一种基于面向对象的城镇道路自动提取方法研究
2016-05-25林鹏,阮仁宗,王玉强,陶婷
林 鹏,阮 仁 宗,王 玉 强,陶 婷
(1.河海大学地球科学与工程学院,江苏 南京 210098;2.山东省减灾中心,山东 济南250012)
一种基于面向对象的城镇道路自动提取方法研究
林 鹏1,阮 仁 宗1,王 玉 强2,陶 婷1
(1.河海大学地球科学与工程学院,江苏 南京 210098;2.山东省减灾中心,山东 济南250012)
城镇地物类型复杂多样,道路狭窄且易与周围地物混合,这导致城镇背景下的道路信息提取存在困难。该文以安徽省滁州市部分区域为实验区,使用资源三号卫星影像,采用面向对象的方法,利用光谱特征、形状特征等信息,在对象级基础上通过复合向量机的方法进行城镇背景下的道路信息循环拾取,并利用形态学方法对提取的结果进行了分类后处理。研究结果表明,该文提出的道路提取方法具有可行性。
道路;面向对象;知识规则;循环提取;数学形态学
0 引言
研究道路提取不仅可以为车辆导航提供准确的数据源,而且可以为城乡规划、管理及决策提供科学依据[1,2]。城镇道路具有更新速度快的特点,这使得道路信息的快速准确提取具有重要的现实意义。目前,利用高分辨率遥感数据进行道路提取主要有基于像元与面向对象两种方法[3]。基于像元的道路信息提取主要利用道路的光谱特征进行分析[4],并没有充分利用地物的空间特征(如形状特征、纹理特征、空间关系等)。随着遥感图像空间分辨率的提高,基于像元的遥感信息提取方法已经不能满足实际应用的需求。面向对象的分类技术不仅利用地物的光谱特征,还利用地物之间的关系特征(如语义关系、拓扑关系、形状特征等)。众多研究表明,在高分辨率影像分类上,面向对象的方法比基于像元的分类方法有着明显的优势[5-7],面向对象的分类结果不仅有更高的精度,还可以抑制杂斑的生成并提高空间信息的利用效率。
目前道路的提取往往针对于较大规模的城市,对于小城镇中广泛存在的水泥路、砾石路进行提取的研究较少。城镇地物类型复杂多样,道路狭窄且易与周围地物混合,这导致城镇背景下的道路信息提取存在困难[8,9]。本文采用面向对象的思想,利用国产的资源三号卫星的高空间分辨率图像,充分利用道路的多种特征信息,通过一种道路自动拾取的方法进行城镇背景下的道路信息提取,并采用数学形态法进行道路后处理,以期提高道路信息提取的精度。
1 研究区与数据
