Numerical and Experimental Investigation of the Problem of Diving Difficulty of Autonomous Underwater Vehicle
2016-05-16
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
Numerical and Experimental Investigation of the Problem of Diving Difficulty of Autonomous Underwater Vehicle
ZHANG Hong-wei,LI Jin-cui,WANG Yan-hui,WANG Shu-xin,HAO Liang
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
When an Autonomous Underwater Vehicle dives near free surface,it is influenced by upward suction force,as a function of Venturi effect,which makes it difficult for the underwater vehicle to dive and maintain a constant depth.In order to research the above problem,this paper simulates the flow field around the bare hull of an Autonomous Underwater Vehicle(AUV)near free surface,using Computational Fluid Dynamic(CFD)tools.Simulation result shows that the main factors affecting lift and nose up pitch moment acting on the vehicle are initial diving depth and velocity. Field test shows that the vehicle dives more easily with the initial diving depth increases,which is consistent with numerical simulation.
diving difficulty;Venturi effect;free surface;autonomous underwater vehicle; CFD
0 Introduction
In field test and practical application of streamlined autonomous underwater vehicle,the difficulty in diving near free surface is a common occurrence problem puzzling the developers. Experiment shows that whether changing rudder angle or increasing rotate speed of propeller can hardly make underwater vehicle diving easier,even if the underwater vehicle has a high maneuverability in deep water.So the theory of maneuverability can not explain this problem. Generally,the underwater vehicle is trimmed to be positive buoyancy.Reducing positive buoyancy value will make it easier to dive,but the effect is not obvious.Besides,too small positive buoyancy results in difficulty for field operation.So explaining this problem and putting forward solution will contribute to the design,application and popularization of AUV.Based on the above purpose,this paper simulates the flow field of an AUV.
The research on the numerical simulation of the flow field of underwater vehicle has been widely carried out.Ettore et al[1]compared CFD and analytical and semiempirical(ASE)methods applied to the prediction of the normal force and moment coefficients of an AUV.The CFD approach allows for a good prediction of the coefficients after validation through experiments in a towing tank.Bystrom[2]measured the normal force and pitch moment acting on the submarine model when it passed seabed level in different distances to the seabed and different velocities,using captive model,and analyzed the influence of the seabed on maneuverability.Wu et al[3]researched the hydrodynamic characteristics of DARPA Suboff model near seabed by numerical simulation.As to the investigation of free surface effect,Xiong and Wu[4]used rankine sources to study the effect of free surface and bank on the ship hydrodynamic forces in restricted water.In condition of bank existing,the existing of free surface will increase cross force.Ali et al[5]studied the interaction of an axisymmetric underwater vehicle and free surface.Yang[6]applied Reynolds averaged Navier-Stokes(RANS)equation to the numerical simulation of the flow around submarine near free surface,and the free surface waveform was obtained.Sun et al[7],Feng[8]and Han et al[9]computed wave forces for a submarine near free surface.Zhang et al[10-12]simulated the flow around submarine operating near surface and the simulation results showed that the free surface has a great influence on waveform and drag. Hong[13]simulated the flow around a square cylinder near free surface by improving the method of VOF.The distance between free surface and square cylinder is the main factor affecting free surface.Autonomous underwater vehicles operating near the sea surface are subjected to wave disturbances in their motion.So a controller structure for compensating the wave disturbances in the vertical plane for a torpedo-like autonomous underwater vehicle has been designed[14]. Researches on free surface effect concerning hydrofoil also have been conducted[15-16].Saout et al[17]used a theoretical methodology to determine the open-loop directional stability of a nearsurface underwater vehicle.Result showed that the presence of the free surface suppresses unsteady velocity oscillations through radiation damping.
Previous studies concerning underwater vehicle in restricted water focus on bank effect[18]and free surface effect in theoretical aspect.Most of studies in free surface effect are concentrated on waveform,wave resistance and hydrodynamic forces.As far as we know,few give a special study on the problem of difficulty in diving,which is a common problem in research and development of AUV.And it is generally believed that the partially exposed propeller above the water surface when diving is the root cause.In order to explain the problem of difficulty in diving near free surface,this paper simulates the flow field of the bare hull of an AUV developed by Tianjin University at different submergence depths and Froude numbers.The solver adopted in CFD simulation is Fluent,using VOF model which is frequently used in previous researches.The generation mechanism of Venturi effect and its main factor are presented in this paper.Result shows that Venturi effect is the root cause of this problem.From 2011 to 2014, a large number of field tests are conducted and verify this conclusion.
