面向车辆监控的LBS地图可视化技术研究
2016-05-25吴晓明,邢廷炎,钱建平,杨信廷*,范蓓蕾
吴 晓 明,邢 廷 炎,钱 建 平,杨 信 廷*,范 蓓 蕾
(1.中国地质大学(北京)信息工程学院,北京 100083;2.国家农业信息化工程技术研究中心,北京 100097)
面向车辆监控的LBS地图可视化技术研究
吴 晓 明1,2,邢 廷 炎1,钱 建 平2,杨 信 廷2*,范 蓓 蕾2
(1.中国地质大学(北京)信息工程学院,北京 100083;2.国家农业信息化工程技术研究中心,北京 100097)
为解决LBS技术中组件式地理信息服务在车辆监控应用中研发成本和应用门槛较高的问题,基于第三方地图服务,研究分别从数据层、中间处理层与用户交互层出发,实现坐标系统转换、空间数据筛选与图形叠加等监控数据地图可视化关键技术,将数据层中不同源空间数据筛选转换成用户层中图形可视化交互信息。研究实现实时位置追踪与车辆行驶轨迹等基础功能,验证了监控数据地图可视化技术的可行性;并测试空间数据筛选技术的有效性,数据筛选率最高为30%。
LBS;第三方地图服务;车辆监控;地图可视化;数据筛选
0 引言
基于位置服务技术(LBS)在车辆定位监控中的应用,可有效避免因车辆位置信息获取不及时造成的运输资源浪费,且有利于物流管理者对车辆进行动态可视化监控,提高车辆调度能力[1,2]。
LBS是导航定位、地理信息服务及无线通信等技术相融合的产物,其中导航定位技术为LBS提供数据源,而地理信息服务负责地理信息(包括导航定位数据)的存储、处理与发布展示,其作为直接 与用户交互的重要媒介,是车辆监控应用中需重点解决的问题[3-5]。目前研究主要是基于ArcGIS Engine、ArcGIS Silverlight、mapGIS IServer等国内外地理信息服务组件实现车辆监控相关功能[6-8],该类地理信息服务依赖专业开发组件,研发成本较高。随着以百度等为代表的第三方地图服务的发展,基于第三方地图服务的车辆监控因低成本和高灵活性受到广泛关注,如王小康等运行于Google Map平台的智能公交系统[9],李西平等基于天地图的移动设备定位系统[10],以及Dimil等将Coogle Map应用于智能车辆监控[11]。由于第三方地图服务的相对独立性以及导航定位设备的数据误差,第三方地图应用过程中需要对车辆监控数据进行处理,而以上研究侧重总体框架设计与实现,并未提及监控数据处理及地图整合应用中的具体方法和技术细节。
本研究将以第三方地图服务为载体,构建基于B/S架构的远程车辆监控系统框架,从数据层、处理层到交互层,对监控数据进行转换筛选等处理,解决第三方地图服务应用中的空间数据可视化关键技术问题,为提高车辆动态监控与调度提供技术支持。
1 远程车辆监控框架设计
远程车辆监控根据获取的车辆位置信息,在第三方地图上提供可视化交互功能,根据实现功能,基于LBS的车辆监控总体框架从核心到外围,划分为3个层次,即数据层、处理层和用户层(图1)。

图1 系统技术框架
Fig.1 System technical framework
数据层为用户提供用于分析、处理及展示的基础数据,包括地理空间数据和其他基础信息数据。由于系统中涉及不同源空间数据,地理空间数据可分为两部分:第三方地图服务提供的地图矢量数据及访问端口;导航定位设备实时接收并存储的坐标数据。坐标数据可通过GPRS等途径更新到数据库中,库中每条数据记录除存储基本的经纬度坐标外,还存储经纬度坐标的接收时间。
处理层是数据层与用户层间的空间数据交换通道,将数据层中的数据信息转化成用户层中的图形信息,主要包括空间数据交换、异源数据叠加以及数据处理模块。其中,数据处理模块具有坐标系转换、数据筛选等功能。针对基础信息数据而言,用户层与数据层可实现数据的直接交换。
用户层是直接与用户进行交互的媒介,主要为用户提供车辆实时跟踪、历史轨迹等核心交互功能以及其他相关信息的可视化查询展示。实时跟踪功能将车辆位置即时更新在第三方地图上;历史轨迹则提供车辆行驶路线的回溯与重演;信息查询通过多种方式获取车辆及其他相关属性信息。