本文的实验区位于安徽省滁州市西部城镇,研究区面积10 km2,土地覆盖类别分为人工地物(道路、城镇居民地、工矿用地)和非人工地物(植被、水体、裸地、耕地)。道路中的沥青公路主要为国道、省道等高速路,路面较宽,在假彩色图像上呈暗色调;水泥路面主要分布在乡镇之间,路面宽度低于沥青公路,在遥感影像上亮度较高,极易与居民地、建筑物混淆;砾石路为沥青公路与水泥公路的支干或受损造成的,延伸到耕地中,在影像上亮度较暗,在假彩色影像上呈灰白色。城镇居民用地分布较集中,具有一定的纹理特征,屋顶在遥感影像上呈现出多样性;工矿用地位于城镇边缘,形状较为规则,无植被覆盖。
本文数据主要来自于资源三号卫星多光谱遥感器所采集的影像[10],获取时间为2013年1月18日。在全色波段的分辨率为2.1 m,多光谱波段的分辨率为5.8 m,对精确道路提取提供了保证。对获得的影像数据进行预处理:1)参照ZY-3卫星辐射定标系数进行全色波段和多光谱波段的辐射定标和大气校正;2)利用地面控制点进行几何校正;3)基于AWT算法进行全色波段与多光谱波段融合(图1)。
2 研究方法
本实验区中,道路穿插于建筑之间,加之各类建筑与道路的组成材料相同,所以混淆现象较为严重。因此,本文重点是如何准确地区分道路与建筑物。此外,研究区的植被、裸地、水体、工矿用地等地物也会对道路的提取产生一定的影响。为精确地进行道路提取,在结合本研究区实际情况的基础上,首先将植被、水体等非人工地物排除,然后对人工地物进行细分。

图1 研究区影像(预处理前后比较)
Fig.1 Image of study area(comparing before with after preprocessing)
2.1 影像分割
本文采用多尺度分割方法,基于影像对象的特征,解决产生斑块与真实地物边界拟合问题。分割对象的平均异质性最小化与像素的平均异质性最小化是影像分割的标准[11-13]。当异质性大于等于给定的尺度时,区域会停止生长,区域内像元合并形成对象。异质性的计算公式如下:
(1)
式中:f指图像对象异质性,wcolor为光谱异质性权重,wc为数据层的权重,σc为数据层上光谱标准差,wcpt为紧密度异质性,l为对象长度,b为目标多边形最短边,n为像元个数。