1 Numerical simulation
In order to study the problem of diving difficulty for an AUV near free surface,the flowfield of the bare hull at different submergence depths and velocities is simulated.Fig.1 illustrates the schematic diagram of the motion near free surface,where H is the vertical distance from the surface of water to the upper surface of the main body.
1.1 Computational domain
The computational domain has a great impact on Fluent simulation authenticity as well as the accuracy of the result.In order to research the motion of the vehicle near free surface,the computational domain covers two parts(see Fig.2).The upper fluid is air while the lower is water.
According to the concept of unbounded flow field and the need of computation,cuboid computational domain is selected,as is depicted in Fig.2. The height Y=16D,the width Z=16D,where D is the diameter of the vehicle,D=0.8m.X1=3D,X2=6D,where X1is the axial distance from the vehicle fore-end to fluid entrance,X2is the axial distance from the vehicle rear-end to fluid exit.The origin of coordinates locates above the center of gravity.Vertical distance is H+D/2. The initial position of the water surface is z=0.
1.2 Boundary conditions and flow field parameters
As shown in Fig.2,considering the effect of free surface,the entrance is divided into two parts,air entrance and water entrance.Set them as velocity-inlet and the velocity is the vehicle’s actual velocity.The calculation velocities are 0.5 m/s,1.0 m/s,1.5 m/s and 2.0 m/s.According to the Ref.[7],choose k-ε turbulence model as the computational model.The air and water inflow velocities are consistent.
This paper mainly analyzes the flow field and hydrodynamic performances of AUV near free surface.Select the center of gravity as the observation point of lift,drag and pitch moment acting on the hull.Take the variations of force and moment as one of the convergence conditions.The other convergence condition is whether fluid flow rate accords with the law of mass conservation.
1.3 Verification of calculation method
In order to verify the reliability of VOF model applied to the simulation of underwater vehicle near free surface,the simulation drag coefficientis compared to the theoretical valueof an ellipsoid with length L=2 m,diameter D=0.2L,submergence depth h/D=0.8,where his the vertical distance from free surface to the symmetric axis of the ellipsoid.The result is shown in Tab.1,where the theoretical value of wave resistance coefficient Cwcites the Ref.[9], frictional resistance coefficient Cfis calculated as:

Fig.2 Sketch map of computational domain

where Rerepresents Reynolds number.Viscous pressure resistance coefficient is calculated as

where Amis the area of midship section area,S is the wetted surface area,Lris the length of the submarine’s tail cone.
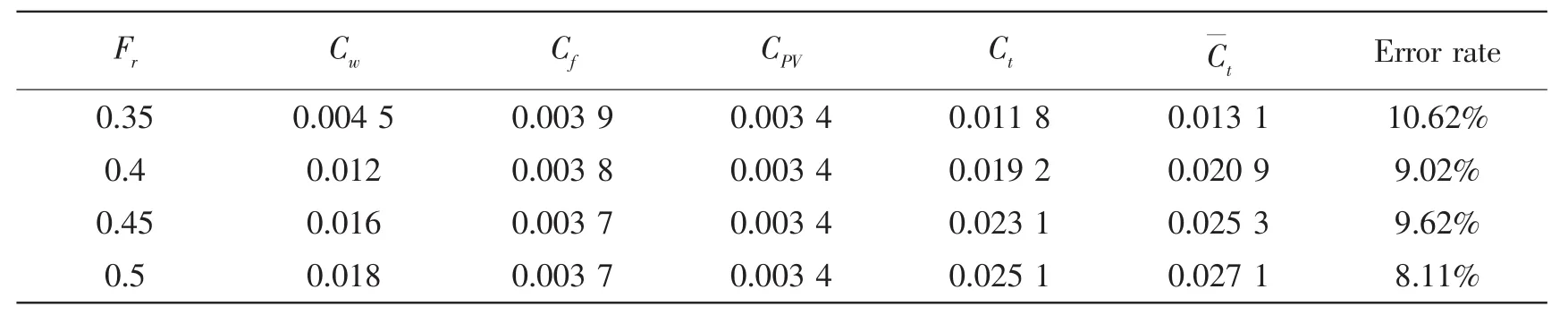
Tab.1 Comparison of the drag coefficient gained by theoretical calculation with numerical simulation
As is shown in Tab.1,the error rate between the numerical simulation value and theoretical calculation value is in 10%.And the simulation result can meet the precision requirement.
