模糊多级融合技术在化工故障诊断中的应用
2016-05-28刘兰英
刘兰英
摘 要:为提高化工故障诊断的可靠性,文章提出一种基于模糊多级融合的故障诊断方法,在传统模糊信息融合故障诊断的基础上,将各诊断方法的局部诊断结果重新融合后再进行系统的全局故障诊断,同时根据模糊融合方法的实现需求提出评价系统,对权重值进行修正,从而提高故障诊断的快速性与准确性。通过实例分析表明该诊断模型的可行性。
关键词:化工故障;模糊融合;故障诊断
故障诊断技术是一门涉及建模与控制等多领域的综合性技术[1]。近年来,随着模糊理论和多源信息融合技术的兴起,人们又将模糊信息融合技术应用于故障诊断领域,提出模糊信息融合故障诊断方法[2],并取得一些研究成果[3- 5]。对于单诊断资源的诊断结果而言,由于算法设计或者知识水平和经验局限性,可能存在诊断过程片面性和主观性。面对一个实际系统故障问题时,智能诊断和多方专家诊断在诊断过程中,可能存在每个诊断方法在诊断群体中的重要程度各异。为此,本文提出基于模糊多级故障诊断方法,该方法在传统的模糊诊断融合的基础上,将各诊断资源的局部结果进行二级融合,并对权重值用评价系统进行修正。
1 模糊多级故障诊断融合结构
模糊集思想是将普通集合中的隶属关系从原来只能取0和1扩充到[0,1]区间中的任一数值,因此适合对诊断信息不确定性、片面性进行描述和处理。在化工故障诊断系统中常会同时存在多种诊断资源对同一类或不同类的故障进行诊断。当不同诊断资源各自反馈诊断结果时,多诊断结果多级模糊故障诊断融合结构如图1所示。
模糊多级融合中心接收多个诊断结果,首先对不同结果进行特征提取,每个结果包含2个值,即PRE_ RESULT[i]={result,DA}。Result指在诊断结果中应用常量值,DA指诊断资源的信息集合,DA集合包括如诊断资源ID、诊断资源权重值等。诊断结果特征被提取后,将所有结果特征值进行模糊多级融合算法处理,然后将全局融合结果输出,输出结果也应包含的内容为POS_RESULT[i]= {result, p, k},其中result是全局融合结果代表特征值,p是融合结果可信度百分比,k指全局融合结果与局部诊断结果相似值。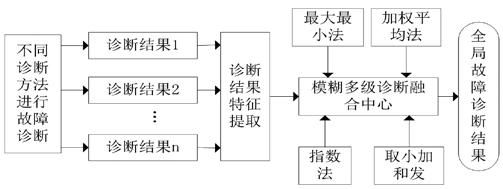
1.1 融合原理
模糊理论[6]不仅考虑诊断资源各自重要程度,而且强调各诊断资源间会相互关系、相互制约从而对整个融合结果的影响。模糊理论为多诊断资源结果融合提供一个新途径。具体融合原理如下。
在模糊多级诊断中,设A={A1,A2,…,Ai}为诊断资源所组成集合,i为故障诊断系统中诊断资源个数,也就是智能诊断资源和专家诊断资源参与该次诊断个数。各诊断资源对第n种故障的隶属度诊断结果可以记为:Sj(A)={Sj(A1), Sj(A2),…,Sj(Ai)},1≤i≤m,1≤j≤n,则:
i=1,2,3,…,m,由于各诊断资源诊断能力不同,所以它们对不同故障诊断都对应一个权重值,表示该诊断方法在决策时其诊断结果对全局结果影响程度。在这权重主要包括两部分:各诊断资源可信度值R和各诊断资源能力等级G。R={r1,r2,…,rn}T,0≤ri≤1。它根据以往诊断经验得到,以后可以根据实际任务诊断准确率来进行相对应变化。设G={g1,g2, …,gm},各元素取值范围为{1,2,3},表示三个诊断等级。则权重集合为:

为保留各不同运算模型的全部诊断信息,上式模糊算子“ ° ”采用模型M(·,+)进行计算。
1.2 权重设计
上文已叙述如何实现模糊多级诊断融合,在融合需求下,首要解决问题是如何设计不同诊断资源在诊断中权重问题。诊断资源权重值在系统运行中被不断优化,权重值大小决定于诊断结果与用户评价共同作用结果。诊断资源特别是专家诊断往往在诊断过程中加入一些主观因素,权重值设计正好可有效消除主观因素带来的不良影响。设计时,令所有诊断资源权重值初始化为0.5,每次诊断结果融合完毕后,系统会根据输出结果可信度p值和融合结果与诊断资源的局部诊断结果相似度k的大小,提高或降低诊断资源在该诊断中权重值。为使诊断方法权重值更符合实际使用需求,在设计对权重值不断修正环节上,提出评价系统方法。
化工用户根据诊断结果是否能解决化工故障问题,在客户端上对诊断结果评价,评价等级分为:(1)有效解决故障;(2)部分解决故障;(3)未能解决故障3个等级。系统根据用户评价等级,并结合p,k值,通过推理共同作用于诊断资源权重值。另外,专家同样可通过查阅历史诊断案例,对诊断结果进行评价。权重值具体修正过程如图2所示。注意,权重修正过程增量a,b,u,v,z值大小均由用户在系统中自定义,对于不同诊断对象,增量值大小可能会存在一定差异。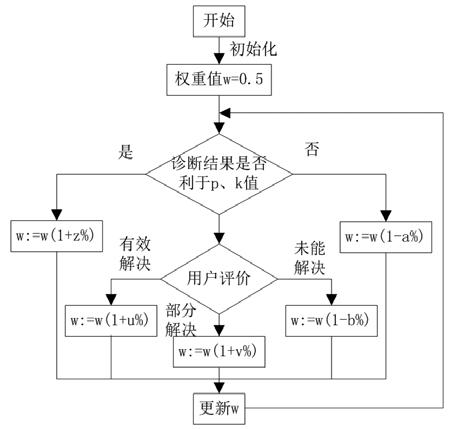
1.3 模糊决策
求出最终诊断信息D后,可按最大隶属、阀值和择近原则等方法进行模糊判决。为提高全局诊断精度,将最大隶属与阀值原则结合使用的方法:
(1)诊断故障应具有最大隶属度;2)诊断故障隶属度应大于设定阀值,且设定阀值α∈[0,1],记d0=max(di),i=1,2,…,n。若d0<α,则“拒绝识别”判决,说明提供的故障诊断信息不足,在诊断人员补足信息之后再重新判断;若d0≥α,则按最大隶属原则判决目标类别。(2)目标类别与其它类别隶属度之差必须大于设定阀值γ,即:

阀值α,γ的确定目前没有统一理论方法,应用最多的是对系统进行多次实际试验后结合专家经验,通常是人为参考多次试验结果后进行比较取得。
2 诊断实例
本文对化工过程的油缸模拟故障诊断进行试验研究,以验证所提方法正确性。设油缸有活塞杆与导套拉伤(S1)、液压油含有气泡造成油缸爬行(S2)、缸内异物堵塞(S3)、密封件损坏变形(S4)、油缸上盖开裂(S5)、油缸阀座漏油(S6)6种故障状态。将这些故障作为故障诊断集S:S={S1,S2,S3,S4,S5,S6}。实验过程中有诊断资源A1,A2,A3参与诊断:A={A1,A2,A3}。各诊断资源可信度权重为: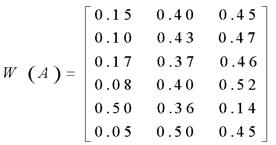
通过对诊断资源原始数据进行分析计算,得到六种模拟故障与3个诊断资源间的隶属度值如表1所示。
分别用上述4种运算模型进行模糊一级融合,根据式(12)得出模糊一级融合输出为:
由式(13)得全局诊断融合矩阵O为: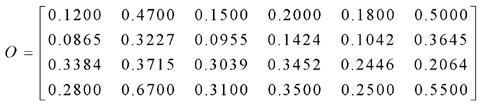
设4种运算模型的比重因子为:C=[0.10 0.15 0.35 0.40]。根据式(14)进行二次模糊融合诊断信息为:D=C○O=[0.2554 0.4934 0.2597 0.3022 0.2192 0.3969]。根据模糊决策原则,根据多次试验,结合专家经验,设定阈值α=0.45,γ=0.05,则d0=max(di)=d2=0.4934>0.4500(i=1,2,…,6);d2-di>0.0500(i≠2)。由此得出最终诊断结果为故障S2,液压油含有气泡造成的油缸爬行故障。
3 结语
[参考文献]
[1]CHANG S Y,CHANG C T.A fuzzy-logic based fault diagnosis strategy for process control loops[J].Chemical Engineering Science,2003(15):3395-3411.
[2]朱大奇,刘永安.故障诊断的信息融合方法[J].控制与决策,2007(12):1321-1328.
[3]朱大奇,于盛林,田裕鹏.应用模糊数据融合实现电子电路的故障诊断[J].小型微型计算机系统,2002(5):633-635.
[4]刘莉,任文举.模糊信息融合在无损检测技术中的应用研究[J].机械工程与自动化,2006(3):73-77.
[5]杨广,吴晓平.基于模糊信息融合的船舶动力装置综合故障诊断方法研究[J].船舶工程,2007(6):5-8.
[6]Keller JM,Osbom J.T raining the Fuzzy Integral[J].International Journal of Approximation Reasoning,1996(1):1-24.[7]陈水利,李敬功,王向公.模糊集理论及其应用[M].北京:科学出版社,2005.
Application of Fuzzy Multilevel Fusion to Chemical Fault Diagnosis
Liu Lanying
(School of Automation, Guangdong University of Technology, Guangzhou 510006, China)
Abstract: To enhance the reliability of chemical fault diagnosis, a fault diagnosis method based on fuzzy multilevel fusion was developed. Overall fault diagnosis was carried out after fusing again the partial diagnostic by each diagnosis method, and proposed a evaluation system to correct the weight value based on the requirements of fuzzy fusion. The result of the example shows that the diagnostic model could improve the evaluation process and the accuracy of fault diagnosis.
Key words: chemical fault; fuzzy fusion; fault diagnosis
