远程维护系统串口通信协议研究
2016-05-14李青林张萍
李青林 张萍
摘 要伴随着如今不断发展进步的科学技术水平以及不断增强的我国整体经济实力,目前,对于远程设备进行维护以及控制的整体目标,我国就远程维护及控制的相关功能作为基础,开发出了5种高效帧结构,并且设置了远程通讯协议相关的标准制度,建立起了远程维护控制系统,令不同的装备间在串口通讯协议的标准上实现了统一,进而在一定程度上实现了共享信息以及远程维护。
【关键词】串口通信协议 远程维护系统 研究
为了可以实现对一些比较重要的设备进行远程监测以及维修养护,并实现无人监视和无人控制的最终目标,需要建设并完善与之有关的维护系统。建设起远程维护的系统,首先要做的就是处理装备信息接口的统一性,打造比较统一的通讯协议方面的问题。在计算机的控制下,串行通信接口为非常主要的接口,结合装备实际情况来实现计算机与装备间的通讯和交流,进而实现数据的传输。
1 分析并建立串口通讯协议
1.1 分析
整体上来看,串口通讯协议设计主要是在面向连接服务的基础之上的。任何装备对于通信协议的标准都是不同的,这是因为各个研制装备的单位往往都会结合自身的需求以及实际设计型号来制定的,对于信息帧结构也有较多不同的种类,同时在通讯协议中,各个部分内容当中位数也有一定的差异,对数据进行编码的方式自然也不一样。所以,并不能实现不同装备之间信息共享的操作。另外,还有一部分装备并没有设置信息接口,导致设备数据无法进行传输,自然就无法实现远程控制设备。
1.2 建立
结合装备运行的实际情况,制定通讯协议需要令其能够实现对远程设备进行控制以及维护的功能,还要在此基础之上确保空间充足,以便设备进行功能扩展,在通讯协议当中,还需要拥有控制设备、监视参数、设置参数等有一定关联的内容。对现有装备所拥有的通讯协议进行分析和设计的基础之上,构建出能够满足装备的实际情况的一个通讯协议规范,它可以比较严格地对信息帧格式和其他的帧格式之间位数展开规定,按照协议,可以将其分成五类不同的帧结构,不同的帧结构设计类型都会和硬件间优化融合综合起来进行考虑。
2 设计分析五种帧结构
2.1 握手类
这种帧结构直接将设备和接口连接起来,信息接口会定时传送询问帧到设备当中,假如此时装备处于开启状态,装备就会将回应帧传输给接口,在接口收到回应帧之后,双帧联动,就能够实现数据的传输,达到远程控制的目的。
2.2 控制类
这种帧结构将控制功能的实现作为主要目的,它可以对设备进行诸如开机或者关机等控制操作,在进入到这种状态下的时候,接口需要先向整个设备输送控制帧,在设备收到之后,就可以立刻执行这些控制类帧当中的指定命令,并且发送回应帧给接口,待接口收到之后,就可以标记这项操作任务已经完成了。
2.3 检测类
这种帧结构能够很好地实现检测类的相关功能,正确利用检测帧,我们能够对设备的各项系统参数以及运转状态展开系统的检测,在被控制的设备收到接口所传输的监测帧之后,结合信息帧当中的请求,向信息接口传输拥有监测内容的对应帧。在设备接收了这一对应帧之后就会在短时间内立刻进行信息整合,与此同时对其进行分析,保证数据信息高度的安全以及稳定。
2.4 维护类