2 Simulation result and analysis
2.1 Free Surface deformation
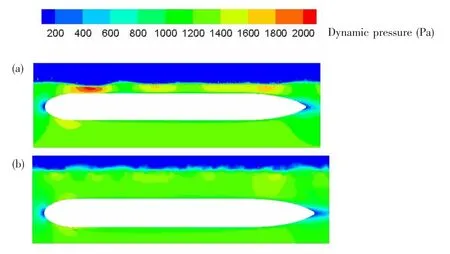
Fig.3 Dynamic pressure in symmetry plane at(a)H/D=0.5 and(b)H/D=1
Fig.3 illustrates the dynamic pressure around AUV at different depths in the conditionthat Froude numberis 0.17,Reynolds numberThree groups of data(H/ D=0.5,1,2)were simulated and two of them are illustrated here.The wave making effect is prominent and mainly accumulates in the front part of the hull when it navigates near surface. And the maximum amplitude of the crest decreases sharply with the increase of H/D.When H/D=2,the wave making effect disappears.
2.2 Fluid dynamic pressure around AUV
When the hull navigates near surface,the flow around the upper surface can not spread freely due to the restriction of the free surface,as illustrated in Fig.3(a).According to the fluid continuity equation,the flow velocity and the dynamic pressure along the length of the hull will increase as a result of the constraint of the streamlined hull.The maximum of the flow rate and dynamic pressure locate at the connection area of the nose and the cylindrical hull.
According to the Bernoulli’s equation,larger flow rate results in smaller static pressure and lower liquid level.So,the liquid level drops obviously at the connection area of the nose and the cylindrical hull where the magnitude of flow rate reaches maximum.Simultaneously, the surface wave making is created.The wave making will make the hull fluctuate.After the nose section,the flow velocity around the cylindrical hull decreases due to the resistance of the viscosity force.Thus,wave making process can not be exited obviously any more.
The water around the lower surface of the hull is not affected by free surface.So the fluid velocity and dynamic pressure along the length of the hull increase slightly.As the submergence depth increases,the free surface effect on the hull decreases sharply,as illustrated in Fig.3(b).
2.3 Pitch moment,lift and drag force versus depth
Fig.4 shows the lift at different submergence depths.The positive value of the force means vertically upward.The pressure acting on the hull surface is composed of static pressure and the dynamic pressure components perpendicular to the hull surface.The dynamic pressure component is very small because the fluid velocity is almost perpendicular to the surface,and it can be neglected.Hence,the pressure acting on the hull surface almost equals to static pressure.
By the above analysis of Fig.3,there is an obvious difference of fluid velocity and static pressure between the upper and lower surface of the hull,especially in the front part of the hull.The difference results in obvious lift and nose up pitch moment by what is referred to as Venturi effect.As the submergence depth increases,the lift decreases sharply.
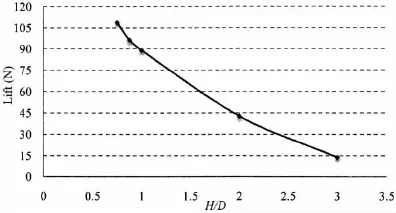
Fig.4 Lift at different submergence depths

Fig.5 Pitch moment at different submergence depths
For the streamlined underwater vehicle,the location of the hydrodynamic center is in front of the buoyance center along the vehicle.So nose up pitch moment is produced while the lift is produced.Fig.5 illustrates the pitch moment versus submergence depth.The trend of changes with the depth in pitch moment acting on the hull is similar to the lift.Because the action point of hydrodynamic force is in front of the center of gravity,the lift provides nose up pitch moment.Especially,when the AUV navigates near free surface,the nose up moment acting on the hull is relatively larger and the hull’s head is raised.Besides,the hull fluctuates due to the wave making.And this makes the dive more difficult.Thus,Venturi effect is an obstacle for initial dive.So in most cases,AUVs are trimmed to be nose down attitude.With the submergence depth increases,the pitch moment acting on the hull experiences a severe reduction process.When the initial submergence depth is three times the diameter of the hull,the influence of pitch moment on diving could be neglected.