第三方地图服务与导航定位设备提供的坐标数据基于不同的坐标系统,且导航定位数据存在冗余与异常坐标等问题,数据层中导航定位数据通过处理层加工后,才能满足用户层的可视化要求。因此,每当用户层提取空间数据时,坐标转换、数据筛选等操作都要重复执行,且通常每次操作结果无明显差异。为提高效率,导航监控数据存储在3个子数据库中,分别用于存储原始数据、坐标转换数据及筛选数据,原始数据是导航定位设备传送过来的未经任何处理的经纬度坐标;转换数据指转换到第三方地图坐标系统下的位置数据;而筛选数据指剔除重复点与异常点后的正常数据。用户层可根据需要从不同子数据库中提取数据。
2 监控数据地图可视化关键技术
基于LBS的车辆监控技术的核心在于监控数据在第三方地图服务中的交互可视化,可视化处理过程不仅要解决不同源空间数据的坐标转换问题,还要解决监控数据在第三方地图底图上叠加的预处理问题。本研究以第三方地图为参考标准,从数据层到用户层,依次对导航监控数据进行坐标系统转换、空间数据筛选、图形叠加显示等操作。以下将以百度地图与GPS设备为例,对关键技术实现细节进行说明。
2.1 坐标系统转换
GPS设备坐标通常基于WGS84空间坐标系统定义,而第三方地图服务出于安全考虑,普遍采用加密坐标系统,如高德地图采用GCJ02坐标系统,百度地图采用自定义的BD09坐标系统,因此,如直接将GPS设备坐标与第三方地图叠加显示,坐标系统的不一致性会导致GPS坐标在地图上显示产生位置偏移现象。为解决异源空间数据坐标系统不一致问题,研究以第三方地图坐标系统为参照标准,通过自定义纠偏函数对所有GPS设备监控数据进行纠偏操作,以百度地图为例,就涉及WGS84与GCJ02坐标系统,GCJ02与百度BD09坐标系统间的转换操作。
针对WGS84坐标系→GCJ02球面坐标系→百度地图坐标系统转换过程,百度地图服务提供了相对应的纠偏函数,但频繁访问该函数会加重网络负载。研究拟利用百度纠偏函数,通过图形变换原理建立系统自定义纠偏函数,以降低网络负载。在精度要求不高的情况下,小范围内可忽略地球曲率的影响,百度坐标系统与WGS84坐标系统中的点可通过仿射变换(即平移、缩放与旋转)进行一一映射。建立的仿射变换模型如下:
(1)
其中:(X,Y)为目标坐标系统下的经纬度坐标;(x,y)为原始坐标系统下的经纬度坐标;(a0,b0)为两坐标系统间相对原点的平移距离;(m1,m2)分别为横向与纵向的缩放因子;α为两坐标系统间的旋转参数。
自定义纠偏函数应用中首先划定固定大小的地理范围,并从范围内选取一系列特征点,然后利用百度纠偏函数分别获取特征点在WGS84与百度地图坐标系统下的经纬度坐标,再通过以上仿射变换模型,求算模型参数。将模型参数代入变换模型,即该范围内自定义纠偏函数;构建纠偏函数后,所有GPS设备接收的经纬度坐标都通过自定义纠偏函数转换到百度地图坐标系统中。当经纬度坐标超出划定的地理范围时,重新计算仿射变换参数,以构建新的自定义纠偏函数,从而避免频繁访问百度提供的纠偏函数接口,以提高响应速度。
2.2 空间数据筛选
导航监控数据是车载GPS设备实时接收并存储的海量经纬度坐标点,坐标点经过处理层解析可转化成车辆位置、历史运行轨迹等图形可视化信息。由于监控数据未经任何处理直接导入平台数据库中,其中不仅存在空数据,而且存在大量的冗余和异常坐标点。用户层提取数据使用前,首先将空数据剔除,再对冗余和异常数据进行筛选处理,能够有效缩短车辆位置或历史轨迹在第三方地图上的加载时间。 本研究以距离和角度为判断标准,对原始监控数据进行筛选处理,处理结果存储到筛选数据库中,具体步骤如下:
(1)车辆导航监控设备通常会以固定的时间间隔,实时接收GPS经纬度坐标,并通过GPRS等手段上传到数据层空间数据库中。当连续接收到的多个经纬度坐标点相同或点间距较小时,车辆可能长期处于静止或行驶缓慢状态,此时只需获取代表性坐标点就能完整表达空间信息,从而剔除掉大量冗余点。实际操作中考虑两种情况:当多个坐标点相同时,只取其中一点即可;当多个坐标点间距较小时,可取多个点的坐标平均值。点间距较小坐标点的判定及坐标平均值的计算方法如下:①从任意点开始取点,作为当前点。②按顺序取相邻点,计算与当前点的距离d。③如d不超过规定阈值,则取两点的中间位置点Z,并将其作为当前点,转到②;如超过阈值,则转到①,开始新一轮迭代。
