模糊控制在垂直发射导弹滚转回路中的应用
2016-05-23宁方清陈中祥江南机电设计研究所五室563000
王 刚,宁方清,陈中祥(江南机电设计研究所五室,563000)
模糊控制在垂直发射导弹滚转回路中的应用
王 刚,宁方清,陈中祥
(江南机电设计研究所五室,563000)
摘要:针对导弹在垂直发射过程中燃气舵复杂及非线性的特点,设计了一种模糊PID控制器控制三回路,该控制器将工作人员的经验结合其中,利用模糊控制理论能够在线实时整定PID参数,克服了传统PID控制器的一些缺点,通过Simulink仿真表明,该控制器可使性能得到明显改善。证明了该方法的有效性。
关键词:模糊控制;模糊PID控制
0 引言
传统的固定PID参数在三回路调整中,如果调整时间短,则超调非常大(由于实际陀螺测量范围有限制因此不适合),如果超调小则,则调整时间长(必须和I,II回路一起调整,容易引起耦合),在实际应用中由于角速度最大值和时间都有限制,因此需要改进方法以满足实际的控制需要。
垂直发射导弹在垂直发射过程中姿态发生很大的变化。在传统的转弯方法中有先转滚转,再进行姿态变化,也有直接进行姿态转换。采用先进行滚转,可以减少后面姿态调整的耦合(前提是滚转角大于90度的情况下,如果滚转角小于90度则就不需要本文的控制方法),本文以快速滚转的三回路为研究对象用模糊PID进行整定,并进行仿真验证,证明在不确定条件下,并且角速度最大值有限制,模糊控制具有快速性等特点。
模糊控制器是近年来发展起来的新型控制器,其特点是不要求掌握受控对象的精确数学模型,而根据经验以及控制系统的实际响应情况,运用模糊推理的方法,自动实现对PID参数的最佳调整。
1 模糊自适应PID控制器的设计
1.1 模糊自适应PID控制器的原理
模糊自适应PID控制器是应用模糊数学的基础理论和方法,把控制规则的条件、操作用模糊集来表示,根据控制系统的实际情况(系统的输入、输出),运用模糊推理,实现对PID参数的自动调整。
1.2 模糊自适应PID控制器的控制结构
PID控制器的控制算法为:

u(t)为控制器输出量,e(t)为误差信号,分别为比例系数、积分系数、微分系数。输入参数是e(t),输出参数是在运行中不断检测E再根据模糊规则进行模糊推理,对进行在线调整。
1.3 PID参数自整定方法
本系统采用不依赖受控对象的精确数学模型,而是根据人工控制规则组织控制决策表,决定控制量的大小,从系统的响应速度、超调量来考虑的作用如下:
比例控制作用:系统误差一旦产生,控制器立即就有控制作用,使被PID控制的对象朝着减小误差的方向变化,控制作用的强弱取诀于比例系数过大会导致系统超调增大,使系统的动态性能变坏。
积分控制作用是能对误差进行积分以消除系统的静差。不足之处在于积分作用具有滞后特性,积分作用太强会使被控对象的动态品质变坏。
微分控制作用是抑制被控量变化能力,即可以使超调减小。
1.4 控制规则确定
模糊控制器输入、输出变量都是精确量,模糊推理是针对模糊量进行的。因此,控制器首先对输入量进行模糊化处理。在本文设计的模糊PID控制器中,输入、输出的语言值均为7个语言值:NB、NM、NS、ZO、PS、PM、PB,隶属度函数采用类三角函数。
1.6 量化因子和比例因子
输入量根据实际的物理意义将最大值乘以一定的比例系数转换成模糊控制量的论域里。
1.7 模糊推理及解模糊化
本设计采用Mamdani方法进行推理。解模糊的方法采用重心法。
2 仿真试验
充分利用发动机点火后0s~0.5s,而现在的方案是不用这个时间段推力。因此充分利用此时间段推力,减少后面转弯的压力以及气动耦合。