Fig.6 shows the drag versus submergence depth.The total drag is composed of friction drag and residual resistance which contains viscous pressure resistance and wave resistance.The total drag increases as the submergence depth decreases.
Inspection of Fig.6 reveals that the friction drag is almost unchanged with submergence depth.The friction drag is generated by frictional shear stress in the boundary layer.The frictional shear stress is calculated as
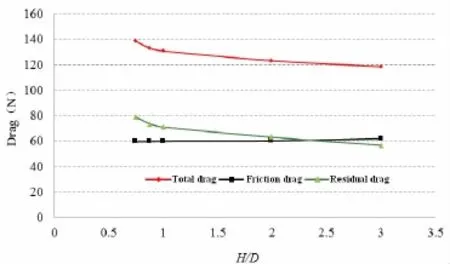
Fig.6 Drag at different submergence depths

where μ is liquid kinetic viscosity coefficient,is velocity gradient of the boundary layer. The thickness of boundary layer depends on Reynolds number.In the simulation,the Reynolds number maintains a constant as the submergence depth changes,so that the thickness of boundary layer remains the same.Consequently velocity gradientremains unchanged as well as the frictional shear stress.So the friction drag almost remains the same.
The viscous pressure resistance is in relation to configuration and velocity of the hull[19].According to the Reynolds law,viscous pressure resistance coefficient only depends on Reynolds number for certain shaped objects.So the viscous pressure resistance does not change while the submergence depth changes.On the other hand,the wave resistance ascends as the submergence depth decreases.As a result,residual resistance increases with the submergence depth decreasing as well as the total drag.
However,for a certain propulsion power,the increase of the drag near free surface results in the slight decrease of velocity of the vehicle.Thus,the operating efficiency of the rudder and the maneuverability of the vehicle will decrease.So the increase of the drag near free surface is one of the secondary causes of the problem of diving difficulty.
2.4 Lift and pitch moment versus Froude number
Fig.7 indicates that the lift and pitch moment obviously ascend with Froude number increasing(H/D=1).For a certain hull,Froude number mainly relies on velocity.With the velocity increase,the fluid on the upper surface of the hull accelerates more quickly,which causes the lift and pitch moment increase obviously.

Fig.7 Lift(a)and pitch moment(b)at different Froude numbers
3 Field test
Related field test of AUV developed by Tianjin University was conducted in South China Sea in early June 2014(see Fig.8 and Fig.9).
Before the test,the main body of the AUV is trimmed to be below the water surface.While in the navigation process,a part of the back of the main body will rise above water surface under the action of lift and wave making is created(see Fig.8(a)).There is an obvious trough of wave locates at the connection area of the nose and the cylindrical hull,which is highly consistent with the simulation result.
The task of one test(Fig.9)was set as follows:the AUV navigates straight in the first 150 seconds and then the elevator angle is set at-12°to start diving mode.Test conditions are as below:
(1)The vehicle oscillates irregularly with very small amplitude in the period of straight navigation.Once diving mode begins,the AUV dives quickly when H equals 0.6 m.The Venturi effect almost has no effect on it.
(2)When H equals 0.4 m,0.2 m,and 0.1 m,respectively,the upper surface of the vehicle comes up to the water surface discontinuously in the period of straight navigation.According to the test data,there exists periodical oscillation with relatively large amplitude,which means that the Venturi effect is more significant than in the condition of 0.6 m.And the time used to dive is longer.
