基于STM32的电脑鼠机器人设计与开发
2016-05-14蒙飚严健平
蒙飚 严健平


摘 要电脑鼠是一种四轮车形状且具有人工智能的小型机器人,针对电脑鼠体积小、实时性要求高等特点,采用高性能的ARM Cortex-M3架构内核的STM32系列处理器作为电脑鼠硬件控制核心,优化机器人行走和搜寻迷宫控制算法,通过精密红外传感器和执行电机,实现了电脑鼠性能的极大提升。
【关键词】STM32 电脑鼠 机器人
电脑鼠机器人是一种能够在迷宫中行进、位置记忆、搜寻终点和优化路径等功能,按照电脑鼠竞赛规则,机器人必须在陌生与未知的迷宫环境中以最快速度及最短时间到达终点完成比赛任务以获得胜利。本文研究的电脑鼠机器人选择了高性能的32位ARM Cortex-M3架构内核的处理器作为控制核心设计了电脑鼠机器人的软硬件系统,实现了电脑鼠机器人系统的稳定快速行走能力、记忆迷宫搜寻轨迹能力和优化最短执行路径能力,相比传统基于8位单片机的电脑鼠系统,极大提升了系统整体性能,同时能够借助本文研究的电脑鼠系统设计案例,进而研究与发明更加复杂的机械控制系统。
1 电脑鼠机器人整体设计方案
电脑鼠机器人软硬件系统由基于STM32的核心处理器、电源稳压电路系统、传感器系统、行走电机执行系统、液晶显示系统和无线网络系统六个子模块组成,其中基于STM32的核心处理器子模块是整个电脑鼠机器人的控制中心,负责与其它五个子模块的信息传输,并运行整体系统的软件程序,实现电脑鼠的流程控制、运算优化和数据存储;电源稳压电路系统负责给系统硬件提供稳定可靠的电源,传感器系统让电脑鼠机器人能够感知迷宫周围环境,行走电机执行系统能让电脑鼠机器人快速直行或转弯,液晶显示系统可以通过屏幕让人们获得机器人的各种状态信息,无线网络系统能实现电脑鼠机器人与远程计算机的联网。电脑鼠机器人整体结构示意图如图1所示。
2 电脑鼠机器人硬件设计
电脑鼠机器人的硬件系统核心处理器采用ST公司的STM32F103R8T6,它的时钟频率最高可达72MHz,内置64K的Flash、20K的RAM、12位AD、4个16位定时器、3路USART通讯口等多种资源,具有极高的性价比。
外围电路方面,由TPS76033电路、TPS5430电路、TPS77333电路组成电源稳压电路系统,其中TPS76033电路负责给陀螺仪供电,TPS5430电路负责给红外发射驱动电路、红外发射电路、红外接收电路供电、其余由TPS77333电路供电;行走电机执行系统由电机驱动电路、编码器(IE2-512)与空心杯电机(1524SR)组成,由系统核心处理器输出控制信号给电机驱动电路,从而使电机实现正转、反转、速度、停止,空心杯电机与编码器是一体的,编码器、空心杯电机与车轮组合用于测量转向、转角、转速、距离,对空心杯电机实现精确的控制;液晶显示系统选用12864规格的显示屏,无线网络系统由ZigBee CC2530模块和WIFI模块构成,负责连接远程计算机组建无线传感网络或云计算网络。
3 电脑鼠机器人软件设计
电脑鼠机器人控制软件采用针对STM32系列芯片的C语言编写,软件流程图如图2所示。首先,电脑鼠机器人进行初始化确定系统初始控制参数;开启电机驱动模式、红外检测模式以及中断模式,对电脑鼠机器人身体姿态进行检测修正,并等待迷宫探测搜寻的“启动指令”。“启动”后电脑鼠机器人开始探测搜寻迷宫,按照一定的控制策略进行迷宫搜寻(如右手、左手、向心等法则),执行电脑鼠机器人的行走控制、路口检测和路程控制程序,以最快的速度完成整个迷宫的探测和搜寻任务。
根据迷宫比赛规则要求,电脑鼠机器人到达迷宫终点后,必须返回到起点位置,并根据之前电脑鼠机器人搜寻迷宫的情况,计算和找出一条最优最短的从起点直达终点的路径并调用冲刺子程序,完成迷宫起点到终点的最快冲刺,完成迷宫比赛任务。
4 系统测试
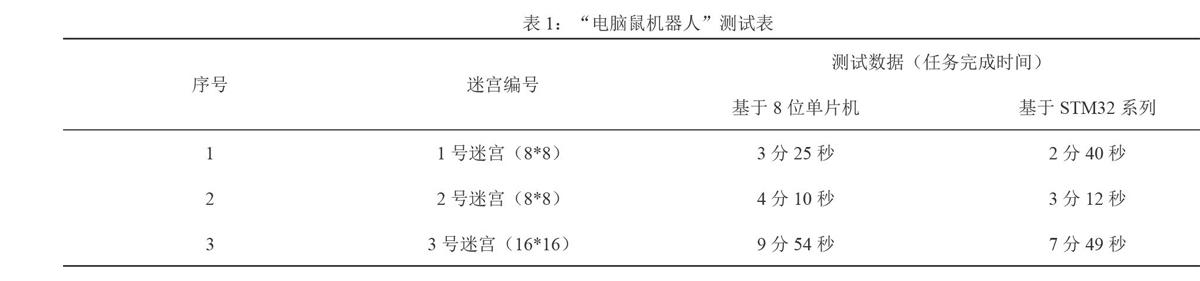
本测试是通过2个不同布局的8*8迷宫和1个不同布局的16*16迷宫,把本文设计的基于STM32系列控制核心的电脑鼠机器人和传统基于8位单片机的电脑鼠机器人进行比较,得到两种电脑鼠机器人完成任务的数据(任务完成时间),如表1所示,可以看出,本文设计的电脑鼠机器人在性能上提高了20%以上。
5 结语
本文主要偏重于硬件系统的设计同时辅助了精简的控制软件,采用高性能STM32处理器,通过配置高精度传感器和优质行走电机,优化电脑鼠循迹算法,实践表明,本设计电脑鼠机器人性能得到极大提升,满足电脑鼠迷宫竞赛的要求,可供同行进行参考。
参考文献
[1]夏炎.基于ARM7的电脑鼠的设计与实现[J].煤炭技术,2010,29(12):188-189.
[2]杨晶菁,张浩.基于AVR单片机的电脑鼠硬件设计与实现[J].福州大学学报(自然科学版),2014,42(6):876-882.
[3]王斌,张卫钢.基于IEEE标准的电脑鼠走迷宫的智能算法研究[J].电子设计工程,2011,19(12):42-45.
[4]周立功.ARM Cortex-M3开发指南[Z].广州:广州致远电子有限公司,2008.
[5]詹杰,刘学兵,张浩.基于直流电机驱动的电脑鼠设计[J].吉首大学学报(自然科学版),2015,36(3):39-44.
作者简介
蒙飚(1981-),男,广西壮族自治区柳州市人。现为柳州职业技术学院副教授。工学硕士学位。研究方向为无线传感网、自动控制技术。
作者单位
柳州职业技术学院 电子信息工程系 广西壮族自治区柳州市 545006