图1 滚转角
试验是在XX型号的基础上加上燃气舵数据进行三回路控制,I回路和II回路不控。
模糊控制工作在0s~0.5s,以后进行平滑转入到传统的三回路设计(两种控制方式的切换采用加权方法)。经过高低温、燃气舵拉偏检验,角速度均没有超过最大值250°/s。最大舵偏角速度都限制到了350°/s。以滚转角偏转90度为例。滚转角、滚转角速度、舵偏角速度具体曲线见图2。

图8 舵舵偏角速度
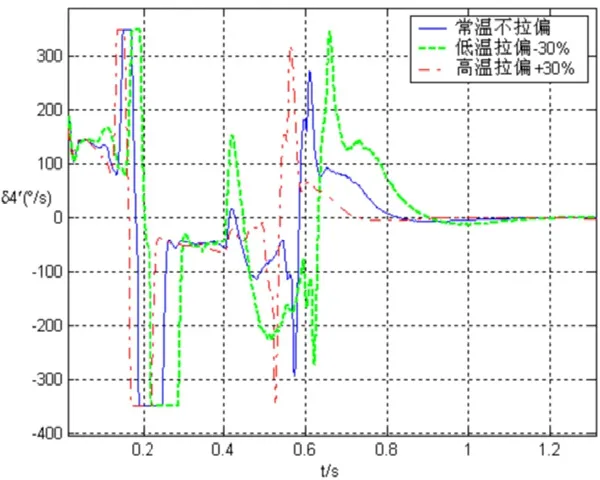
图9 舵舵偏角速度
3 结论
本文研究了模糊控制在导弹三回路控制中的应用,该方法抑制了超调并缩短调节时间,经过仿真验证,验证了此方法的有效性和可行性。
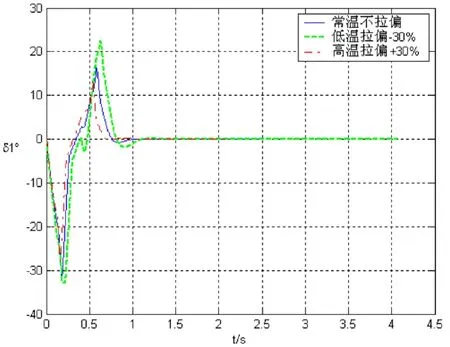
图2 舵舵偏角

图3 舵舵偏角

图4 舵舵偏角

图5 舵舵偏角
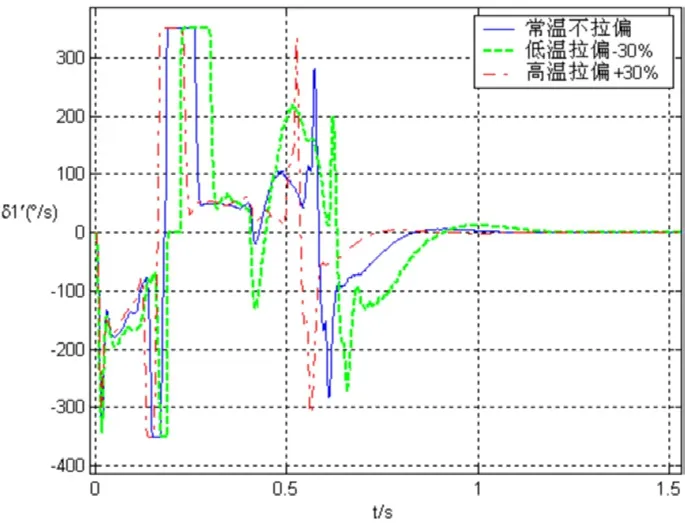
图6 舵舵偏角速度

图7 舵舵偏角速度
The application of fuzzy control in the vertical roll loop of missile
Wang Gang,Ning Fangqing,Chen Zhongxiang
(Jiangnan Institute of mechanical and electrical design five,563000)
Abstract:According to the characteristics of missile vertical launching of gas rudder complex and nonlinear design a fuzzy PID controller to control the three loop,the controller will staff experience with them,by using fuzzy control theory to online real-time tuning PID parameters, overcome some of the shortcomings of traditional PID controller,by Simulink simulation showed that, the controller can make performance has been significantly improved.The validity of the method is proved.
Keywords:fuzzy control;fuzzy PID control