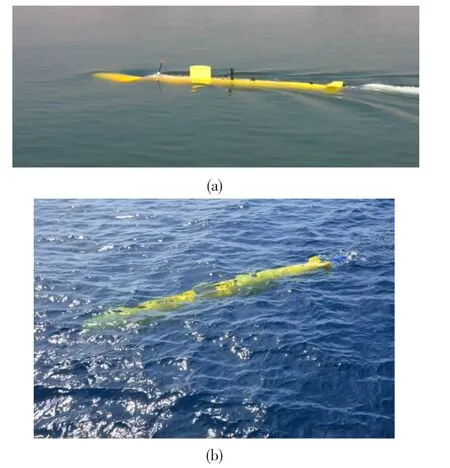
Fig.8 Field test in South China Sea(a)The AUV navigating on the water surface; (b)The initial dive of the AUV
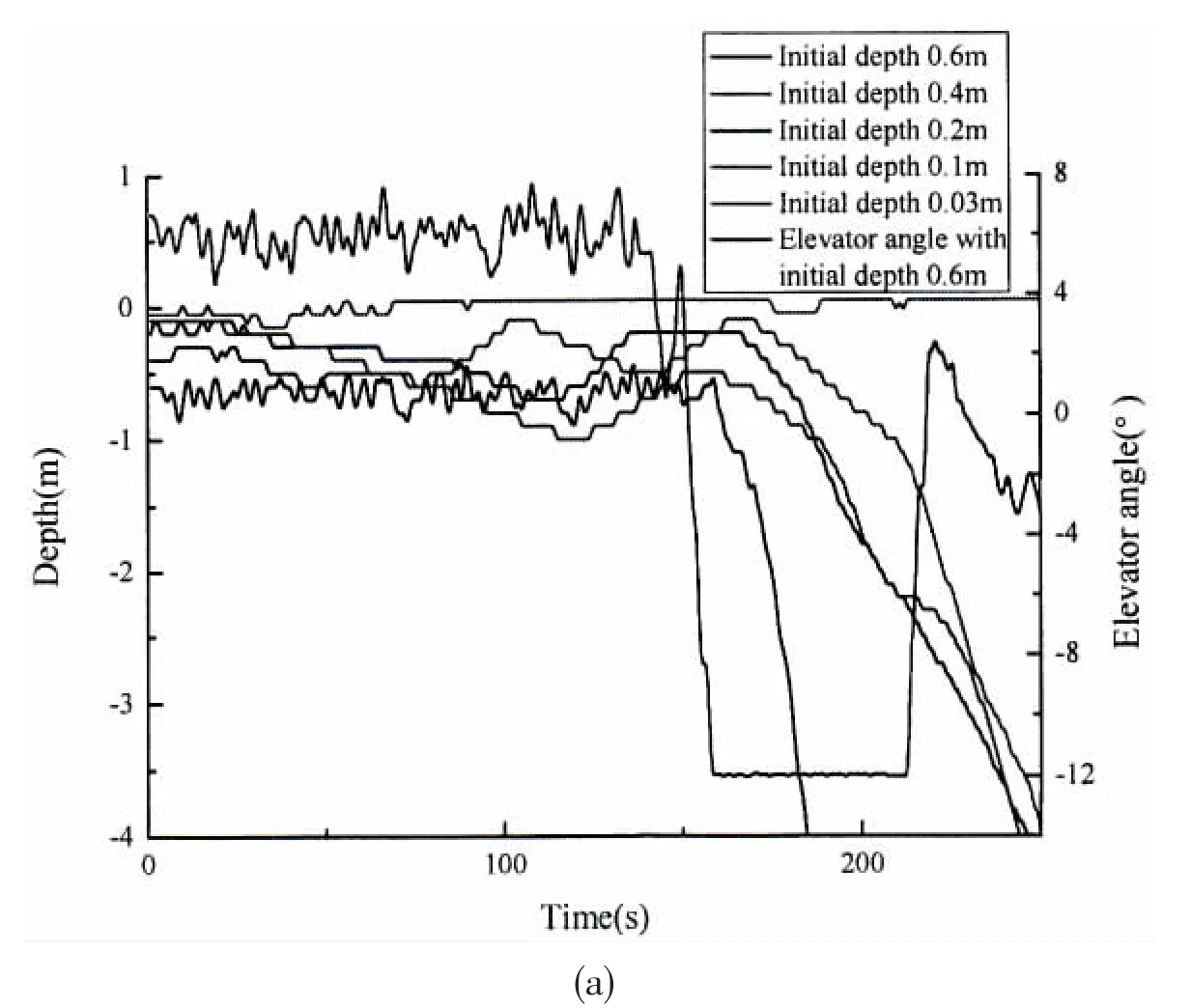
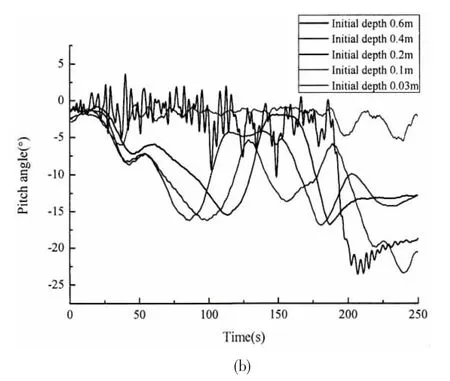
Fig.9 Diving from different initial depths(a)Depth and elevator angle VS time;(b)Pitch angle VS time
(3)When H equals 0.03 m,the upper surface of the vehicle is lift out of the water under the action of the Venturi effect and navigates at an almost constant pitch angle in the period of straight navigation.After the pitch angle is set at-12°,the vehicle can not be fully immersed in water to dive under the influence of the suction force.At this time,the operator attempts to set the pitch angle at its limit value to dive.However,this approach only results in the increase of pitch angle.And the vehicle still can not dive.Besides,the partial even overall propeller will be lift out of the water surface.Thus,the thrust force is sharply reduced as well as the velocity,which makes diving more difficult.At this circumstance,the vehicle will maintain semi-submersible state.But in such case,the wireless antenna will be immersed under water and wireless communication is interrupted.The acoustics communication also fails due to the semi-submersible state.So this state is very unfavorable.