为准确选择分割尺度,减少主观经验造成的误差,本文选用ESP方法进行处理。它是以局部方差的标准偏差均值(LV)代表某块影像检查窗口中影像对象异质性,以变化率值(ROC)表示当前分割尺度与下一级分割尺度比值,用ROC-LV曲线反映不同分割尺度下局部方差LV的动态变化,ROC曲线中起伏最明显的波峰对应的尺度值则为最佳分割尺度(图2)。根据图2结果,对52、64、96、110四个尺度进行试验。通过分割地物离散性与像元纯度对比,分割尺度为52时效果最好,所以,本文最终确定尺度为52、形状因子为0.4、平滑度因子为0.5的多尺度分割。
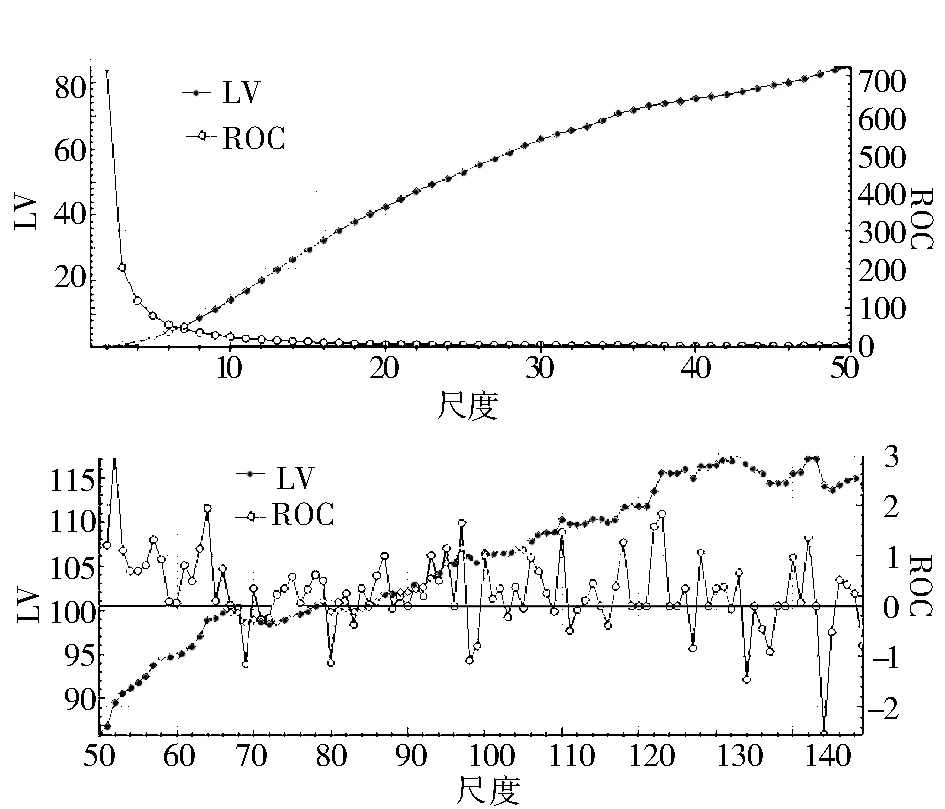
图2 ESP图
Fig.2 Image of ESP segmentation
2.2 影像特征提取
影像在经过多尺度分割后,得到具有一定同质性的像元集合体,形成对象。对象在原有光谱特征的基础上,根据地物成像状态提供了几何特征、纹理特征,以及通过分析和发掘不同尺度分割层图斑、图斑所属类别之间的拓扑关系和上下文语义得到的关系特征,可以进行更加精确的地物分类提取。根据现有研究成果,本文选用特征如表1[2-9]。
为提高分类地物的准确性,减少冗余特征的选择以及分类过程中的计算量,需从上述特征中选取能够更好区分道路与非道路的特征,以便达到最为满意的提取效果。为更好地确定不同特征对不同地物的影响效果以及对道路的区分性,对每一特征随机选取20个对象作为样本,记录每个对象对应的特征值,对每个特征值进行归一化处理,并绘制散点图进行分析(图3)。
由于建筑与水泥路之间以及裸地、植被与砾石路之间在光谱信息上存在着较高的相似性,仅通过波段组合及波段相互运算难以进行道路的精确提取。在亮度值方面,水体的亮度值明显低于其他地物,砾石路的亮度值与植被和裸地较为相似,水泥路亮度较高,但与大部分建筑相互混合而难以区分。土壤亮度指数方面,裸地与部分建筑发生混分,砾石路与植被较为相似。但在归一化植被指数中,植被与其他地物明显不同,可以较为精确地进行提取。道路指数方面,水泥路与砾石路的值并未得到较为明显的体现。纹理特征的非相似性统计中,水泥路与建筑混分情况严重,而植被与裸地的值普遍偏低。在形状指数中,水泥路、砾石路、水体的值偏高。密度指数中,水泥路、水体、砾石路的值较低,但也同部分建筑区域值类似。而在长宽比上,道路与水体由于地物特点导致值明显偏高。最后,确定采用光谱特征、纹理特征与自定义特征结合的方法进行水体、植被、裸地的初步粗提取,减少误分割面积的同时提高道路提取效率。然后,在未分类地物中采用几何特征与语义特征相结合的方法对道路进行提取。初步提取流程如图4所示。