(2)在重叠度较高的冗余坐标点基本被剔除后,下一步要通过角度对异常点进行筛选操作。顺序选取3个连续坐标点,计算将三点连接所形成角的大小。当三点构成角小于一定角度时,则说明三点中的中间点存在异常,可将该点剔除。具体如图2所示:连接A、B与C三点可构成角α,由于α角度过小,而实际车辆行驶过程中不可能存在较小转弯半径,则B点可视为异常点予以剔除。

图2 异常点剔除
Fig.2 Abnormal point elimination
(3)经过以上步骤后,冗余点与异常点都被剔除掉,剩余点完全可以满足用户层的图形可视化需求。但是,针对车辆历史轨迹回放功能,仅保留车辆轨迹特征点就能将车辆行驶路线表达出来,同时加载所有剩余坐标点并连接成线反而会降低效率。因此该步骤要筛选出能表达车辆行驶轨迹的特征坐标点。操作过程同样是顺序选取3个连续坐标点,计算三点连接所构成角的大小。如图3所示,坐标点A、B与C顺序连接构成角α,当α角度过大时,坐标点A与C直接连接所形成的线段与三点构成的线段几乎重合,因此,可将三点所构成折线视为直线,连接A与C点近似表达该段行驶轨迹,轨迹回放时使用特征点A与C。

图3 特征点提取
Fig.3 Feature point extraction
以上步骤(2)与(3)中都是以角度为标准对坐标点进行筛选,因此涉及角度计算问题,公式如下:
a=cos-1[(lAB2+lBC2-lAC2)/(2*lAB*lBC)]
(2)
式中:lAB、lBC与lAC分别为线段AB、BC与AC的长度。
2.3 图形叠加处理
图形叠加处理是将导航监控数据解析成点、线等图形,按照用户需求叠加显示在第三方地图上,为用户提供可视化的交互环境。监控数据经过坐标系变换与筛选处理后,其坐标系统不仅与第三方地图坐标系统完全匹配,且坐标点数量也能保证车辆导航位置信息的清晰表达。
当描述车辆所处地理位置时,监控数据以点的形式覆盖在第三方地图上;当描述车辆行驶路径时,则需将多个坐标点数据顺序连接,以折线的形式表示车辆的行驶轨迹。为实现图形叠加,点、线等数据需要加载到第三方地图支持的图层,再将该图层叠加到地图底图图层上。例如,百度地图是通过创建Marker与Polyline图层实现图形的叠加。
通常情况下,由于没有信号或信号不稳定等原因,数据层导航监控数据会出现长时间接收到空数据或异常数据的现象。经筛选处理后,空数据与异常数据被剔除掉,但顺序连接筛选后坐标点表示车辆行驶轨迹时,可能出现较长距离内特征坐标点缺失的现象,从而产生与实际行驶路线不相符的异常轨迹(图4)。图4中,如果监控数据正常接收,顺序连接坐标点应与车辆实际行驶轨迹相重合,即A-E-F-B相连接所构成的线段应覆盖于第三方地图中的对应道路上,而筛选处理后的监控数据仅剩下坐标点C与D(两点间的空数据与异常数据被剔除掉),连接后与实际行驶轨迹有误差,因此,需要结合第三方地图将异常路径拟合到实际轨迹上。

图4 异常轨迹
Fig.4 Abnormal routes
针对以上问题,研究将其分为以下两种情况考虑:1)从坐标点C到D连续通过多个道路网络节点,车辆行驶轨迹存在多种可能性。2)坐标点C与D中间不存在道路网络节点,车辆行驶轨迹具有唯一性。车辆在实际行驶过程中,一般会选择最优路径(路程、时间最短),因此,无论符合以上何种情况,研究都以坐标点C与D作为起点与终点,基于第三方地图中矢量道路网络规划最优路径。
在异常轨迹拟合过程中,主要涉及两个关键问题,本文将以百度地图为例,给出问题的解决方法。
(1)搜索连接后可能形成异常路径的相邻坐标点:正常情况下,监控数据是按照固定的时间间隔接收的,因此,当顺序取两坐标点时,两坐标点接收时间大于一定间隔,且相邻两坐标点距离大于一定阈值,则判定该两点连接后会形成异常路径。
(2)矢量路网提取与最短路径规划:百度地图服务提供详细的矢量路网拓扑数据以及数据访问端口。通过函数 DrivingRoute.setSearchCompleteCallback()可返回任意两点间的最优路径;在获取最优路径后,DrivingRoute.getResults().getRoute().getPath()函数可用于提取构成该路径的多条折线段,再将提取折线段与其他正常路径连接即拟合成车辆的行驶轨迹。
3 远程车辆监控实现