From the test result,we can draw the following conclusions:(1)As the value of H decreases,the Venturi effect gets more significant and the vehicle dives more difficultly.When H is smaller than 0.03 m,the AUV can not dive even though the pitch angle is very large;(2) Though the partly exposed propeller leads to the decrease of velocity and hydrodynamics,it is not the root cause of diving difficulty.It is a result of Venturi effect.The test result is consistent with the numerical result.
4 Conclusions
This paper researches the problem of diving difficulty near surface of Autonomous Underwater Vehicle by simulating the navigation of the bare hull using CFD software.Related test also has been conducted.According to the simulation and test results,conclusions are drawn as follows:
(1)When an underwater vehicle navigates near surface,the pressure difference between the upper and the lower side of the vehicle leads to the problem of diving difficulty.
(2)The lift,pitch moment and drag acting on the hull decrease as the submergence depth increases.The lift and pitch moment increase as the Froude number increases.So the main factors for theVenturi effect are initial diving depth and velocity.
(3)According to the field test result,the autonomous underwater vehicle researched in this paper can hardly dive if H is smaller than 0.03 m.The result has an important guiding value for the trim in future tests.
All in all,the lift and nose up moment produced by Venturi effect are the main reasons for the difficulty of diving near water surface,rather than weather and waves.To solve this problem,the critical value H to dive for a certain vehicle should be obtained.Thus,trimming properly in water can make diving easier.
[1]Ettore D B,João D D,António P,et al.Investigation of normal force and moment coeficients for an AUV at nonlinear angle of attack and sideslip range[J].IEEE Journal of Oceanic Engineering,2008,33:538-549.
[2]Byström L,Andersson R.Submarine maneuvering with a small bottom clearance[C].Warship-International Symposium then Conference Royal Institution of Navalarchitects,1996:21-21.
[3]Wu B S,Xing F,Kuang X F,et al.Investigation of hydrodynamic characteristics of submarine moving close to the sea bottom with CFD method[J].Journal of Ship Mechanics,2005,9(3):19-28.
[4]Xiong X M,Wu X H.A study on the effect of surface and bank on hydrodynamic maneuvering forces acting on ship hulls in restricted water[J].Shipbuilding of China,1994,124:34-43.
[5]Ali N,Abdolrahman D,Mazyar D.An axisymmetric underwater vehicle-free surface interaction:A numerical study[J].O-cean Engineering,2015,96:205-214.
[6]Yang C,Lohner R.Prediction of flows over an axisymmetric body with appendages[C]//The 8th International Conference on Numerical Ship Hydrodynamics.Busan,Korea,2003.
[7]Sun B Q,Miao Q M,Feng X Z,et al.A numerical method for the calculation of the wave forces acting on a submarine travelling near the free surface[J].Journal of Ship Mechanics,1997,1(1):21-26.
[8]Feng X Z,Jiang Q Q,Miao Q M,et al.Computation of motion and wave forces for a submarine running near free surface in different depth of immersion and direction[J].Journal of Ship Mechanics,2002,6(2):1-14.
[9]Han D F,Huang D B.Numerical prediction and convergence analysis of wave resistance for submerged body near free surface[J].Journal of Ship Mechanics,2005,9(1):29-35.
[10]Zhang N,Sheng H C,Yao H Z.Numerical simulation of flow around submarine operating close to the bottom or near free surface[J].Journal of Ship Mechanics,2007,11(4):498-507.