表1 特征值选择
Table 1 Choice of characteristic value
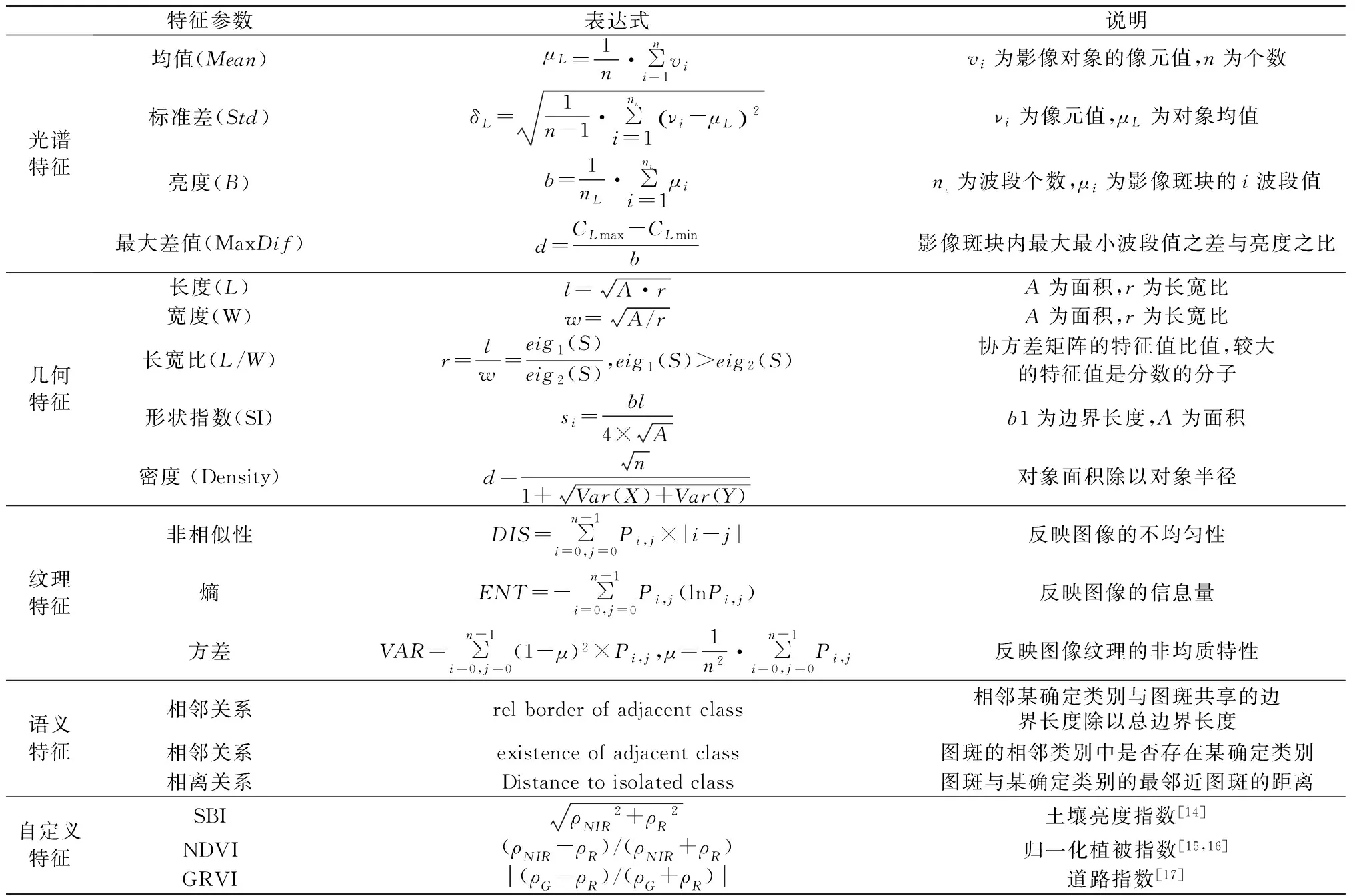
特征参数表达式说明光谱特征均值(Mean)μL=1n·∑ni=1vivi为影像对象的像元值,n为个数标准差(Std)δL=1n-1·∑nLi=1νi-μL()2νi为像元值,μL为对象均值亮度(B)b=1nL·∑nLi=1μinL为波段个数,μi为影像斑块的i波段值最大差值(MaxDif)d=CLmax-CLminb影像斑块内最大最小波段值之差与亮度之比几何特征纹理特征语义特征自定义特征长度(L)l=A·rA为面积,r为长宽比宽度(W)w=A/rA为面积,r为长宽比长宽比(L/W)r=lw=eig1(S)eig2(S),eig1(S)>eig2(S)协方差矩阵的特征值比值,较大的特征值是分数的分子形状指数(SI)si=bl4×Ab1为边界长度,A为面积密度(Density)d=n1+Var(X)+Var(Y)对象面积除以对象半径非相似性DIS=∑n-1i=0,j=0Pi,j×|i-j|反映图像的不均匀性熵ENT=-∑n-1i=0,j=0Pi,j(lnPi,j)反映图像的信息量方差VAR=∑n-1i=0,j=0(1-μ)2×Pi,j,μ=1n2·∑n-1i=0,j=0Pi,j反映图像纹理的非均质特性相邻关系relborderofadjacentclass相邻某确定类别与图斑共享的边界长度除以总边界长度相邻关系existenceofadjacentclass图斑的相邻类别中是否存在某确定类别相离关系Distancetoisolatedclass图斑与某确定类别的最邻近图斑的距离SBIρNIR2+ρR2土壤亮度指数[14]NDVI(ρNIR-ρR)/(ρNIR+ρR)归一化植被指数[15,16]GRVI(ρG-ρR)/(ρG+ρR)道路指数[17]

图3 归一化特征值散点图
Fig.3 The scatter plot of normalized eigenvalue

图4 初步提取流程
Fig.4 The flow chart of preliminary extraction
