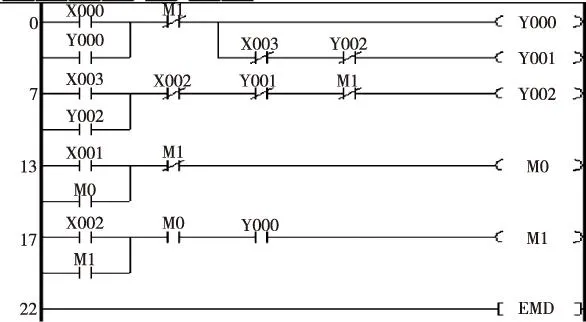
图5 程序梯形图
2.2.3程序模拟实现
在实验室中用软件模拟整个操作过程,将分步骤实现以上的控制。
1)按下启动按钮X0(点动按钮)以后,Y0,Y1得电,铣刀转动,滚轮滚动,铣刀右移(阴影部分表示该线圈得电或该触头闭合);
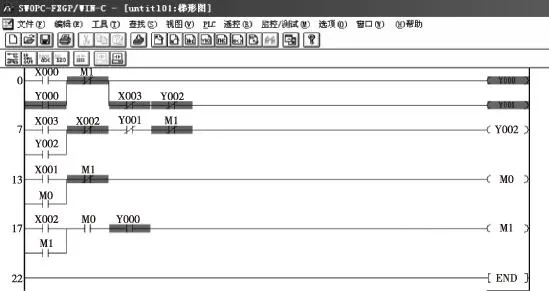
图6
2)右移碰到限位开关X3,Y0,Y2得电,铣刀转动同时左移;
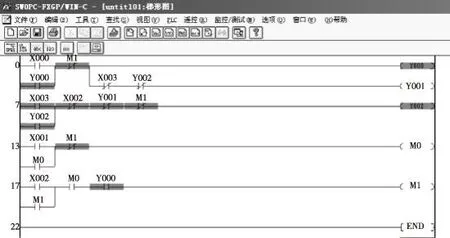
图7
3)左移碰到限位开关X2,Y0,Y1得电,铣刀转动同时右移,自动往返;

图8
4)当处在左移状态时,按下停止开关X1(点动)以后,Y0,Y2保持得电,继续动作;M0得电为回到原位时停止做准备;
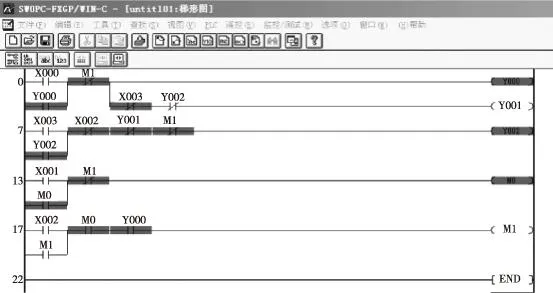
图9
5 )当回到原位,碰到原位开关X2,电路断电停止;
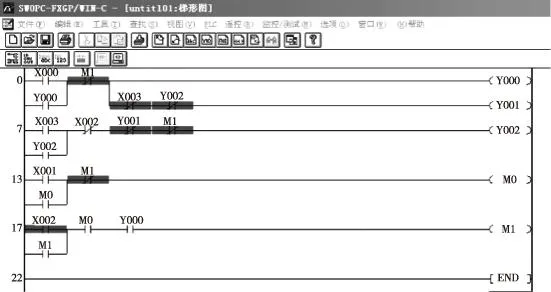
图10
6)当处在右移状态时,按下停止开关X1(点动)以后,Y0,Y1保持得电,继续动作;M0得电为回到原位时停止做准备;直到回到原点碰到X2以后,停止,同上。

图11
3小结
本文设计了一种机械式的除冰方法,并配合基于PLC的控制系统,在程序的可编程性方面是非常灵活和方便的。在设计控制系统中充分考虑安全性,要求每次停止的时候,机构都回到原位,为下一次重新启动做准备。结构合理,设计高效,具有实用价值。
参考文献
[1]郭文凤,张启功. 模块式高压电线除冰器设计[J]. 科技视界,2012(26)271-272.
[2]莫荣. 高压线自动除冰器设计[J]. 大观周刊,2012(48)130-131.
[3]张海霞,孙炜,繆思怡.高压输电线除冰机器人的建模及运动控制[J]. 计算机工程与应用,2010,46(10):190-192.
[4]王超,魏世民,廖启征.高压输电线上除冰机器人的系统设计[J].机械工程与自动化,2010(1)148-149.
[5]王聪,孙炜,向阳琴.输电线除冰机器人运动控制系统设计[J].微计算机信息,2010,26(32):141-142.
[6]王耀南,魏书宁,印峰,杨易旻,等.输电线路除冰机器人关键技术综述[J]. 机械工程学报,2011,47(23):30-38.
[7]朱建鑫,王跃进,郑威,张杰,等.一种架空电线除冰器的设计[J]. 山东工业技术,2015(15)247-248.
[8]刘建伟,周娅,黄祖钦,廖燕军,等. 高压输电线路除冰技术综述[J]. 机械设计与制造,2012(5)285-287.
姜存学(1972-),男,湖北随州人,副教授,博士,主要从事机械自动化设计,机械电子,计算机应用研究方面的科研和教学工作,担任江汉大学文理学院机电与建筑工程学部主任。
Design of the control system of the deicing device for overhead power lines
ZHANG Ying, JIANG Cunxue
Abstract:In this paper, we designed the control system of the deicing device for overhead power lines. The system was based on PLC control, with a complete control scheme of deicing and displacement, which could be improved according to requirements, and could be reset to its initial position and stop every time to ensure safety. Combined with the mechanical parts which deice by milling, the whole deicing device was completed, which could efficiently prevent the overhead power lines from icing up.
Keywords:deicing by milling; PLC control; reset and stop
收稿日期:2015-10-11
作者简介:张莹(1982-),女,湖北武汉人,讲师,硕士,主要从事机械电子工程,数字化设计等方面的科研和教学工作,担任江汉大学文理学院机电与建筑工程学部机制专业负责人。
基金项目:武汉市教育局课题,项目号:2008K095。
中图分类号:TP29
文献标识码:A
文章编号:1002-6886(2016)02-0091-04