这种帧结构针对的是拥有维护性能的设备所适用的,它能够对受到控制的设备参数进行必要的设置,进而实现远程维护设备。其具体的操作流程如下:信息接口先向对应设备传输要进行读取的设备参数的信息帧,设备收到了信息帧后,结合信息帧当中所涵盖的内容,传输响应帧到接口当中,这一过程当中,响应帧当中包括信息帧当中全部消息内容,在接口收到了响应帧之后,结合响应帧当中的消息,对消息进行适当的修改以及设置,全部完成之后,可以向设备传输维护类的帧,在设备收到维护帧后,就可以依照维护帧当中的一些信息来对设备进行适当的维护以及设置操作。
2.5 补充类
通常来说这种帧结构都是在设备以及接口间进行信息帧传输的过程当中,结合传输的信息帧长度、帧结构以及数据的字节数来进行精准判断。不过,假如数据长度太大,不能通过一帧来进行传输的时候,就需要借助补充帧结构的作用。先发送并没有进行校验的帧,随后自动传送,在接口收到包含在补充信息帧当中的命令后,就可以标记这次数据通讯活动完毕。
3 传输数据和远程维护系统具体实现
3.1 传输数据的流程
微机传输请求信息,到达设备之后,被控制的设备会先对信息帧进行解码处理,结合协议当中的有关规范,在存储器当中适当地抽取需要的消息,再通过ARM来进行适当的处理,结合规定当中的格式,借助串口,通过信息帧的形式来发送需要的数据信息,到达微机之后,微机接收信息帧,借助其中远程维护软件和协议当中所规定的格式来解码信息帧,从中提取有效的信息,在相应的区域当中显示指定的数据信息。
3.2 实现远程维护系统
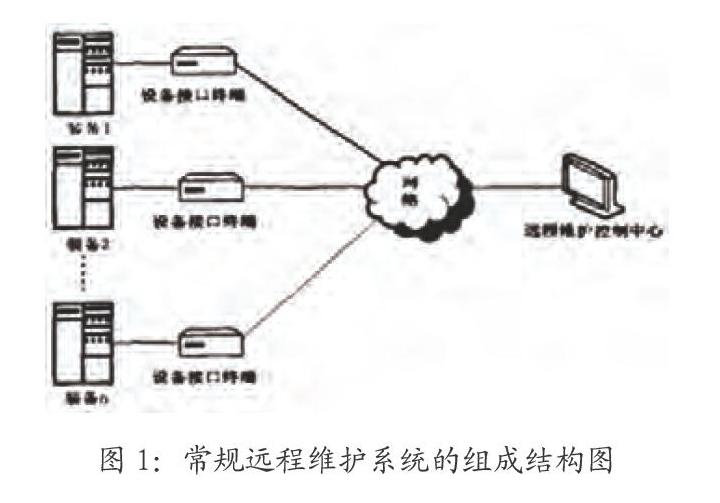
整体上来说,远程维护控制这一系统的主要结构包括远程维护中心、网络组成软件以及设备接口信息终端这样的三个部分所组成,它可以很好地实现对各个被控制的设备进行监视以及维护的目的,通过信息之间的相互传输以及对彼此信息进行破解的过程来实现信息分析,进而能够及时且有效地实现对被控设备进行远程监控的目的,继而对已经有的问题进行适当的预警和提示,继而实现远程维护设备和远程控制设备的最终目的,这一系统的组成可以用图1来展示。
4 结语
设计串口通讯协议,可以起到规范化通讯协议,并统一提供理论支持的作用,可以将装备当中的串口通讯协议进行统一,与此同时,还给装备远程维护的控制系统打造了比较理想的理论平台,针对装备使用和发挥正常效能来说拥有比较现实的意义和价值。
参考文献
[1]杨光,雷志雄.远程维护控制系统串口通信协议研究[J].电子技术,2009(01).
[2]张海滨.浅谈远程维护控制系统的串口通信协议[J].硅谷,2010(24).
[3]何先波,钟乐海,芦东昕.远程串口调试通信协议在嵌入式软件调试器设计中的应用[J].西华师范大学学报:自然科学版,2004(01).
[4]耿铁柱.基于GPRS的控制与保护的远程监控系统的研究[D].沈阳工业大学,2012.
[5]贾本凯,庄卉,王国平,等.卫星小站远程监控系统通信协议设计与实现[J].计算机测量与控制,2012(08).
作者单位
1.中国人民解放军91428部队 浙江省余姚市 315456
2.余姚市电话教育中心网管办 浙江省余姚市 315400