为保证道路提取的完整性,在对上述地物进行提取筛除时,进行较为严格的阈值选取以避免对道路错分类。生成待处理地物中的地物类型为水泥路、砾石路和建筑3种,但仍存在着面积较大的裸地区域以及水体、植被中尚未被提取出的部分。城镇建筑在影像上有着较强的亮度值,易与砾石路、植被等地物进行区分,但会与水泥路发生混淆。为保证道路提取的完整性,首先依据亮度值对高亮地物(主要以建筑与水泥路为主)与暗地物(以砾石路、植被、其他作物为主)进行区分;然后,采用语义特征与几何特征相结合的方法,依据道路与非道路地物的几何特征的差异性对亮地物与暗地物中道路进行循环提取。在选出初始道路的基础上,以这些道路为起始点,通过与道路之间的关联性向相邻的对象类寻找,直到找不到合适分类结果为止。进行道路提取时,人工阈值的选取往往会造成主观误差,降低道路提取精度,而采用适宜分类器进行处理则会较好地避免这种问题。本文采用支持向量机(SVM)分类器对地物进行道路提取,具体流程如图5。
根据亮度信息对待处理地物进行大类划分:呈亮地物主要为水泥材质构成的道路与建筑物,而呈暗地物中主要为砾石路及非道路地物。为对道路进行精确提取,对亮地物对象进行二次分割,并通过SVM分类器根据密度、长宽比、形状指数提取出初始道路;以初始道路作为种子点,根据对象形状特征向外进行自动道路拾取。但因为城镇中道路与建筑地物特征的相似性,当循环7次后,开始有建筑被误分为道路,此时应停止循环。暗地物中,根据亮度信息排除部分非道路地物,将剩余地物与呈亮地物中未分地物进行细分割并第二次进行初始道路选取。当地物中无法寻找出符合要求的道路,则拾取终止,进行道路合并并进行优化处理。
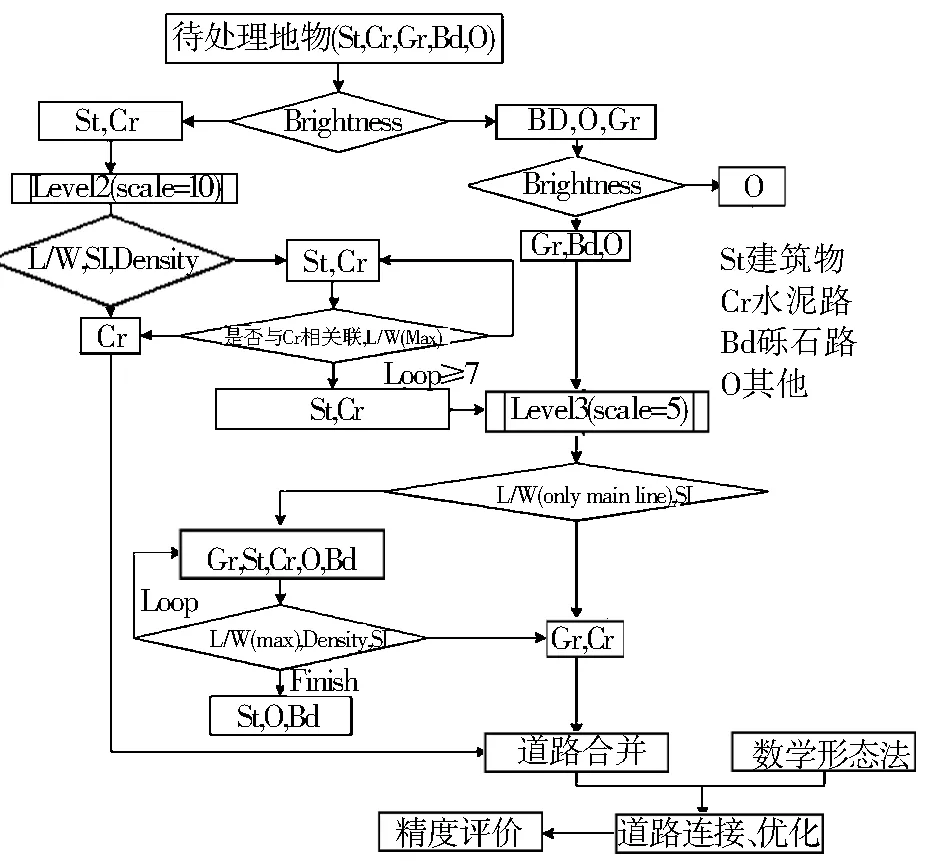
图5 道路信息提取流程
Fig.5 Flow chart of the extraction of road information
2.3 分类结果优化
由于地物特征的相似性造成的地物混分情况,以及道路不连贯、道路边缘平整等问题,需要对分类结果进一步优化。首先,对分类后道路类进行融合处理,然后采用参数排除错分并使得主干路基本显示。其次,针对道路不连贯、不规则问题,采用数学形态法进行处理[18]。
膨胀和腐蚀是两种最基本和最重要的变换或运算,也是其他变换或运算的基础。在以下公式中,A为待处理图像,B为结构元素。
(1)膨胀利用结构元素对影像的补集进行填充[19]。
(2)
(2)腐蚀是对一个图像进行探测,以便找出在图像内部可以放下该基元的区域。
(3)