以上从坐标系统转换、异常冗余点筛选、异常路径处理方面详细说明了基于LBS的车辆监控数据地图可视化关键技术,重点解决了第三方地图服务在车辆监控应用中的基础性技术问题。研究以百度地图为载体,设计B/S架构的远程车辆监控平台,并利用以上关键技术,实现车辆实时位置和运行轨迹等核心基础功能,如图5与图6所示。
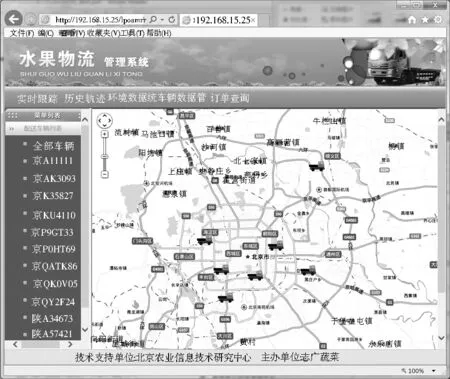
图5 实时位置跟踪
Fig.5 Real time location
图5是将所有监控车辆叠加显示在百度地图上,车辆位置由经过坐标系统转换的经纬度坐标决定,由于监控数据以固定时间间隔传送到数据层,车辆位置也随数据层数据更新而发生变化。图6显示的曲线即表示车辆在某段时间的行驶轨迹。曲线实际是由一系列经过坐标转换、异常点筛选后的坐标点连接而成,图中汽车图标表示行驶终点,球表示行驶起点。

图6 运行轨迹回放
Fig.6 Driving route playback
为测试空间数据筛选技术对车辆监控数据的影响,以图6中轨迹为例进行说明。图6中车辆约行驶25 min,将整条轨迹按时间平均分为五部分,对每时间段的原始监控点数量、冗余点剔除及特征点提取处理后的点数量进行比较分析。如表1所示,T1-T5分别表示车辆从起点行驶到终点的5个时间段,N1为原始监控坐标点数量,N2为剔除重复度较高冗余点后的点数量,N3为剔除异常点后的点数量,N4为特征点提取后剩余的点数量。由表1分析,空间数据筛选处理后,筛选率最高为30%,最低为9%,具体由车辆行驶速度、道路状况及GPS数据质量决定。时间段T1与T5中,剔除冗余点数量最多,主要是由于车辆在起点及终点处行驶速度较慢造成的;时间段T1中出现异常点可能是由于经过立交桥时GPS信号较弱的原因;而时间段T1与T2时,行驶道路较为平直,保留部分特征点即能表达车辆行驶轨迹。
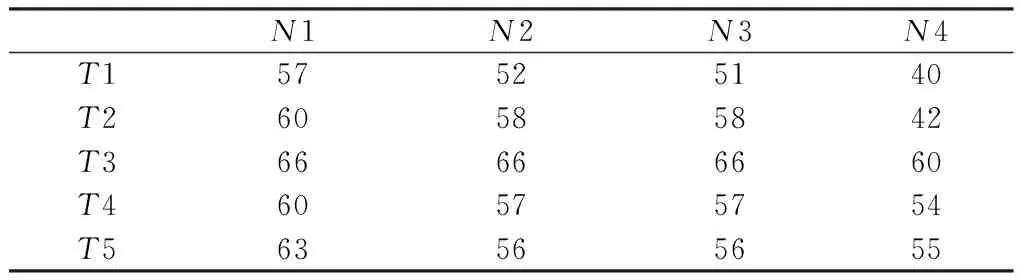
表1 数据筛选前后数据量比较Table 1 The geo-data quantity comparison before and after data filtering
图7是车辆异常轨迹的拟合验证效果,左图为未进行处理的原始行驶轨迹,右图为处理后的行驶轨迹。从图中可以看到,剔除异常数据与空数据后,车辆轨迹存在大量的断点,而采用异常轨迹拟合方法后,除了方框标注处未能较好拟合外,其他断点都得到妥善处理。

图7 异常路径处理对比
Fig.7 Abnormal route before and after the processing
4 结论
基于LBS技术的车辆监控有利于对车辆进行动态可视化监控,提高车辆调度能力,但作为LBS技术关键要素的传统组件式地理信息服务,研发成本与应用门槛都较高,因此,本研究基于第三方地图服务,构建远程车辆监控框架,从数据层到用户层,重点解决监控数据在第三方地图应用中的地图可视化关键技术问题,在此基础上,实现实时位置追踪和历史行驶轨迹等车辆监控基础功能,较好验证了坐标系统转换、空间数据筛选与图形叠加处理等关键技术的可行性和有效性。
[1] 赵燕,杜文广,杨勇.基于云计算的移动公路运输监管系统[J].重庆交通大学学报(自然科学版),2014,33(5):120-123.
[2] HUANG Z C,HUANG D F,XU Z,et al.GPS vehicle positioning monitoring system integrated with CORS and mobile GIS[J].Procedia Environmental Sciences,2011,10:2498-2504.
[3] 李霖,王伟,谭永滨,等.导航与LBS关键技术标准化研究进展[J].测绘通报,2014(5):95-98,126.
[4] 许玉斌,陈秀万,黄岚岚,等.面向多应用系统的位置公共服务(LBCS)模式研究与平台设计[J].地理与地理信息科学,2012,28(3):40-43,48.
[5] 吴飞.基于MongoDB的LBS数据管理系统关键技术研究[J].测绘通报,2014(7):121-124.
[6] 吴建华.基于ArcGIS Engine的车辆监控GIS系统开发[J].地球信息科学学报, 2011,13(1):88-94.