[11]Zhang N,Ying L M,Yao Huizhi,et al.Numerical simulation of free surface viscous flow around submarine[J].Journal of Ship Mechanics,2005,9(3):29-39.
[12]Zhang N,Zhang S L.Numerical simulation of hull/propeller interaction of submarine in submergence and near free surface[J].Journal of Hydrodynamics,2014,26:50-56.
[13]Hong F W.Numerical and experimental study of a body moving near free surface[D].Wuxi:China Ship Scientific Research Center,2001.
[14]João D,Jose D C,Ettore D B.Study of autonomous underwater vehicle wave disturbance rejection in the diving plane[J]. Proceedings of the Institution of Mechanical Engineers Part M-Journal of Engineering for the Maritime Environment, 2014,228:122-135.
[15]Mashud M D,Bijoy P,Nasif R.Numerical simulation of free surface water wave for the flow around NACA 0015 hydrofoil using the volume of fluid(VOF)method[J].Ocean Engineering,2014,78:89-94.
[16]Filippas E S,Belibassakis K A.Hydrodynamic analysis of flapping-foil thrusters operating beneath the free surface and in waves[J].Engineering Analysis with Boundary Elements,2014,41:47-59.
[17]Saout O,Ananthakrishnan P.Hydrodynamic and dynamic analysis to determine the directional stability of an underwater vehicle near a free surface[J].Applied Ocean Research,2011,33:158-167.
[18]Yao J X.Numerical study on bank effects for a ship sailing along bank[D].Shanghai:Shanghai Jiao Tong University, 2010.
[19]Sheng Z B,Liu Y Z.Principle of Ship(volume1)[M].4th ed.Shanghai:Shanghai Jiao Tong University Press,2004:163.
自主水下机器人下潜困难问题的数值仿真与试验研究
张宏伟,李金翠,王延辉,王树新,郝 亮
(天津大学 机械工程学院,天津 300072)
自主水下机器人在近水面运动时,受到文丘里效应产生向上吸力的影响,使得潜器初始下潜困难,近水面的深度保持能力也受到影响。为了研究水下潜器近水面下潜困难问题,文章运用计算流体力学(CFD)软件对某AUV主体周围流场进行近水面数值模拟。模拟结果表明,影响升力和抬头力矩的主要因素是初始的下潜深度和速度。水域试验表明随着初始下潜深度的增加,AUV的下潜将变得越来越容易,这与模拟结果相一致。
下潜困难;文丘里效应;近水面;自主水下机器人;CFD
U661.3
:A
张宏伟(1976-),男,天津大学机械工程学院副教授;
U661.3
A
10.3969/j.issn.1007-7294.2016.03.005
1007-7294(2016)03-0277-11
李金翠(1989-),女,天津大学机械工程学院硕士研究生;
王延辉(1979-),男,天津大学机械工程学院副教授;
王树新(1966-),男,天津大学机械工程学院教授;
郝 亮(1989-),男,天津大学机械工程学院硕士研究生。
Received date:2015-11-29
Foundation item:Supported by the Dynamical Behaviors and Control of the Propeller Driven Hybrid Underwater Glider with Controllable Wings(Grant no.51475319)and by the National Hi-tech Research and Development of China(Grant no.2012AA091001)
Biography:ZHANG Hong-wei(1976-),male,associate professor of Tianjin University,E-mail:zhanghongwei@tju.edu.cn;
LI Jin-cui(1989-):female,master student of Tianjin University,E-mail:cuijinl1019@163.com;
WANG Yan-hui(1979-):male,associate professor of Tianjin University,E-mail:yanhuiwang@tju.edu.cn.
猜你喜欢
杂志排行
船舶力学的其它文章
- Load-Compression Relationships of Bonded Rubber Ring
- Three Dimension Electromagnetic-Thermal-Mechanical Coupling Finite Element Model for High Frequency Induction Mobile Heating Formation of Steel Plate
- Fatigue Reliability Analysis for the Manned Cabin of Deep Manned Submersibles Based on the Unified Fatigue Life Prediction Method
- An Engineering Method to Predict Fatigue Crack Propagation Life for Marine Structures
- Experimental Studies of Failure Behavior and Strength of H Beams with Stiffened Web Openings under Compression and Bending Loads
- A Combination Mooring System and Mooring Characteristics Study