本文中主要按照图6的生长方式,通过开运算将断线道路连接[20],并通过形态学闭运算改善地物内部出现孔洞以及细缝现象。通常经过数学形态法处理后,图像发生明显变化,最后的道路提取结果如图7所示(见封2)。
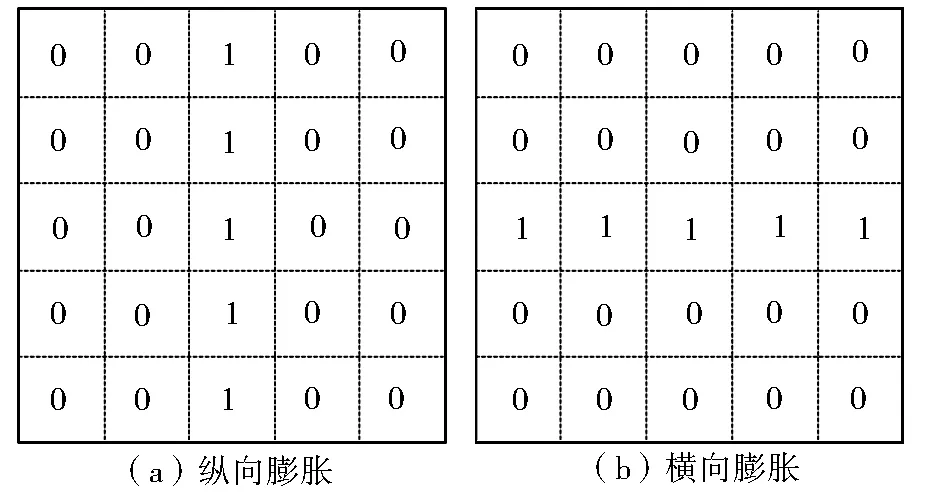
图6 变化方向
Fig.6 Direction of dilation
3 结果分析与讨论
从图7中可以看出,基于像元的道路提取结果中,砾石路与裸地等难以区分,水泥路与建筑物发生严重混淆。道路不完整、不连贯,错分、漏分较多,结果图中噪声多,“同物异谱”、“同谱异物”现象严重。在面向对象的提取结果中,从位置和方向上看,原始图像中主要道路都能被很好地提取出来。在经过形态学处理并且通过断点连接等优化措施后,取得了较好的结果。为对最后的道路提取结果进行定量分析,本文基于混淆矩阵对研究区道路进行精度评价[21],结合谷歌地球高分辨率影像以及实地调查数据和其他辅助数据,在图像上随机选取1 000个点作为检验数据进行精度评价(表2)。

表2 研究区道路精度评价Table 2 Accuracy assessment of road extraction using confusion matrix
由精度评价误差矩阵可知,水泥路与砾石路的提取结果中,生产精度分别达0.82与0.84,用户精度分别达0.80与0.85,同时基本保证了道路间的连续性和完整性,可证明本文道路提取方法的可行性。其中,水体与水泥路、砾石路之间都得到了很好的区分,植被与水泥路之间的区分度也较高,几乎不存在混分情况。但水泥路与建筑、砾石路与裸地、砾石路与植被三者之间存在着较为严重的错分、漏分情况,这主要是因为研究对象位于乡镇,地物光谱信息类似,地物复杂程度高,而道路所占像元较少且较为分散,易与其他地物混淆。此外,分割尺度的选择对道路提取也有着一定的影响,尺度选择不当使得毗邻大面积植被区域的砾石路部分混分到植被区中。
为验证本研究方法的可推广性,选取同一时相、同一传感器、相似地物类型的不同区域影像进行道路提取。选择2013年1月18日安徽省滁州市与蚌埠市交界处(117°32′~117°35′E,32°82′~32°85′N)的资源三号影像,实现从源影像到道路信息的提取,并保证分类精度,道路提取结果如图8所示(见封2)。
4 结论