[7] 何超,彭慧,尚文利,等.利用ArcGIS Silverlight实现的车辆监控技术[J].自动化仪表,2013,34(7):54-57.
[8] 李鹏.基于Flex的物流车辆主动式监控系统的设计与实现[J].测绘通报, 2012(5):97-99.
[9] 王小康,李景文.基于物联网与WebGIS的智能公交系统[J].测绘与空间地理信息,2015,38(3):69-70,74.
[10] 李西平,孙秋伟,张宏钊,等.基于Web GIS和LBS的移动设备定位追踪系统研究与实现[J].制造业自动化,2012,34(5):19-20,33.
[11] DIMIL J,SANATH P,SRIDHAR V G.Intelligent vehicle monitoring using global positioning system and cloud computing[J].Procedia Computer Science,2015,50:440-446.
Research on Vehicle Monitoring Oriented Map Visualization in LBS
WU Xiao-ming1,2,XING Ting-yan1,QIAN Jian-ping2,YANG Xin-ting2,FAN Bei-lei2
(1.School of Information Engineering,China University of Geosciences,Beijing 100083;2.National Engineering Research Center for Information Technology in Agriculture,Beijing 100097,China)
To lower the higher development cost and application threshold of component map service in LBS applied to vehicle monitoring,from data layer,middle process layer and user layer respectively,the key map visualization technology of coordinate system conversion,geo-data filtering and vector overlay was realized successively using the third-party map service.The heterogeneous geo-data in data layer was filtered and converted to the visualized interactive graph through the overall process above.The fundamental functions of real-time location and driving route replay was finished to verify the feasibility of monitoring data map visualization.Then the significance of the geo-data filtering was tested.The result shows that the filtering rate is up to 30%.
LBS;third-party map service;vehicle monitoring;map visualization;data filtering
2015-08-28;
2015-11-27
国家科技支撑计划课题(2013BAD19B04)
吴晓明(1983-),男,博士研究生,工程师,主要从事农产品物流研究。*通迅作者E-mail:yangxt@nercita.org.cn
10.3969/j.issn.1672-0504.2016.01.019
P208
A
1672-0504(2016)01-0100-05