本文主要借鉴了面向对象影像分析中的多尺度分割技术和模糊逻辑的分类方式,采用影像对象代替传统的像元,通过ESP方法选择最佳分割因子,使得分割结果接近于实际地物,保证道路对象的纯净度。通过选用光谱特征、纹理特征对研究区进行初步分类,对非道路地物进行逐一排除,并利用道路的几何特征、语义特征,采用支持向量机的分类方法自动对道路进行循环提取,主要是通过确定初始道路对象并将其作为种子点按照设定条件自动向外进行道路的对象级拾取。最后,引入数学形态法进行面向对象的道路类断点连接以及边缘优化,在保证道路连接的前提下进行基于膨胀和腐蚀的开运算和闭运算,使得道路边界具有平整性。
该提取流程尚存在有待完善的地方,如因为分割尺度的问题而导致的道路错分与漏分、道路自动提取时的误判情况等。如果能够更广泛地利用其他特征辅助道路提取,可能会进一步提高道路提取精度,这是今后需继续研究的内容。
[1] 吴亮,胡云安.遥感图像自动道路提取方法综述[J].自动化学报,2010,36(7):921-922.
[2] 蔡红玥,姚国清.基于分水岭算法的高分遥感图像道路提取优化方法[J].国土资源遥感,2013,25(3):25-29.
[3] QIU X M,WU S S,MIAO X.Incorporating road and parcel data for object-based classification of detailed urban covers from NAIP images[J].Giscience & Remote Sensing,2014,51(5):498-520.
[4] OUYANG Z T,ZHANG M Q,XIE X,et al.A comparison of pixel-based and object-oriented approaches to VHR imagery for mapping saltmarsh plants[J].Ecological Information,2011,6(2):136-146.
[5] VOLTERSEN M,BERGER C,HESE S,et al.Object-based land cover mapping and comprehensive feature calculation for an automated derivation of urban structure types at block level[J].Remote Sensing of Environment,2014,154:192-201.
[6] LI X X,SHAO G F.Object-based land-cover mapping with high resolution aerial photography at a county scale in Midwestern USA[J].Remote Sensing,2014(6):11372-11390.
[7] 何勇,陈昌鸣.基于eCongnition的面向对象农村公路提取[J].重庆交通大学学报(自然科学版),2012,32,(6):1194-1197.
[8] 孙晓霞,张继贤,刘正军.利用面向对象的分类方法从IKONOS全色影像中提取河流和道路[J].测绘科学,2006,31(1):62-63.
[9] 雷小奇,王卫星,赖均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009,38(5):457-464.
[10] 国家测绘地理信息局卫星测绘应用中心.Zy-3资源三号测绘卫星用户指南[S].2012.
[11] DEFINIENTS IMAGE GMBH.eCognition User Guide[S].Germany,2004.
[12] BAATZ M,BENZ U,DEHGHANI S.eCognition Developer 8.0.1-User Guide[S].Germany:Trimble,2010.
[13] 黄亮,左小清,冯冲.基于Canny算法的面向对象影像分割[J].国土资源遥感,2011(4):26-30.
[14] KAUTH R J,THOMAS G S.The tasseled cap——a graphic description of the spectral-temporal development of agriculture crops as seen by Landsat[A].Pros Symposium on Machine Processing of Remotely Sensed Data[C].Purdure University,West Lafayette,Indiana,1976.41-51.
[15] ROUSE J J W,HAS R H,SCHELL J A,et al.Monitoring vegetation systems in the Great Plains with ERTS[J].NASA Special Publication,1974,3,309-351.
[16] DEERING D W ,ROUSE J W.Measuring′forage production′of grazing units from Landsat MSS data[A].Internation Symposion on Remote Sensing of Environment[C].2002,83(1):195-213.
[17] SINGH S M.Simulation of solar zenith angle effect on global vegetation index(GRVI)data[J].International Journal of Remote Sensing,1988,9(2):237-248.
[18] 崔屹.图象处理与分析——数学形态学方法及应用[M].北京:科学出版社,2000.
[19] 潘建平,邬明权.基于数学形态学的道路提取[J].计算机工程与应用,2008,44(11):232-240.
[20] 安如,冯学智,王慧麟.基于数学形态学的道路遥感影像特征提取及网络分析[J].中国图象图形学报,2003(7):798-804.
[21] CONGALTON R G.A review of assessing the accuracy of classifications of remotely sensed data[J].Remote Sensing of Environment,1991,37(1):35-46.
Research on Extraction of Road Based on Object Oriented in an Urban Context
LIN Peng1,RUAN Ren-zong1,WANG Yu-qiang2,TAO Ting1
(1.School of Earth Sciences and Engineering,Hohai University,Nanjing 210098;2.Shandong Province Disaster Reduction Center,Jinan 250012,China)
Roads is characterized by rapid update in an urban context.This makes it significant that the information on road is extracted quickly and precisely.The roads in urban areas are characterized as being complex,various and sometimes narrow.This makes it difficult to extract road features in an urban context due to the existence of a large number of mixture pixels.In this paper,a part of Chuzhou,Anhui is taken as test area and Ziyuan 3 imagery is used to explore the effective method of road extraction in an urban context.Based on object-oriented image analysis,multiple features are fed into support vector machine for the extraction of roads in an urban context.These features include spectral features,shape feature and other features.Finally,the results are processed by using morphology method.The research shows that the proposed method is effective and road extraction results are satisfying.
road;object-oriented;rule-based;loop extraction;mathematical morphology
2015-03-20;
2015-11-16
中国科学院战略性先导科技专项(XDA05050106);生态十年专项(STSN-01-05)
林鹏(1992-),男,硕士研究生,主要从事城市遥感与GIS应用研究。E-mail:1093539758@qq.com
10.3969/j.issn.1672-0504.2016.01.010
TP75
A
1672-0504(2016)01-0049-06